(一)机器人仿真平台pybullet基础学习(操作记录)
一、环境配置
git clone https://github.com/bulletphysics/bullet3.gitconda create -n bullet3 python=3.10conda activate bullet3pip install pybullet
pip install numpy==1.26.4
conda install matplotlib二、例子学习
所在文件夹
bullet3/examples/pybullet/gym/pybullet_robots
bullet3/examples/pybullet/gym/pybullet_examples
1、pybullet_robots
(1)laikago
python ./pybullet_robots/laikago/laikago.py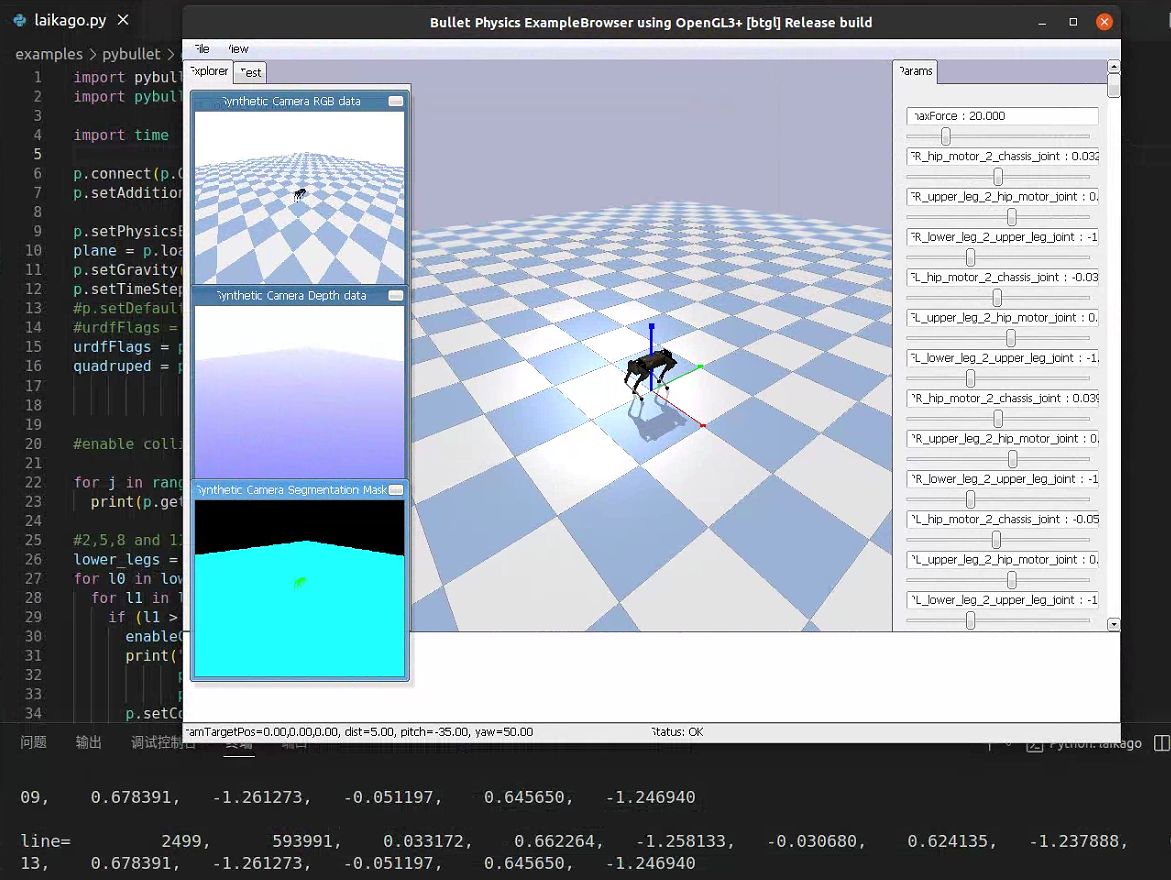
(2)panda
python ./pybullet_robots/panda/loadpanda.py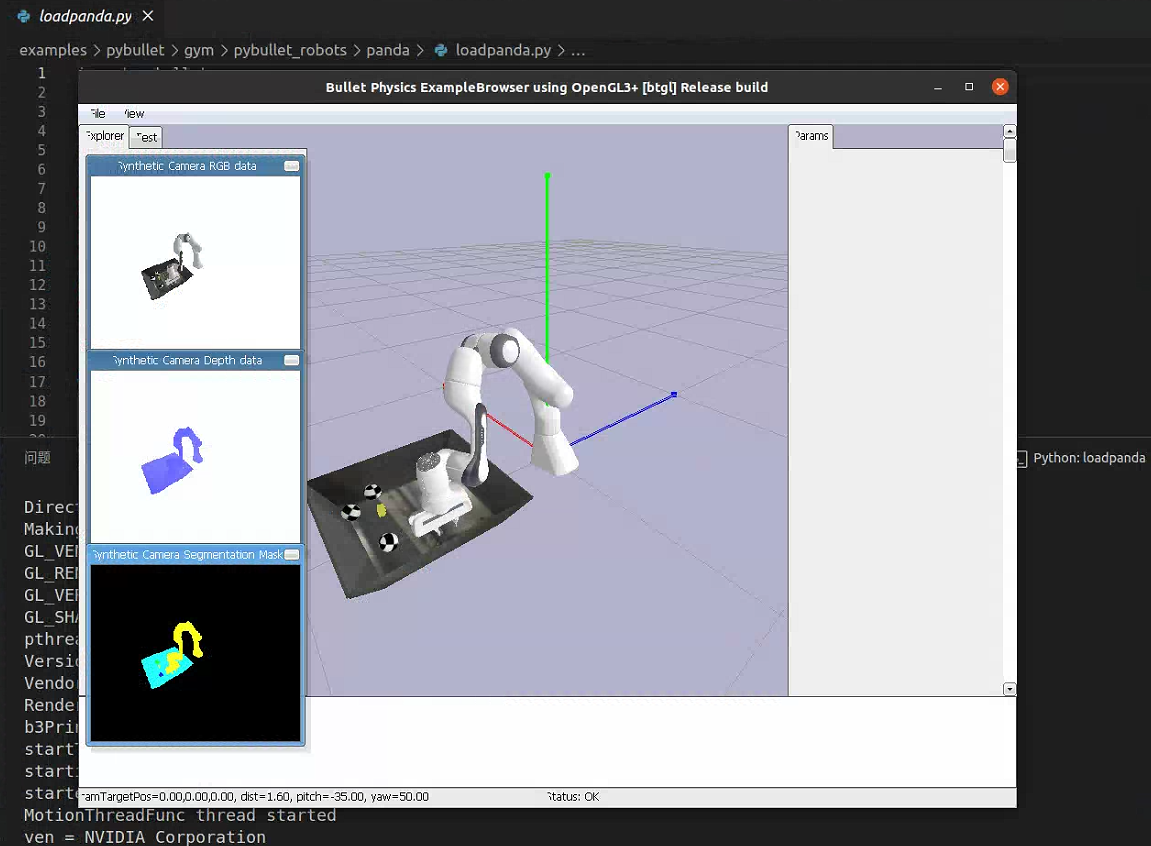
