FOC控制中的正弦PWM和空间矢量PWM对比与理解
参考:
- simple foc:https://docs.simplefoc.com/docs_chinese/foc_theory
- 博客:https://blog.csdn.net/qq_43332314/article/details/126449398
一、无刷电机基础原理
1., 原理图:至少三个绕组线圈(定子)通过电流,产生交变磁场,带动多极磁铁(转子)旋转。
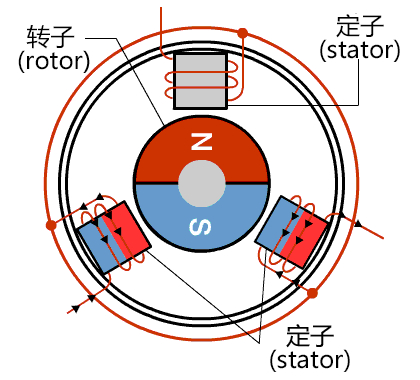
2. 极对数:其中,多极线圈的极对数会对应放大电圈数和实际圈数的比值,例如下面极对数为1,实际与电控转一圈一致;当极对数为2时,转1圈会导致磁场产生类似2圈的变化,因此控制的时候,需要产生相比于极对数为1的2倍周期电流,让实际的转子转一圈。
3. 三相无刷电机的6分区:针对上述的三相电机,可以将一圈分成6个分区进行控制,每个分区60°,这对于后面的空间矢量PWM有重要意义。
二、对比
- 如下图,分别为正弦PWM和空间矢量PWM。
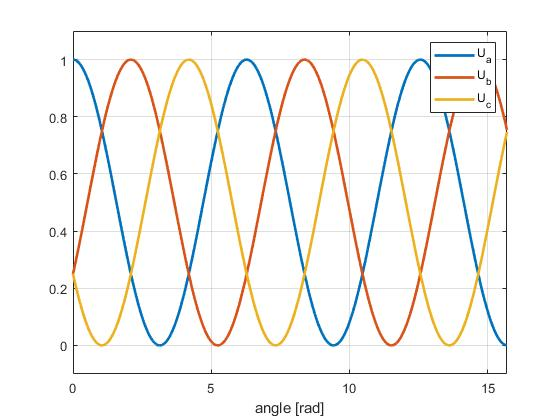
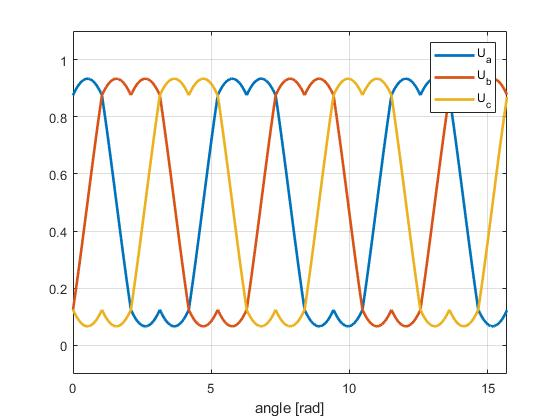
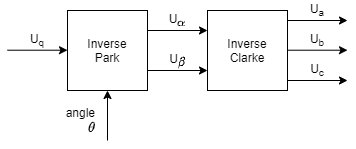
