卷积神经网络常用结构
空间注意力机制(Spatial Attention)详解
空间注意力机制(Spatial Attention)详解
空间注意力机制是计算机视觉中的重要组件,它使网络能够选择性地关注特征图中的重要空间区域,同时抑制不相关区域的影响。
空间注意力机制结构图
空间注意力机制详细解析
1. 基本原理
空间注意力机制的核心思想是让网络学会区分输入特征图中的不同空间位置的重要性,关注那些对当前任务最相关的区域。这种机制特别适用于需要精确定位的视觉任务,如目标检测、图像分割等。
2. 详细结构与工作流程
步骤一:特征提取与通道压缩
-
输入:形状为 C×H×W 的特征图(C是通道数,H和W是空间维度)
-
操作
:通过通道维度的压缩操作生成空间特征表示
-
常用方法:
-
最大池化和平均池化:分别对通道维度进行最大池化和平均池化,生成两个 1×H×W 的特征图
-
通道卷积:使用1×1卷积将通道数降为较小值(例如1)
-
-
F_avg = AvgPool(F) // 通道平均池化,得到1×H×W F_max = MaxPool(F) // 通道最大池化,得到1×H×W F_spatial = Concat([F_avg, F_max]) // 拼接为2×H×W
步骤二:空间特征处理
-
操作
:使用卷积层对步骤一生成的特征进行处理
-
通常使用7×7或3×3的卷积核
-
输出通道数为1
-
F_attention = Conv2d(F_spatial) // 用k×k卷积降至1×H×W
步骤三:生成注意力权重
-
操作
:通过激活函数(通常是Sigmoid)将特征值归一化到[0,1]区间,作为注意力权重
-
这些权重反映了各空间位置的重要性
-
Attention_map = Sigmoid(F_attention) // 将值归一化到0-1
步骤四:注意力加权
-
操作
:将原始特征图与注意力权重图相乘,选择性地强调重要区域
-
这是按元素相乘操作(element-wise multiplication)
-
注意力权重广播到所有通道
-
Output = F × Attention_map // 广播乘法,重加权原始特征
3. 变体与改进
-
双重注意力机制:同时使用空间注意力和通道注意力
-
先应用通道注意力,再应用空间注意力
-
两种注意力机制互补,全面提升特征表示能力
-
-
自适应空间注意力:根据输入内容动态调整感受野大小
-
使用可变形卷积或多尺度处理
-
-
密集连接空间注意力:在多个层级应用空间注意力并密集连接
-
提升网络对不同抽象级别的空间关系的感知
-
4. 优势与应用场景
优势:
-
提高了模型对重要区域的关注度,忽略背景和噪声
-
不显著增加模型参数量和计算复杂度
-
可插入现有网络架构中,提供即插即用的性能提升
-
提供了模型解释性,通过可视化注意力图可了解网络关注点
应用场景:
-
语义分割:精确关注目标边界区域
-
目标检测:突出物体区域,抑制背景干扰
-
医学图像分析:关注病变区域,忽略正常组织
-
行人重识别:关注人物显著特征
-
场景文本识别:定位与聚焦文本区域
6. 实现细节与技巧
-
注意力门控:使用更复杂的门控机制替代简单的Sigmoid
-
多头空间注意力:类似Transformer的多头机制,并行计算多组空间注意力
-
步长设计:在下采样路径中可使用步长卷积减小计算量
-
归一化选择:在注意力模块中的归一化层选择(BatchNorm vs. LayerNorm)会影响性能
空间注意力是一种强大而灵活的机制,通过学习"看哪里"的能力,显著提升了深度卷积神经网络在各种视觉任务中的性能。
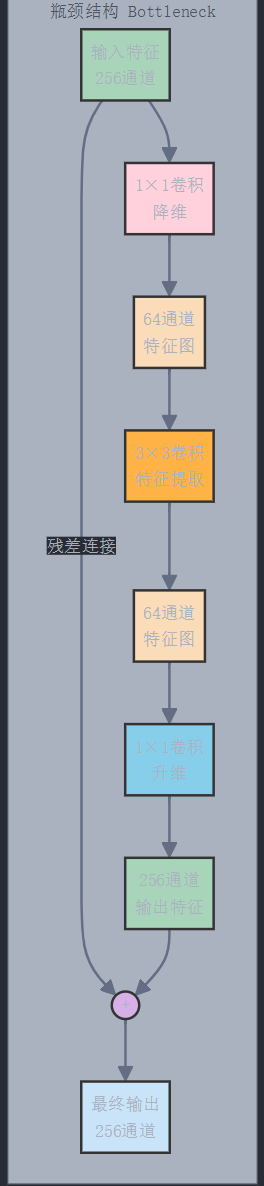
瓶颈结构(Bottleneck Structure)详解
瓶颈结构是深度神经网络中的一种经典设计模式,特别是在ResNet等深层网络中广泛应用。它通过先降维再升维的策略显著减少计算复杂度,使网络能够更高效地运行。
瓶颈结构示意图
瓶颈结构详细解析
1. 基本原理
瓶颈结构的核心思想是通过一种"三明治"式的设计来减少计算量:先使用1×1卷积降低通道维度,然后在低维空间执行常规3×3卷积提取特征,最后再使用1×1卷积恢复通道维度。这种结构之所以称为"瓶颈",是因为中间层的通道数(64)相比输入输出层(256)显著减少,形成了类似瓶颈的形状。
2. 详细结构与工作流程
步骤一:降维(Dimensionality Reduction)
-
操作:使用1×1卷积将输入特征的通道数从较高维度(如256)降低到较低维度(如64)
-
目的:减少后续3×3卷积的计算量
-
数学表示:
F_reduced = W_1×1^down * X
其中W_1×1^down是一个降维的1×1卷积核
步骤二:特征提取(Feature Extraction)
-
操作:在降维后的特征上应用标准的3×3卷积
-
目的:在低维空间提取空间特征,此时计算量已大幅减少
-
数学表示:
F_extracted = W_3×3 * F_reduced
其中W_3×3是3×3卷积核
步骤三:升维(Dimensionality Restoration)
-
操作:使用1×1卷积将通道数从低维(如64)恢复到原始的高维(如256)
-
目的:恢复特征的表达能力,使其可以与输入特征兼容(特别是用于残差连接时)
-
数学表示:
F_restored = W_1×1^up * F_extracted
其中W_1×1^up是一个升维的1×1卷积核
步骤四:残差连接(可选但常见)
-
操作:将原始输入特征加到升维后的特征上
-
目的:缓解梯度消失问题,提升训练稳定性
-
数学表示:
Y = F_restored + X
3. 计算效率分析
为了理解瓶颈结构的效率,让我们比较使用和不使用瓶颈结构的计算量:
不使用瓶颈结构(直接使用3×3卷积):
-
假设输入和输出都是256通道,使用3×3卷积
-
计算量:
3 × 3 × 256 × 256 × H × W = 589,824 × H × W
使用瓶颈结构:
-
步骤一(1×1降维):
1 × 1 × 256 × 64 × H × W = 16,384 × H × W
-
步骤二(3×3卷积):
3 × 3 × 64 × 64 × H × W = 36,864 × H × W
-
步骤三(1×1升维):
1 × 1 × 64 × 256 × H × W = 16,384 × H × W
-
总计算量:
(16,384 + 36,864 + 16,384) × H × W = 69,632 × H × W
比较:使用瓶颈结构后,计算量减少了约88%,而且参数量也相应减少。
4. 典型实现(以ResNet中的瓶颈块为例)
ResNet中的瓶颈块包含以下组件:
-
1×1卷积降维
-
批归一化(BatchNorm) + ReLU激活
-
3×3卷积提取特征
-
批归一化(BatchNorm) + ReLU激活
-
1×1卷积升维
-
批归一化(BatchNorm)
-
与输入进行残差连接