python ./pybullet_robots/panda/loadpanda_grasp.py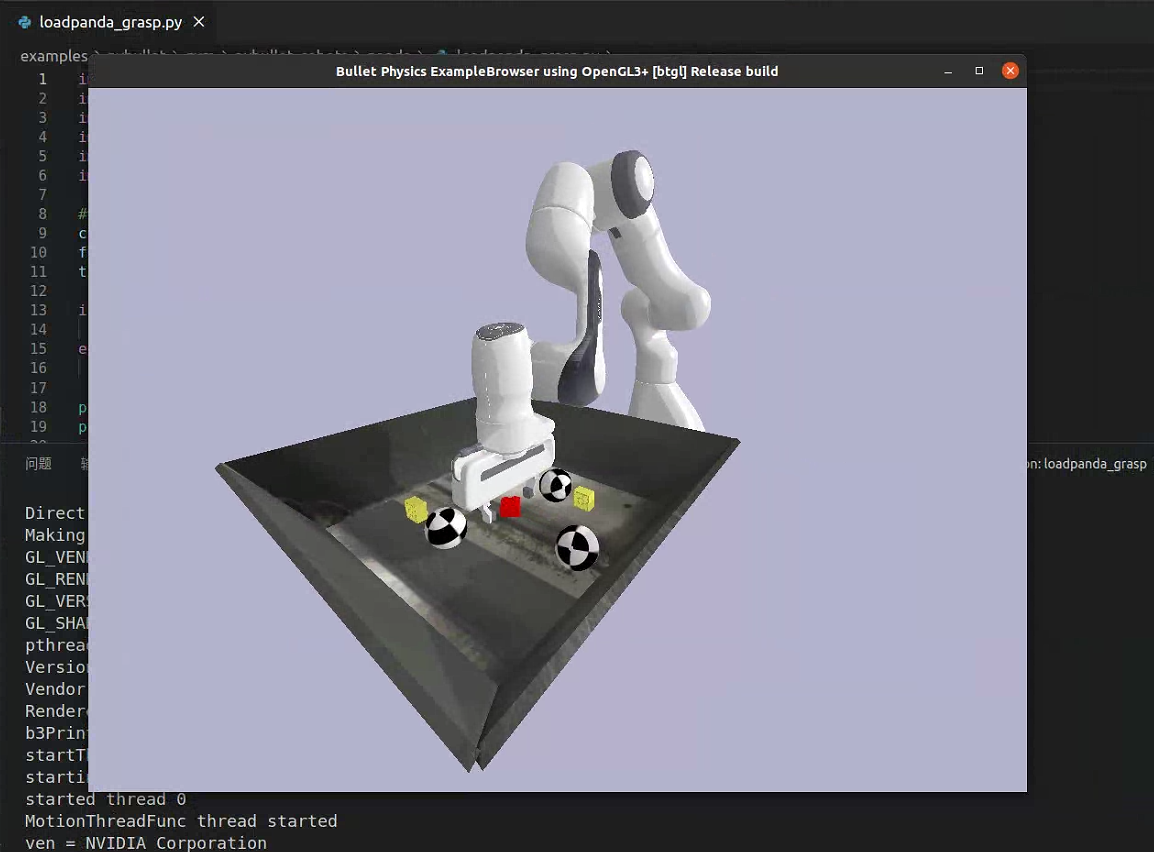
python ./pybullet_robots/panda/batchsim3_grasp.py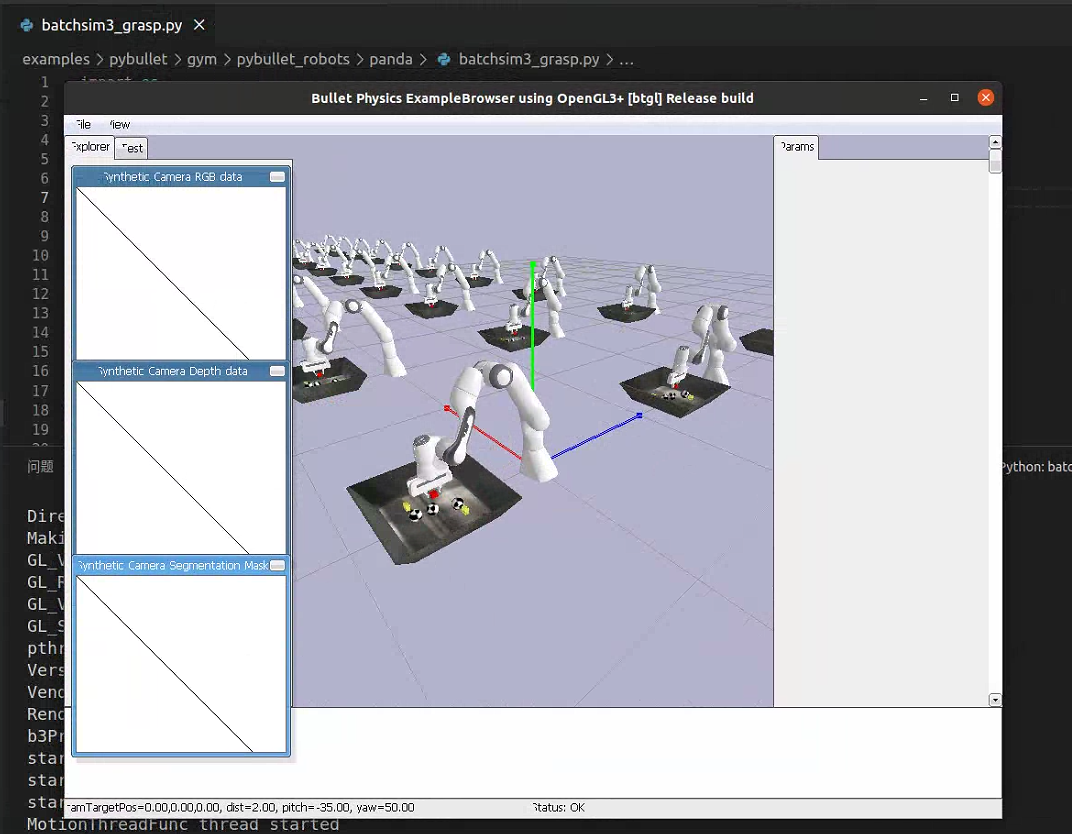
(3)xarm