2. 控制流程分别如下:其中正弦PWM通过帕克逆变换和克拉克逆变换得到三项电压,然后变为PWM进行控制。而空间矢量PWM不使用逆变换,直接变换得到时间占比T012,然后变换为电压和PWM数值。
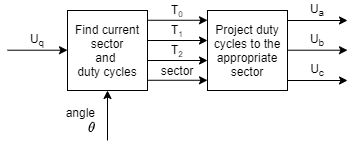
3. 基于控制逻辑的区别,可以看出正弦PWM在\alpha轴时Ua为最大,并最终仅能产生正弦波的变化。而空间矢量PWM利用矢量合成技术得到,实际上在\alpha轴时Ua不应该为最大,而应该在角度为30度时,Ua最大,通过Uc为负值最大。
三、理解
- 基于SVPWM的波形图,以及下方的红色一圈手绘图,希望能够帮助你理解:其中曲线为SVPWM中的Ua相电压变化曲线。
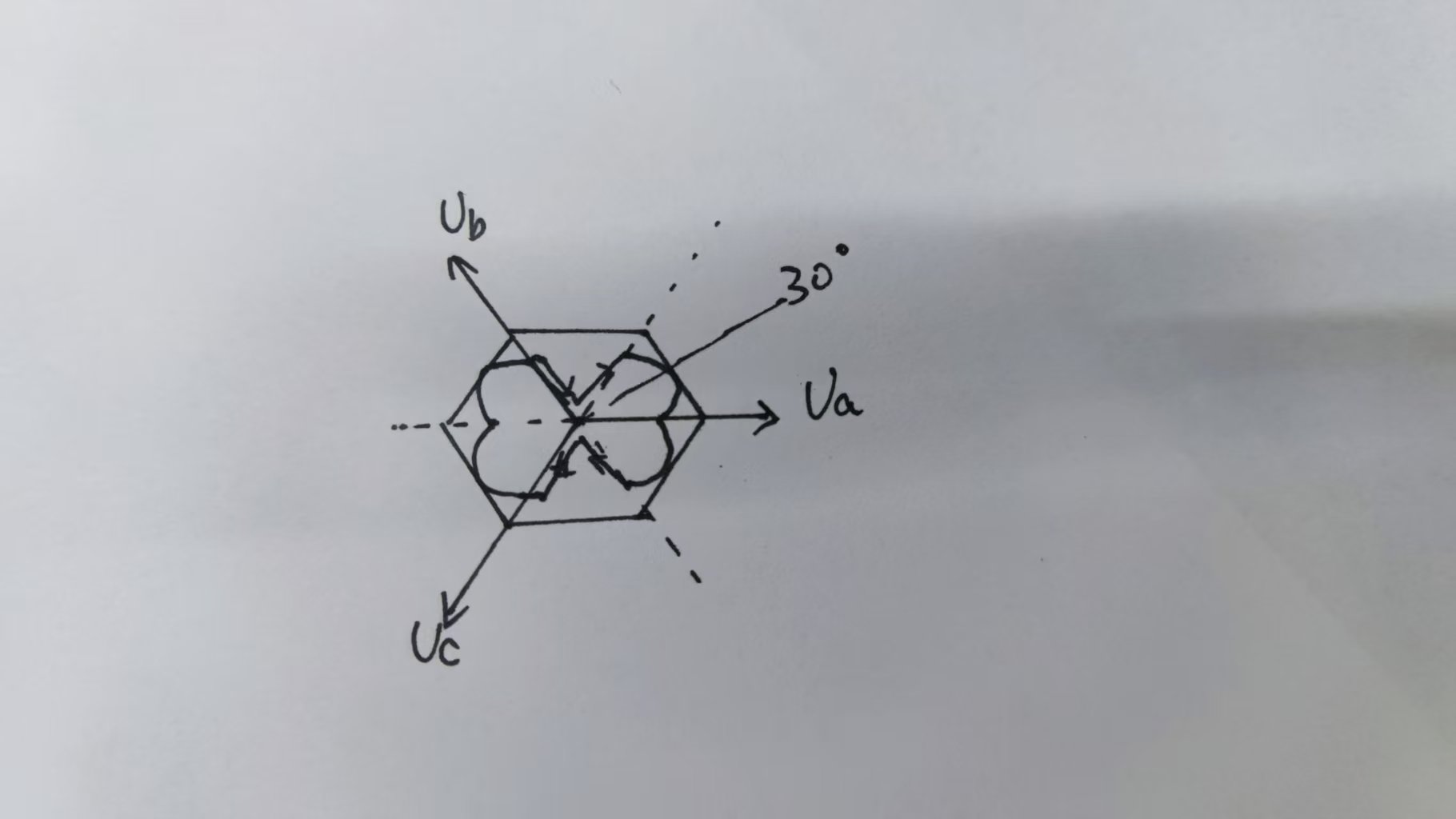
- 针对上述图,可以理解以下几点:
① 在30°时Ua为最大,而不是0°时。
② 在90°的时候,因为和Ua轴正好垂直,不需要通过Ua产生力,因此急剧变为0。
③ 在左半边的时候,图中进行了取反显示,因此和右边正好对称。
④ SVPWM的作用即利用空间矢量合成和拆分原理,将已经合成的矢量Uq拆分给三个相UaUbUc.而分区则是因为6个分区相似,仅需要计算一个分区即可转化到其他分区。
⑤ Simple foc计算分区所在位置的方式为角度得到分区,实际步骤为Uq矢量->角度->分区,实际上可以直接通过Uq->分区计算得到,生一个计算步骤,在其他的博客中会有涉及。