-
ReLU激活
每个卷积后通常会跟随批归一化和ReLU激活函数,但最后的升维卷积后的ReLU会放在残差连接之后。
5. 伪代码实现(PyTorch风格)
class Bottleneck(nn.Module):def __init__(self, in_channels, bottleneck_channels, out_channels, stride=1):super(Bottleneck, self).__init__()# 降维:1×1卷积self.conv1 = nn.Conv2d(in_channels, bottleneck_channels, kernel_size=1, bias=False)self.bn1 = nn.BatchNorm2d(bottleneck_channels)# 特征提取:3×3卷积self.conv2 = nn.Conv2d(bottleneck_channels, bottleneck_channels, kernel_size=3, stride=stride, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(bottleneck_channels)# 升维:1×1卷积self.conv3 = nn.Conv2d(bottleneck_channels, out_channels, kernel_size=1, bias=False)self.bn3 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)# 残差连接(如果输入输出通道数不一致,需要1×1卷积调整)self.downsample = Noneif stride != 1 or in_channels != out_channels:self.downsample = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(out_channels))def forward(self, x):identity = x# 降维out = self.conv1(x)out = self.bn1(out)out = self.relu(out)# 特征提取out = self.conv2(out)out = self.bn2(out)out = self.relu(out)# 升维out = self.conv3(out)out = self.bn3(out)# 残差连接if self.downsample is not None:identity = self.downsample(x)out += identityout = self.relu(out)return out
6. 瓶颈结构的变体
-
MobileNet v2中的倒置残差块(Inverted Residual Block):
-
先升维,然后使用深度可分离卷积,最后降维
-
与标准瓶颈结构相反,因此称为"倒置"
-
-
ResNeXt中的分组瓶颈块:
-
在常规瓶颈块基础上增加了分组卷积
-
将降维后的特征分成多个并行分支进行处理
-
-
SENet中的带注意力的瓶颈块:
-
在瓶颈块后集成通道注意力机制
-
自适应调整不同通道的重要性
-
7. 优势与应用场景
优势:
-
显著减少计算复杂度和参数量
-
在保持表达能力的同时提高计算效率
-
允许网络变得更深,而不会导致计算需求过高
-
与残差连接结合时,可进一步提高训练稳定性和模型性能
应用场景:
-
深层卷积神经网络:ResNet、ResNeXt等
-
轻量级网络:MobileNetV2中的倒置残差块
-
计算资源受限场景:如移动设备和嵌入式系统
-
实时计算需求:目标检测、语义分割等需要高效计算的任务
8. 实际案例研究:ResNet-50中的瓶颈块
ResNet-50广泛应用瓶颈结构,将通道数从64/128/256/512先降低到64/128/256/512的1/4,然后进行3×3卷积,最后再恢复原始通道数。这种设计让ResNet-50能够达到与更深的普通残差网络相当的性能,同时计算量显著减少。
在实际应用中,由于瓶颈结构的高效计算特性,它已成为设计深度卷积神经网络的标准组件,特别是在资源受限或需要实时推理的应用场景中。
瓶颈结构的设计哲学——"先降维,再计算,后升维"——体现了在深度学习中平衡计算效率和模型表达能力的智慧,已成为现代网络架构设计的重要原则。
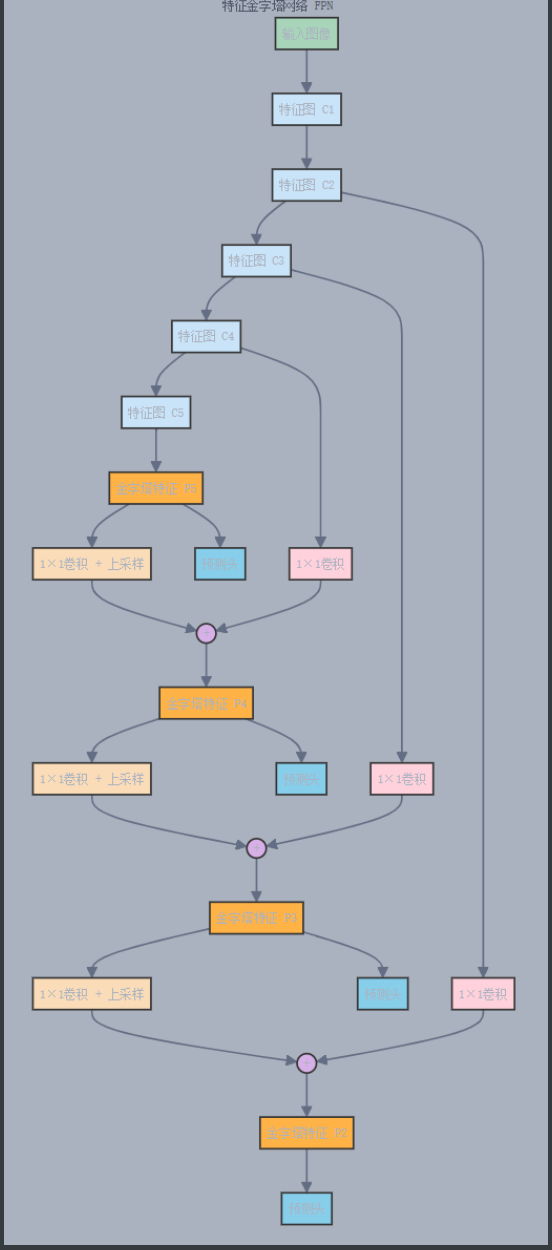
特征金字塔网络(Feature Pyramid Network)详解
特征金字塔网络(FPN)是一种多尺度特征提取架构,它可以有效地生成多个分辨率的特征图,用于处理不同大小的目标,特别是在目标检测和实例分割等任务中表现出色。
特征金字塔网络结构图
FPN的核心问题与解决方案
在目标检测等任务中,我们面临的主要挑战之一是如何处理不同尺寸的目标。小目标需要高分辨率特征以保留细节,而大目标则需要更抽象的语义特征来识别。
传统CNN存在的问题:
-
浅层特征:分辨率高,空间细节丰富,但语义信息弱
-
深层特征:语义信息强,但分辨率低,空间细节丢失
FPN的解决方案是创建一个特征金字塔,结合各层的优势,实现"既有高级语义信息,又有精确空间定位"的特征表示。
详细工作流程解析
让我们用一个更具体的例子,假设我们使用ResNet作为主干网络,逐步解释FPN的工作流程:
1. 自底向上路径(主干网络处理)
这是普通CNN的前向传播过程。输入图像通过主干网络(如ResNet)处理后,会生成一系列特征图:
-
C1:第一层卷积后的特征图,通常尺寸为原图的1/2(由于初始下采样)
-
C2:第一阶段ResNet块输出,尺寸为原图的1/4
-
C3:第二阶段输出,尺寸为原图的1/8
-
C4:第三阶段输出,尺寸为原图的1/16
-
C5:第四阶段输出,尺寸为原图的1/32
随着网络深度增加,特征图空间尺寸逐渐减小,通道数增加,语义信息增强但空间细节减少。
举例:对于640×640的输入图像,各特征图尺寸如下:
-
C1: 320×320
-
C2: 160×160
-
C3: 80×80
-
C4: 40×40
-
C5: 20×20
2. 横向连接(通道统一化)
不同层的特征图通道数不同(ResNet中通常是64→256→512→1024→2048),为使它们可以融合,需要先统一通道数。
FPN对每个特征图(C2-C5)应用1×1卷积,将它们的通道数统一调整为相同值(通常为256):
L2 = Conv_1x1(C2) # 将C2的通道数调整为256 L3 = Conv_1x1(C3) # 将C3的通道数调整为256 L4 = Conv_1x1(C4) # 将C4的通道数调整为256 L5 = Conv_1x1(C5) # 将C5的通道数调整为256
这一步仅改变通道数,不改变特征图的空间尺寸。
3. 自顶向下路径(语义信息增强)
这是FPN的核心创新。从最高层特征图开始,向下逐层构建特征金字塔:
① 最顶层处理:
-
P5直接使用L5(调整通道后的C5)
P5 = L5 # 尺寸20×20,通道数256
② 构建P4:
-
将P5上采样到与L4相同的尺寸(空间尺寸翻倍,通常使用最近邻上采样)
-
将上采样后的特征与L4逐元素相加
P5_upsampled = Upsample(P5) # 从20×20上采样到40×40 P4 = L4 + P5_upsampled # 两个40×40特征图相加
③ 构建P3:
-
将P4上采样到与L3相同的尺寸
-
将上采样后的特征与L3逐元素相加
P4_upsampled = Upsample(P4) # 从40×40上采样到80×80 P3 = L3 + P4_upsampled # 两个80×80特征图相加
④ 构建P2:
-
将P3上采样到与L2相同的尺寸
-
将上采样后的特征与L2逐元素相加
P3_upsampled = Upsample(P3) # 从80×80上采样到160×160 P2 = L2 + P3_upsampled # 两个160×160特征图相加
4. 特征增强(可选)
为减少上采样可能带来的混叠效应,FPN通常对每个融合后的特征图应用3×3卷积进行"平滑":
P2 = Conv_3x3(P2) # 3×3卷积增强特征,输入输出通道数不变 P3 = Conv_3x3(P3) P4 = Conv_3x3(P4) P5 = Conv_3x3(P5)
5. 构建完成的特征金字塔
最终得到的特征金字塔包含四个特征图:P2、P3、P4和P5,它们的空间尺寸分别是原图的1/4、1/8、1/16和1/32,但通道数都是统一的(通常为256)。
这些特征图结合了深层的语义信息和浅层的空间细节:
-
P2:高分辨率,包含细节信息,适合检测小目标
-
P3和P4:中等分辨率,平衡语义和空间信息
-
P5:低分辨率,强语义信息,适合检测大目标
工作原理的可视化解释
想象一下,我们在检测一张包含人脸、整个人体和远处小人的图像:
-
初始特征提取:
-
C2捕获边缘、纹理等低级特征(高分辨率)
-
C5捕获"这是人"这样的高级语义(低分辨率)
-
-
信息融合:
-
自顶向下路径将"这是人"的语义信息传递到高分辨率层
-
横向连接保留了原始高分辨率层的空间细节
-
-
最终特征金字塔:
-
P2:可以检测远处的小人(高分辨率+语义信息)
-
P5:可以检测整个人体(强语义信息)
-
关键点总结
FPN的核心操作是"语义增强的自顶向下路径",它通过以下方式工作:
-
信息流动:高层的强语义信息通过上采样和加法操作流向低层
-
特征融合:不同级别的特征通过横向连接和元素相加进行融合
-
多尺度输出:同时保留多个分辨率级别的特征,形成一个"金字塔"
这种设计使FPN能够同时处理不同尺度的目标,在目标检测和实例分割任务中取得了显著的性能提升。
希望这个更详细的解释能帮助你理解FPN的工作流程!如果还有不清楚的地方,请随时提问。
3. 详细实现(PyTorch伪代码)
class FPN(nn.Module):def __init__(self, backbone_channels, fpn_channels=256):super(FPN, self).__init__()# 横向连接层(1×1卷积)self.lateral_c2 = nn.Conv2d(backbone_channels[0], fpn_channels, kernel_size=1)self.lateral_c3 = nn.Conv2d(backbone_channels[1], fpn_channels, kernel_size=1)self.lateral_c4 = nn.Conv2d(backbone_channels[2], fpn_channels, kernel_size=1)self.lateral_c5 = nn.Conv2d(backbone_channels[3], fpn_channels, kernel_size=1)# 特征增强层(3×3卷积)self.smooth_p2 = nn.Conv2d(fpn_channels, fpn_channels, kernel_size=3, padding=1)self.smooth_p3 = nn.Conv2d(fpn_channels, fpn_channels, kernel_size=3, padding=1)self.smooth_p4 = nn.Conv2d(fpn_channels, fpn_channels, kernel_size=3, padding=1)self.smooth_p5 = nn.Conv2d(fpn_channels, fpn_channels, kernel_size=3, padding=1)# 用于上采样的函数self.upsample = nn.Upsample(scale_factor=2, mode='nearest')def forward(self, inputs):c2, c3, c4, c5 = inputs # 主干网络的输出特征# 横向连接lateral_p2 = self.lateral_c2(c2)lateral_p3 = self.lateral_c3(c3)lateral_p4 = self.lateral_c4(c4)lateral_p5 = self.lateral_c5(c5)# 自顶向下路径p5 = lateral_p5p4 = lateral_p4 + self.upsample(p5)p3 = lateral_p3 + self.upsample(p4)p2 = lateral_p2 + self.upsample(p3)# 特征增强p5 = self.smooth_p5(p5)p4 = self.smooth_p4(p4)p3 = self.smooth_p3(p3)p2 = self.smooth_p2(p2)return [p2, p3, p4, p5] # 多尺度特征金字塔
4. 计算量和内存分析
FPN在计算效率和内存使用方面做了良好的设计:
-
参数量:主要增加的参数来自1×1横向连接卷积和3×3平滑卷积
-
计算量:额外的计算主要在上采样和横向连接的融合,但与主干网络相比增加不多
-
内存:需要存储每个尺度的特征图,内存消耗与原始网络相比有所增加
典型的ResNet-50-FPN与原始ResNet-50相比:
-
参数量增加约3%
-
推理时间增加约20-30%
-
但检测/分割性能通常会有显著提升(5-10% mAP)
5. 变体与改进
-
PANet (Path Aggregation Network):
-
在FPN基础上增加了自底向上的第二条路径
-
增强了底层信息向高层的传递
-
-
BiFPN (Bidirectional FPN):
-
使用双向的跨尺度连接
-
增加了加权融合机制,学习不同特征的贡献
-
-
NAS-FPN (Neural Architecture Search FPN):
