Nature Communications 面向形状可编程磁性软材料的数据驱动设计方法—基于随机设计探索与神经网络的协同优化框架
在智能材料与软体机器人领域,磁性软材料因其高分辨率磁化编程和快速动态响应能力,成为实现复杂形状变形与多功能机器人行为的重要载体。然而,现有设计方法严重依赖直觉驱动的试错策略,难以应对磁-力耦合效应带来的非直观设计空间(如单一参数变化可能引发全局形变失稳)。此外,传统方法多局限于简单二维形态和单一材料设计,无法充分发挥三维结构、多材料协同和动态行为的潜力。针对这一挑战,我们提出了一种数据驱动的“D3-MSP”(Data-Driven Design for Magnetic Soft Programmability)框架,通过融合神经网络引导的随机优化与低成本动态仿真,实现磁性软材料磁化分布、形态结构与功能行为的协同设计。该框架创新性地引入基于球坐标的磁化编码和组合模式生成网络(CPPN),使机器人能够通过非直观设计突破传统性能极限,在跳跃、形变和多材料交互等任务中实现效率与成功率的大幅提升。背景:磁性软材料设计的挑战磁性软材料通过外部磁场控制可实现复杂形状变化,在柔性机器人、生物医学等领域具有重要应用。然而,传统设计方法面临三大挑战:1.非线性耦合难以建模:材料形态与磁化分布的微小变化会引发全局变形的高度非线性响应。2.设计空间维度爆炸:3D多材料结构的设计变量可达~7.8e361种组合,传统优化方法效率低下。3.实验验证成本高昂:物理原型制造涉及激光微加工和磁化编程,单次迭代耗时数小时。现有方法多采用直觉驱动的试错法,局限于简单形态(如直梁、片状结构),无法实现复杂功能(如多稳态跳跃、目标穿越)。针对上述问题,我们提出基于MAP-elites算法与预测性神经网络代理的协同优化框架,突破传统设计范式。核心创新:数据驱动设计框架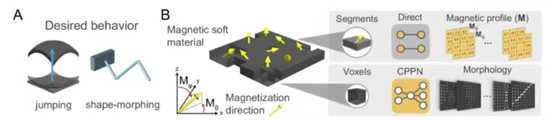
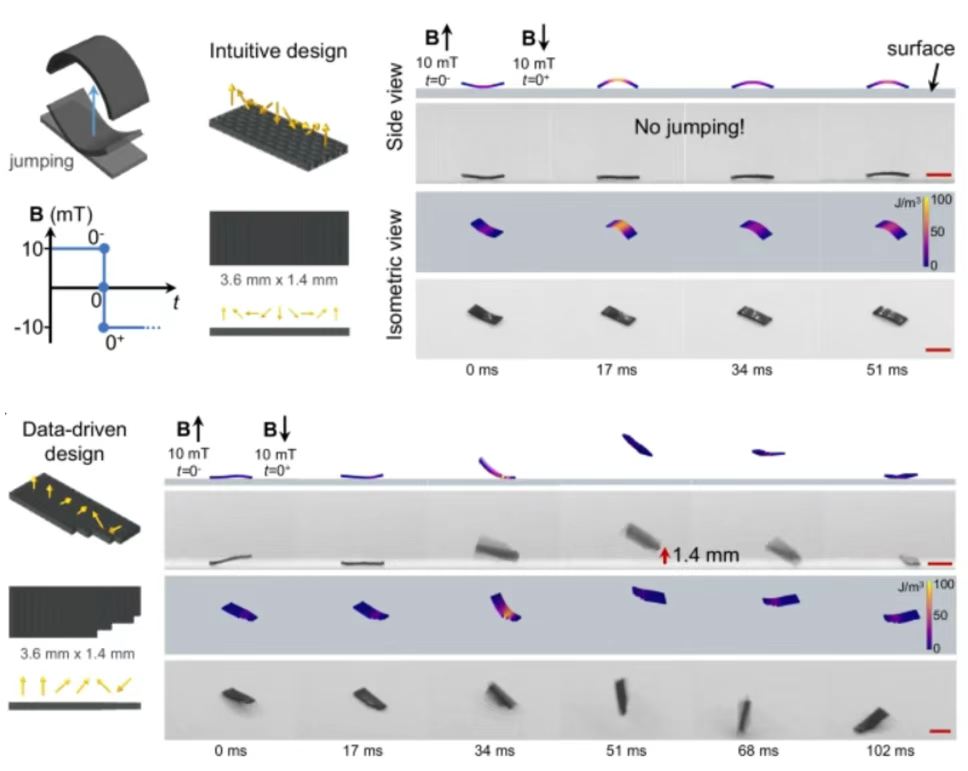
1.形态-磁化的双重参数化表示形态生成:采用组合模式生成网络(CPPN)编码复杂几何特征,支持2D/3D拓扑生成。磁化分布:通过直接磁化段矩阵(Mθ, Mφ)定义局部磁化方向,实现亚毫米级精度控制。多材料集成:引入体素组装(voxel-based assembly)方法,支持被动材料、软/硬磁性材料的混合布局。2.高效率仿真-实验协同优化物理引擎:构建质量-弹簧晶格模型,耦合平移/旋转弹簧与磁力-扭矩动态响应,单次仿真时间<30秒(传统FEM的1/60)。