-
使用神经架构搜索来自动发现最佳的跨尺度连接方式
-
非规则连接模式通常优于手工设计的规则模式
-
-
ASFF (Adaptively Spatial Feature Fusion):
-
使用自适应权重融合不同尺度的特征
-
比简单的元素相加提供更灵活的融合机制
-
6. 优势与应用场景
优势:
-
生成多尺度特征表示,适合检测不同大小的目标
-
融合不同层次的语义信息和空间细节
-
结构简单,易于实现和集成到现有网络中
-
几乎可以与任何主干网络结合使用
应用场景:
-
目标检测:如Faster R-CNN with FPN,处理不同尺度的目标
-
实例分割:如Mask R-CNN,提供精确的边界定位
-
语义分割:提供多尺度上下文信息
-
关键点检测:定位精细的位置信息
7. 实际应用中的最佳实践
-
上采样方法选择:
-
最近邻上采样简单高效,但可能产生锯齿状边缘
-
双线性上采样平滑但可能模糊细节
-
转置卷积可学习上采样参数,但可能产生棋盘效应
-
-
特征融合策略:
-
简单相加是标准做法,易于实现且效果良好
-
加权相加/拼接可以提供更灵活的融合方式
-
注意力机制可以自适应地调整不同特征的重要性
-
-
FPN层数选择:
-
通常使用主干网络的C2-C5特征图(4个尺度)
-
某些应用可能添加更多层(P6、P7等)以处理更大尺度范围
-
-
横向连接中的通道数:
-
通常为256,平衡表达能力和计算效率
-
轻量级网络可以使用更少的通道(如128或64)
-
8. 案例研究:FPN在目标检测中的应用
在Faster R-CNN框架中加入FPN后:
-
使用多尺度特征P2-P5进行区域提议生成(RPN)和目标分类/回归
-
根据目标大小,将其分配到不同层级的特征图上:小目标使用P2,大目标使用P5
-
显著提升了小目标的检测性能,同时保持大目标的良好检测率
特征金字塔网络通过其优雅的多尺度特征融合机制,已成为现代计算机视觉系统中处理尺度变化的标准组件,特别是在需要精确定位的任务中。
FPN中自顶向下过程的特征图变化详解
我将详细讲述特征金字塔网络(FPN)中自顶向下过程的每个特征图模块的通道数和尺寸变化。为了具体说明,我假设使用ResNet-50作为主干网络,输入图像尺寸为640×640。
初始特征图(主干网络输出)
首先,经过ResNet-50主干网络后,我们得到的初始特征图如下:
| 特征图 | 空间尺寸 | 通道数 | 相对原图比例 |
|---|---|---|---|
| C2 | 160×160 | 256 | 1/4 |
| C3 | 80×80 | 512 | 1/8 |
| C4 | 40×40 | 1024 | 1/16 |
| C5 | 20×20 | 2048 | 1/32 |
注:C1通常不用于构建FPN,因为它尺寸太大且计算成本高。
横向连接(通道统一化)
接下来,应用1×1卷积对每个特征图进行通道数调整:
| 特征图 | 输入 | 操作 | 输出(L) | 输出尺寸 | 输出通道数 |
|---|---|---|---|---|---|
| C2 → L2 | C2(160×160, 256) | 1×1卷积 | L2 | 160×160 | 256 |
| C3 → L3 | C3(80×80, 512) | 1×1卷积 | L3 | 80×80 | 256 |
| C4 → L4 | C4(40×40, 1024) | 1×1卷积 | L4 | 40×40 | 256 |
| C5 → L5 | C5(20×20, 2048) | 1×1卷积 | L5/P5 | 20×20 | 256 |
这一步骤所有特征图的空间尺寸保持不变,只是通道数被统一调整为256。L5直接作为P5使用。
自顶向下路径(特征融合)
现在开始从顶层向下构建特征金字塔:
步骤1: 构建P5
P5 = L5 # 尺寸20×20,通道数256
步骤2: 构建P4
P5_upsampled = Upsample(P5) # 从20×20上采样到40×40,通道数保持256 P4 = L4 + P5_upsampled # 两个40×40,通道数为256的特征图相加
| 操作 | 输入 | 输出 | 尺寸变化 | 通道数 |
|---|---|---|---|---|
| 上采样P5 | P5(20×20, 256) | P5_up | 20×20 → 40×40 | 256 |
| 特征融合 | L4(40×40, 256) + P5_up(40×40, 256) | P4 | 保持40×40 | 256 |
步骤3: 构建P3
P4_upsampled = Upsample(P4) # 从40×40上采样到80×80,通道数保持256 P3 = L3 + P4_upsampled # 两个80×80,通道数为256的特征图相加
| 操作 | 输入 | 输出 | 尺寸变化 | 通道数 |
|---|---|---|---|---|
| 上采样P4 | P4(40×40, 256) | P4_up | 40×40 → 80×80 | 256 |
| 特征融合 | L3(80×80, 256) + P4_up(80×80, 256) | P3 | 保持80×80 | 256 |
步骤4: 构建P2
P3_upsampled = Upsample(P3) # 从80×80上采样到160×160,通道数保持256 P2 = L2 + P3_upsampled # 两个160×160,通道数为256的特征图相加
| 操作 | 输入 | 输出 | 尺寸变化 | 通道数 |
|---|---|---|---|---|
| 上采样P3 | P3(80×80, 256) | P3_up | 80×80 → 160×160 | 256 |
| 特征融合 | L2(160×160, 256) + P3_up(160×160, 256) | P2 | 保持160×160 | 256 |
特征增强(可选)
为了减少上采样带来的混叠效应,通常会对P2-P5应用3×3卷积进行"平滑"处理:
P2 = Conv_3x3(P2) # 160×160,256通道 → 160×160,256通道 P3 = Conv_3x3(P3) # 80×80,256通道 → 80×80,256通道 P4 = Conv_3x3(P4) # 40×40,256通道 → 40×40,256通道 P5 = Conv_3x3(P5) # 20×20,256通道 → 20×20,256通道
这一步骤不改变特征图的尺寸和通道数,只是进一步增强特征质量。
最终特征金字塔
经过以上处理,我们得到的最终特征金字塔如下:
| 特征图 | 空间尺寸 | 通道数 | 相对原图比例 | 特点 |
|---|---|---|---|---|
| P2 | 160×160 | 256 | 1/4 | 高空间分辨率,适合小目标 |
| P3 | 80×80 | 256 | 1/8 | 中等空间分辨率 |
| P4 | 40×40 | 256 | 1/16 | 中等空间分辨率 |
| P5 | 20×20 | 256 | 1/32 | 低空间分辨率,适合大目标 |
数据流动图示
为了更清晰地理解整个过程,以下是简化的数据流动图:
C5(20×20, 2048) → 1×1卷积 → L5/P5(20×20, 256)↓上采样(尺寸×2)↓ C4(40×40, 1024) → 1×1卷积 → L4(40×40, 256) + P5_up(40×40, 256) → P4(40×40, 256)↓上采样(尺寸×2)↓ C3(80×80, 512) → 1×1卷积 → L3(80×80, 256) + P4_up(80×80, 256) → P3(80×80, 256)↓上采样(尺寸×2)↓ C2(160×160, 256) → 1×1卷积 → L2(160×160, 256) + P3_up(160×160, 256) → P2(160×160, 256)
关键信息总结
-
通道数变化:
-
所有的特征图通过1×1卷积统一到256通道
-
自顶向下过程中通道数保持不变
-
-
尺寸变化:
-
上采样操作将特征图尺寸扩大2倍(通常使用最近邻上采样)
-
每一层的特征融合操作不改变空间尺寸
-
-
信息流动:
-
高层语义信息通过上采样向下传递
-
底层空间细节通过横向连接保留
-
每一层Pi同时包含来自主干网络对应层的空间细节和上层的语义信息
-
这种设计使FPN能够在不同尺度上都具有丰富的语义表示,从而有效地处理各种大小的目标。
通道数变化是卷积神经网络中的一个基本操作,1×1卷积恰好提供了一种高效调整通道数的方法。下面我来解释为什么通过1×1卷积可以将不同通道数的C1-C5统一变成256通道:
1×1卷积如何改变通道数
1×1卷积虽然在空间维度上只有1×1的大小,但它的核心功能就是在通道维度上进行线性变换:
-
假设输入特征图有C_in个通道
-
我们可以设置1×1卷积的输出通道数为任意值C_out
-
1×1卷积的参数量为C_in × C_out
-
卷积操作会将输入的C_in个通道线性组合成C_out个通道
具体数学原理
1×1卷积本质上是对每个空间位置(x,y)执行线性变换:
对于输出通道j (j=1,2,...,C_out): Output[j,x,y] = ∑(i=1 to C_in) Weight[j,i] × Input[i,x,y] + Bias[j]
这个公式表明:
-
每个输出通道是所有输入通道的加权和
-
权重矩阵大小为C_out × C_in
-
对于每个空间位置,都执行相同的通道变换
实际例子
以C5转换为L5为例:
-
C5有2048个通道
-
我们需要将其转换为256个通道
-
使用输出通道数为256的1×1卷积
# PyTorch代码示例 conv1x1 = nn.Conv2d(in_channels=2048, out_channels=256, kernel_size=1) L5 = conv1x1(C5) # C5: [batch_size, 2048, 20, 20] → L5: [batch_size, 256, 20, 20]
这个1×1卷积有2048×256 = 524,288个权重参数,它会学习如何最佳地将2048个通道的信息压缩到256个通道中。
为什么这种转换有效
-
信息压缩:深层特征(如C5)的2048个通道中存在冗余信息,可以被有效压缩
-
学习最优表示:卷积的权重是通过反向传播学习的,网络会自动学习最有用的通道组合方式
-
参数高效:1×1卷积只需要C_in×C_out个参数,比其他尺寸的卷积参数更少
-
计算高效:1×1卷积的计算复杂度远低于标准卷积,同时完成了通道调整
不同通道数转换的差异
虽然C2到C5的通道数分别为256、512、1024和2048,但它们都使用同样的方法转换到256通道:
| 特征图 | 输入通道数 | 1×1卷积 | 输出通道数 | 参数量 |
|---|---|---|---|---|
| C2→L2 | 256 | Conv(256→256) | 256 | 65,536 |
| C3→L3 | 512 | Conv(512→256) | 256 | 131,072 |
| C4→L4 | 1024 | Conv(1024→256) | 256 | 262,144 |
| C5→L5 | 2048 | Conv(2048→256) | 256 | 524,288 |
可以看出,虽然参数量不同,但原理是相同的:为每一个输出通道学习一组最优的输入通道组合权重。
简单来说,1×1卷积提供了一种灵活的方法,可以将任意输入通道数转换为任意输出通道数,这正是FPN中统一通道维度所需要的。通过学习权重,网络能够保留不同层次特征中最有价值的信息,使得后续的特征融合更加有效。
让我用一个具体的例子来解释1×1卷积如何调整通道数:
简化示例:3×3尺寸,4通道到2通道的1×1卷积
假设我们有一个小型特征图,其尺寸为3×3,有4个通道。我们想用1×1卷积将其通道数从4改为2。
输入特征图
假设输入特征图的形状是[4, 3, 3],可以表示为四个3×3的矩阵:
通道1:
1 2 3 4 5 6 7 8 9
通道2:
2 4 6 8 10 12 14 16 18
通道3:
3 6 9 12 15 18 21 24 27
通道4:
4 8 12 16 20 24 28 32 36
1×1卷积的权重
建立一个输出通道为2,输入通道为4的1×1卷积,其权重矩阵为2×4:
W = [[0.1, 0.2, 0.3, 0.4], // 输出通道1的权重[0.5, 0.6, 0.7, 0.8] // 输出通道2的权重 ]
为简化,我们假设偏置都为0。
1×1卷积的计算过程
对于特征图中的每个位置,我们执行以下计算:
计算左上角位置(0,0):
-
输入值: [1, 2, 3, 4](四个通道在位置(0,0)的值)
-
输出通道1: 1×0.1 + 2×0.2 + 3×0.3 + 4×0.4 = 0.1 + 0.4 + 0.9 + 1.6 = 3.0
-
输出通道2: 1×0.5 + 2×0.6 + 3×0.7 + 4×0.8 = 0.5 + 1.2 + 2.1 + 3.2 = 7.0
同样,计算位置(0,1):
-
输入值: [2, 4, 6, 8](位置(0,1)的值)
-
输出通道1: 2×0.1 + 4×0.2 + 6×0.3 + 8×0.4 = 0.2 + 0.8 + 1.8 + 3.2 = 6.0
-
输出通道2: 2×0.5 + 4×0.6 + 6×0.7 + 8×0.8 = 1.0 + 2.4 + 4.2 + 6.4 = 14.0
以此类推,对所有9个位置都计算出新的值。
输出特征图
最终,我们得到一个形状为[2, 3, 3]的特征图,也就是2个通道:
输出通道1:
3.0 6.0 9.0 12.0 15.0 18.0 21.0 24.0 27.0
输出通道2:
7.0 14.0 21.0 28.0 35.0 42.0 49.0 56.0 63.0
关键观察
-