神经网络代理:训练ResNet-50架构预测变形轨迹,替代99.7%的重复仿真计算,实现设计空间快速探索。MAP-elites算法:通过QD-score指标(覆盖度×可靠性)量化设计多样性,在10^5次迭代内探索非直观高性能结构。3.热辅助磁编程验证技术开发激光微加工系统,结合Nd2Fe14B磁性颗粒定向编程,实现平面内/外磁化方向误差<3.5°。建立sim2real补偿模型,通过阻尼系数拟合将仿真-实验跳跃高度误差从22.3%降低至6.8%。实验验证:从基础变形到功能机器人 1.复杂形状变形实验(模拟与实物对比)我们首先通过模拟环境验证数据驱动设计的磁化软材料在复杂形状变形中的性能。例如,针对非直观形状(如变幅正弦波、方波、钻石形),算法优化了磁化分布与形态,使软梁在恒定磁场下精确变形。仿真与实验结果显示,平均位置均方根误差(RMSE)低于0.2 mm,且3D螺旋结构的变形设计空间达3.4e¹⁸⁶,远超传统直觉方法。2.动态行为优化实验(跳跃性能与形态任务)在真实磁场环境中,我们对比了数据驱动设计与文献中的直觉方法。结果显示,数据驱动设计的磁软机器人跳跃高度达1.4 mm(0.39体长),而直觉设计在相同条件下完全无法离地。此外,通过优化磁化分布,我们实现了最小包围球体积(减少2.6倍)和最大旋转圈数,验证了框架在形态任务中的高效性。3.多材料3D结构运动能力验证我们设计了多材料组合的3D结构,测试其在磁场下的运动能力。实验表明,垂直跳跃高度达5 mm(0.36体长),定向跳跃距离为20 mm(1.43体长),而7×7×5体素结构在旋转磁场下每周期位移6.5 mm。这些结果展示了多材料集成与复杂3D形态对功能行为的显著提升。4.仿真与实物一致性验证(sim2real)通过对比仿真预测与实验数据,我们发现复杂形状变形的动态轨迹误差低于5%,且跳跃行为的仿真时间序列与实验高度吻合。这一结果验证了仿真引擎的可靠性,为快速设计迭代提供了基础。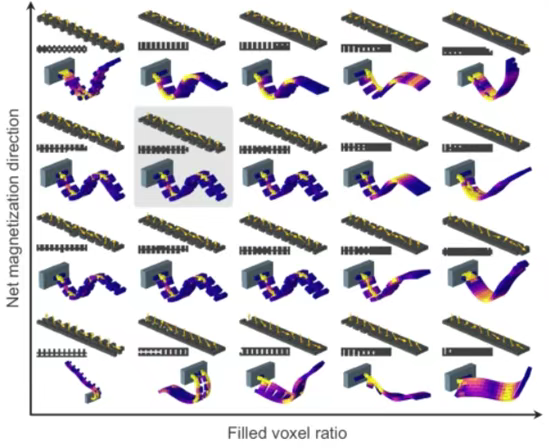
5.算法性能基准测试我们对比了随机搜索、原始MAP-Elites等方法的性能。数据驱动框架在覆盖度(提升40%)、精度(误差减少62%)和全局最优解发现率(提高3.8倍)上均显著优于其他方法,证明了其在超大规模设计空间中的高效探索能力。结论:本研究通过数据驱动框架,系统性优化磁性软材料的磁化分布与形态,实现了复杂形变与多功能行为的协同设计,为下一代智能软体机器人、自适应医疗设备提供了全新范式。未来,该框架可扩展至更多刺激响应材料(如光、热响应),推动软物质智能的跨领域应用。