独立处理位置:每个位置(如左上角)单独进行通道转换,没有与其他位置混合
-
空间尺寸保持:输入和输出的空间尺寸都是3×3,没有变化
-
通道数变化:输入的4个通道被转换为2个通道
-
信息保留:虽然通道数减少,但两个新通道包含了原始四个通道的信息(线性组合)
类比解释
这个过程就像是:
-
你有一张3×3的纸格,每个格子里写4个数字(4通道)
-
对每个格子,你按一个固定公式,把这4个数字变成2个新数字
-
最后你得到一张新的3×3纸格,每个格子里有2个数字(2通道)
在FPN中,这个过程允许我们将C2、C3、C4和C5的不同通道数(256/512/1024/2048)统一变成相同的通道数(如256),而保持它们的空间尺寸不变,从而使后续的特征融合成为可能。
组归一化(Group Normalization)详解
组归一化(Group Normalization, GN)是一种深度神经网络中的归一化技术,它解决了批归一化(Batch Normalization)在小批量训练时性能下降的问题,特别适用于需要较小批量大小的高分辨率图像处理任务。
组归一化结构图
组归一化详细解析
1. 基本原理
组归一化的核心思想是将通道维度分成多个组,然后在每个组内部独立进行归一化。与批归一化在批次维度上计算统计量不同,组归一化在通道组内计算,因此不依赖于批量大小,解决了小批量训练中的问题。
组归一化可以被视为介于Layer Normalization(对所有通道归一化)和Instance Normalization(对每个通道单独归一化)之间的中间方案。
2. 详细结构与工作流程
假设输入特征形状为[N, C, H, W],其中N是批量大小,C是通道数,H和W是特征图的高度和宽度。
步骤一:通道分组
-
操作:将C个通道分成G个组,每组有C/G个通道
-
目的:为后续的组内归一化做准备
-
数学表示:
groups = [C/G, G, H, W] # 重新排列张量形状
步骤二:组内统计计算
-
操作:在每个组内计算均值和方差
-
目的:获取归一化所需的统计量
-
数学表示:
# 对每个组分别计算 for g in range(G):mean[g] = 1/(C/G * H * W) * sum(x[g, :, :, :])var[g] = 1/(C/G * H * W) * sum((x[g, :, :, :] - mean[g])^2)
这些统计量是在每个样本的每个组内分别计算的,不依赖于批量大小。
步骤三:归一化
-
操作:使用计算的统计量对每个组进行归一化
-
目的:标准化特征分布
-
数学表示:
# 对每个组分别归一化 for g in range(G):x_norm[g] = (x[g] - mean[g]) / sqrt(var[g] + ε)
其中ε是一个小常数,防止除零错误。
步骤四:仿射变换
-
操作:应用可学习的缩放和偏移参数
-
目的:恢复特征的表达能力,允许网络学习最适合的分布
-
数学表示:
y = γ * x_norm + β
其中γ和β是形状为C的可学习参数。
3. 完整数学表达式
组归一化的完整过程可以用以下公式表示:
x_i = x[i, :, :, :] # 第i个样本的特征 groups_i = reshape(x_i, (G, C/G, H, W)) # 将通道分组 for g in range(G):μ_g = 1/(C/G * H * W) * sum(groups_i[g])σ_g = sqrt(1/(C/G * H * W) * sum((groups_i[g] - μ_g)^2) + ε)groups_norm_i[g] = (groups_i[g] - μ_g) / σ_g x_norm_i = reshape(groups_norm_i, (C, H, W)) y_i = γ * x_norm_i + β
4. 伪代码实现(PyTorch风格)
class GroupNorm(nn.Module):def __init__(self, num_channels, num_groups=32, eps=1e-5):super(GroupNorm, self).__init__()self.num_groups = num_groupsself.eps = epsself.gamma = nn.Parameter(torch.ones(num_channels))self.beta = nn.Parameter(torch.zeros(num_channels))def forward(self, x):# x的形状: [N, C, H, W]N, C, H, W = x.size()# 将通道维度分组x = x.view(N, self.num_groups, C // self.num_groups, H, W)# 在组内计算均值和方差mean = x.mean(dim=(2, 3, 4), keepdim=True)var = x.var(dim=(2, 3, 4), keepdim=True)# 归一化x = (x - mean) / torch.sqrt(var + self.eps)# 恢复原始形状x = x.view(N, C, H, W)# 应用可学习的仿射参数return x * self.gamma.view(1, C, 1, 1) + self.beta.view(1, C, 1, 1)
5. 组归一化与其他归一化方法的比较
| 归一化方法 | 计算统计量的维度 | 依赖批量大小 | 适用场景 |
|---|---|---|---|
| 批归一化(BN) | 批次维度(N) | 是 | 大批量训练,CNN |
| 层归一化(LN) | 通道、高、宽(C,H,W) | 否 | RNN, Transformer |
| 实例归一化(IN) | 高、宽(H,W) | 否 | 风格迁移 |
| 组归一化(GN) | 组内所有维度 | 否 | 小批量训练,高分辨率图像 |
6. 组归一化的优势与挑战
优势:
-
批量大小无关:性能不受批量大小影响,适用于小批量训练
-
训练稳定性:与批归一化相比,提供更稳定的训练行为
-
分布内一致性:每个样本内部归一化,不受其他样本分布影响
-
适应大模型:特别适合GPU内存有限而需要小批量的大型模型
挑战:
-
组数选择:需要选择适当的组数,这是一个超参数
-
计算效率:某些硬件平台上可能比批归一化稍慢
-
特定任务适应性:某些任务中可能不如批归一化效果好
7. 应用场景
组归一化特别适合于以下场景:
-
目标检测与实例分割:YOLO、Mask R-CNN等需要大输入图像的模型
-
图像生成模型:GAN等对训练稳定性要求高的模型
-
3D卷积网络:医学影像等需要处理高维数据的应用
-
视频理解:需要处理时空数据的模型
-
高分辨率图像处理:由于内存限制需要小批量的场景
8. 组数选择建议
组数(G)的选择是组归一化的一个重要超参数:
-
通用建议:G=32通常是一个不错的起点
-
通道数较少时:可以使用更小的组数,例如G=16或G=8
-
通道数较多时:可以使用较大的组数,例如G=64
-
极端情况
:
-
G=1时,组归一化退化为层归一化
-
G=C时,组归一化退化为实例归一化
-
在实践中,应根据具体任务和模型结构进行调整和实验。
9. 实际应用示例
在目标检测网络如Mask R-CNN中,组归一化通常这样应用:
# 在卷积层之后应用组归一化 conv = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1) gn = nn.GroupNorm(num_groups=32, num_channels=out_channels) relu = nn.ReLU(inplace=True) # 前向传播 x = relu(gn(conv(x)))
特别是在图像分割、目标检测等任务中,由于高分辨率图像处理需要减小批量大小,组归一化往往能显著提升性能。
通过在通道组内计算统计量,组归一化提供了一种有效的归一化方案,既不依赖于批量大小,又能平衡全局和局部信息,成为深度学习中处理小批量训练的重要工具。
批归一化(Batch Normalization)详解
批归一化(Batch Normalization, BN)是深度神经网络中最常用的归一化技术之一,由Sergey Ioffe和Christian Szegedy在2015年提出。它通过归一化每一批次(batch)的激活值,显著提高了深度网络的训练速度、稳定性和泛化能力。
批归一化结构图
批归一化详细解析
1. 基本原理
批归一化的核心思想是解决深度神经网络训练中的内部协变量偏移(Internal Covariate Shift)问题,即网络中间层输入分布在训练过程中不断变化,导致后续层需要持续适应这些变化。批归一化通过标准化每一批次的数据,使得每层输入具有相似的分布特性,从而稳定训练过程。
具体来说,批归一化在每个特征通道上独立地对批次内的激活值进行归一化,然后通过可学习的参数恢复数据的表达能力。
2. 详细结构与工作流程
假设输入特征形状为[N, C, H, W],其中N是批量大小,C是通道数,H和W是特征图的高度和宽度。
步骤一:计算批次统计量
-
操作:在每个通道上,计算当前批次所有样本在所有空间位置上的均值和方差
-
目的:获取批次内数据分布的特征
-
数学表示:
# 对每个通道c计算均值
μ_c = 1/(N*H*W) * ∑_{n,h,w} x[n,c,h,w]
# 对每个通道c计算方差
σ_c² = 1/(N*H*W) * ∑_{n,h,w} (x[n,c,h,w] - μ_c)²
步骤二:标准化
-
操作:使用计算得到的均值和标准差对每个通道的数据进行标准化
-
目的:将数据调整为均值为0,方差为1的分布
-
数学表示:
x_norm[n,c,h,w] = (x[n,c,h,w] - μ_c) / √(σ_c² + ε)
其中ε是一个小常数(通常设为1e-5),用于数值稳定性,防止除零错误。
步骤三:缩放和偏移
-
操作:应用可学习的参数γ和β对标准化后的数据进行线性变换
-
目的:恢复数据的表达能力,使网络能够学习最适合任务的数据分布
-
数学表示:
y[n,c,h,w] = γ_c * x_norm[n,c,h,w] + β_c
γ和β是每个通道独立的可学习参数。
步骤四:运行时统计量更新(仅在训练时)
-
操作:使用指数移动平均更新整个数据集的均值和方差估计
-
目的:存储全局统计量,用于测试/推理阶段
-
数学表示:
μ_running = momentum * μ_running + (1 - momentum) * μ_batch σ²_running = momentum * σ²_running + (1 - momentum) * σ²_batch
通常momentum设为0.9或0.99。
3. 训练与推理阶段的差异
批归一化在训练和推理阶段的行为有重要差异:
训练阶段:
-
使用当前批次的统计量(μbatch, σ²batch)进行归一化
-
更新运行时统计量(μrunning, σ²running)
-
启用反向传播以学习γ和β参数
推理阶段:
-
使用训练过程中累积的运行时统计量(μrunning, σ²running)而非批次统计量
-
不更新任何统计量
-
计算是确定性的,不依赖当前批次
这种设计允许模型在推理时对任意数量的样本进行处理,而不仅限于训练时的批量大小。
4. 伪代码实现(PyTorch风格)
class BatchNorm2d(nn.Module):def __init__(self, num_features, eps=1e-5, momentum=0.1):super(BatchNorm2d, self).__init__()self.num_features = num_featuresself.eps = epsself.momentum = momentum# 可学习参数self.gamma = nn.Parameter(torch.ones(num_features))self.beta = nn.Parameter(torch.zeros(num_features))# 运行时统计量self.register_buffer('running_mean', torch.zeros(num_features))self.register_buffer('running_var', torch.ones(num_features))def forward(self, x):# x的形状: [N, C, H, W]if self.training:# 计算当前批次统计量batch_mean = x.mean(dim=(0, 2, 3)) # 计算均值batch_var = x.var(dim=(0, 2, 3), unbiased=False) # 计算方差# 更新运行时统计量self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * batch_meanself.running_var = (1 - self.momentum) * self.running_var + self.momentum * batch_var# 使用批次统计量进行归一化mean, var = batch_mean, batch_varelse:# 推理模式下使用运行时统计量mean, var = self.running_mean, self.running_var# 标准化x_norm = (x - mean.view(1, -1, 1, 1)) / torch.sqrt(var.view(1, -1, 1, 1) + self.eps)# 缩放与偏移return self.gamma.view(1, -1, 1, 1) * x_norm + self.beta.view(1, -1, 1, 1)
5. 批归一化的理论解释
批归一化的作用机制有多种理论解释:
-
减轻内部协变量偏移:
-
原始论文提出的主要动机
-
通过标准化每层输入,减少分布变化,使后续层更容易适应
-
-
平滑损失景观:
-
使损失函数更平滑,减少了锐利的局部极小值
-
允许使用更大的学习率进行训练
-
-
减少对初始化的敏感性:
-
通过归一化,减轻了不良初始化对网络性能的影响
-
使深层网络训练更加稳定
-
-
隐式正则化效果:
-
每个批次中样本间的交互提供了正则化效果
-
减少过拟合,提高泛化能力
-
6. 批归一化的优势与局限性
优势:
-
加速训练:允许使用更大的学习率,显著减少训练所需的迭代次数
-
简化初始化:减少了对精细权重初始化的依赖
-
增强稳定性:降低了训练中的梯度问题,如梯度消失/爆炸
-
正则化效果:在某些情况下可以减少或替代其他正则化方法(如dropout)
局限性:
-
小批量敏感性:性能严重依赖于批量大小,当批量太小时效果下降
-
序列模型适应性:在RNN等序列模型中应用复杂,需要特殊处理
-
分布差异问题:当训练集和测试集分布差异大时,性能可能下降
-
计算开销:需要额外的内存来存储批次统计量和中间结果
7. 批归一化的实际应用
批归一化已成为大多数CNN架构的标准组件,典型用法:
-
位置选择:
-
通常应用在卷积/全连接层之后,激活函数之前
-
例如:Conv → BN → ReLU
-
-
超参数设置:
-
ε: 通常设为1e-5,用于数值稳定性
-
momentum: 通常设为0.9或0.99,控制运行时统计量更新速度
-
-
常见变体:
-
同步批归一化(Synchronized BatchNorm):多GPU训练时在设备间同步计算统计量
-
冻结批归一化(Frozen BatchNorm):微调预训练模型时固定BN层参数
-
-
迁移学习中的处理:
-
通常在微调时保持BN层的γ和β可学习,但冻结统计量
-
或完全冻结预训练模型中的BN层
-
8. 与其他归一化方法的比较
| 特性 | 批归一化(BN) | 层归一化(LN) | 实例归一化(IN) | 组归一化(GN) |
|---|---|---|---|---|
| 计算方向 | 跨样本(N) | 跨通道(C) | 单特征图内 | 通道组内 |
| 批量依赖 | 强依赖 | 不依赖 | 不依赖 | 不依赖 |
| 适用模型 | CNN | RNN,Transformer | 风格迁移 | 通用 |
| 训练/测试行为 | 不同 | 相同 | 相同 | 相同 |
| 参数量 | 2×C | 2×C | 2×C | 2×C |
批归一化在大批量训练和标准CNN中表现最好,而其他归一化方法在不同场景下各有优势。
9. 实际案例:ResNet中的批归一化
ResNet等现代CNN中,批归一化通常这样应用:
# 典型的ResNet块 class ResBlock(nn.Module):def __init__(self, in_channels, out_channels, stride=1):super(ResBlock, self).__init__()# 第一个卷积单元self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)self.bn1 = nn.BatchNorm2d(out_channels)# 第二个卷积单元self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channels)# 跳跃连接self.shortcut = nn.Sequential()if stride != 1 or in_channels != out_channels:self.shortcut = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(out_channels))def forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = F.relu(out)out = self.conv2(out)out = self.bn2(out)out += self.shortcut(residual)out = F.relu(out)return out
注意在实际ResNet中,批归一化被放置在卷积之后、ReLU激活之前。这种设计已被证明能够最大化批归一化的效果。
批归一化作为深度学习中最重要的创新之一,极大地改善了深度网络的训练过程,是现代卷积神经网络不可或缺的组成部分。
内部协变量偏移确实是一个抽象的概念,让我用一个具体例子来解释这个问题:
内部协变量偏移的实际例子
想象一下你正在训练一个深层神经网络来识别猫和狗的图片。这个网络有多个层:
输入图像 → 层1 → 层2 → 层3 → ... → 层10 → 输出预测
没有批归一化时发生的问题
-
起初训练:
-
你开始训练网络,第1层学习了一些边缘检测器
-
第2层接收这些边缘特征,并开始学习如何组合它们识别简单形状(如耳朵、眼睛)
-
-
几百次迭代后:
-
随着第1层权重的更新,它输出的特征分布发生了变化
-
现在第1层可能输出更强的边缘响应,或者关注不同类型的边缘
-
-
这导致的问题:
-
第2层正在学习如何处理某种分布的输入
-
但现在突然接收到了不同分布的输入(因为第1层改变了)
-
第2层必须调整自己来适应这个新分布,而不仅仅是学习它的实际任务
-
这就像是你在学习阅读,但每天醒来发现字母的外观都有轻微变化。你不仅要学习阅读,还要不断适应这些变化的字母形状。
具体数值例子
假设第1层最初输出的特征值分布集中在0附近,范围在[-2, 2]之间:
输出分布:均值 = 0,标准差 = 1
几次迭代后,由于权重更新,第1层输出的分布变成:
输出分布:均值 = 5,标准差 = 3
第2层原本适应了均值为0的输入,现在需要处理均值为5的输入,这就需要第2层重新调整其权重和偏置,而不是专注于学习更高级的特征。
批归一化如何解决这个问题
批归一化在第1层和第2层之间插入标准化操作:
-
无论第1层输出什么样的分布,批归一化都将其标准化为均值0,方差1
-
第2层始终接收到相似统计分布的输入
-
这样第2层可以专注于学习其任务,而不必不断适应输入分布的变化
用我们的例子:
-
第1层输出:均值 = 5,标准差 = 3
-
批归一化处理后:均值 ≈ 0,标准差 ≈ 1
-
第2层输入:始终保持在相似的分布范围
这就像是有人确保无论字母形状如何变化,都会被标准化成一种一致的形式再呈现给你,这样你可以专注于学习阅读,而不是适应字母的变化。
现实生活类比
想象你是一家餐厅的厨师,负责制作沙拉:
-
没有批归一化:每天收到的蔬菜大小、新鲜度各不相同,你需要不断调整切法、调味来保证最终菜品的一致性。
-
有批归一化:在你处理前,有人将所有蔬菜清洗、切成标准大小并确保新鲜度一致,你只需要专注于创造最佳的味道组合。
批归一化本质上就是在神经网络各层之间添加了这种"标准化预处理"步骤,让每一层都能专注于自己的学习任务,而不必不断适应前一层输出分布的变化。