python ./pybullet_robots/xarm/xarm.py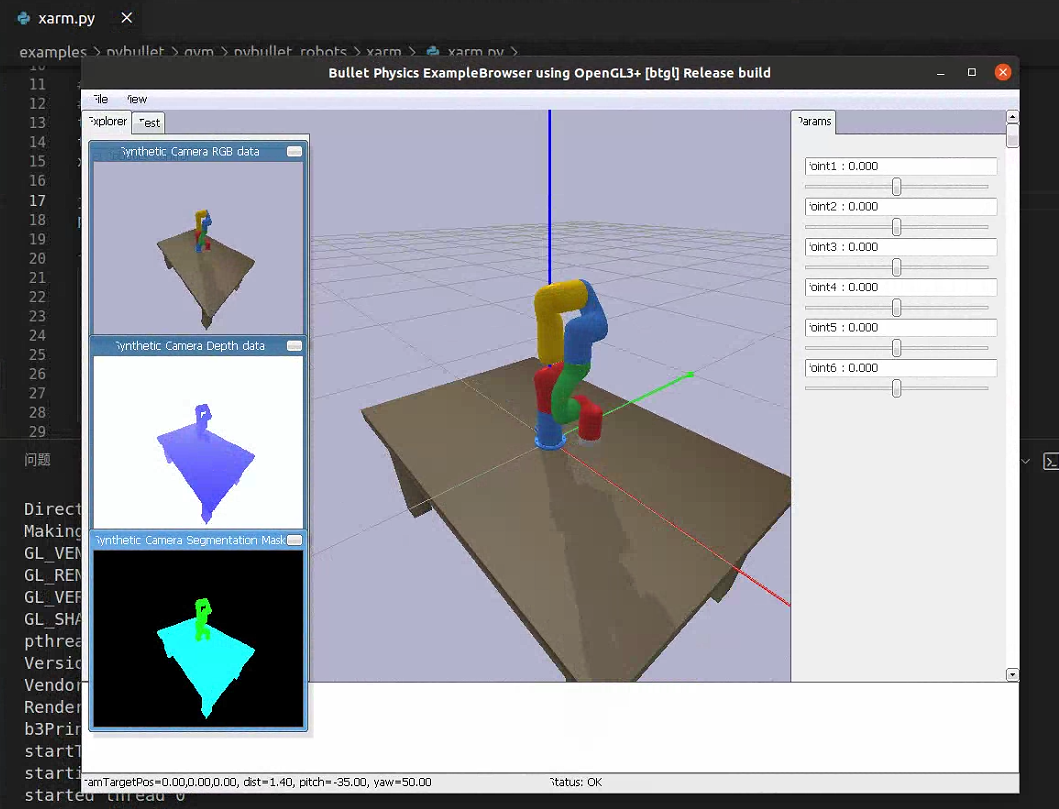
python ./pybullet_robots/xarm/loadxarm_sim.py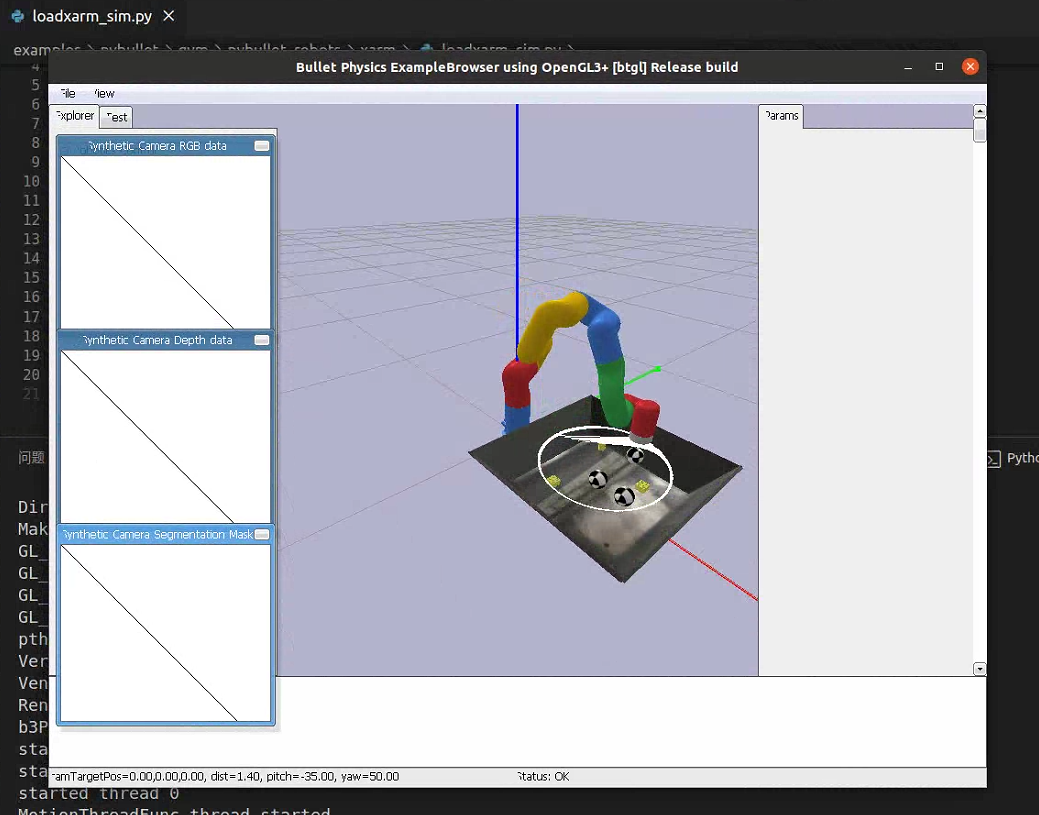
2、pybullet_examples
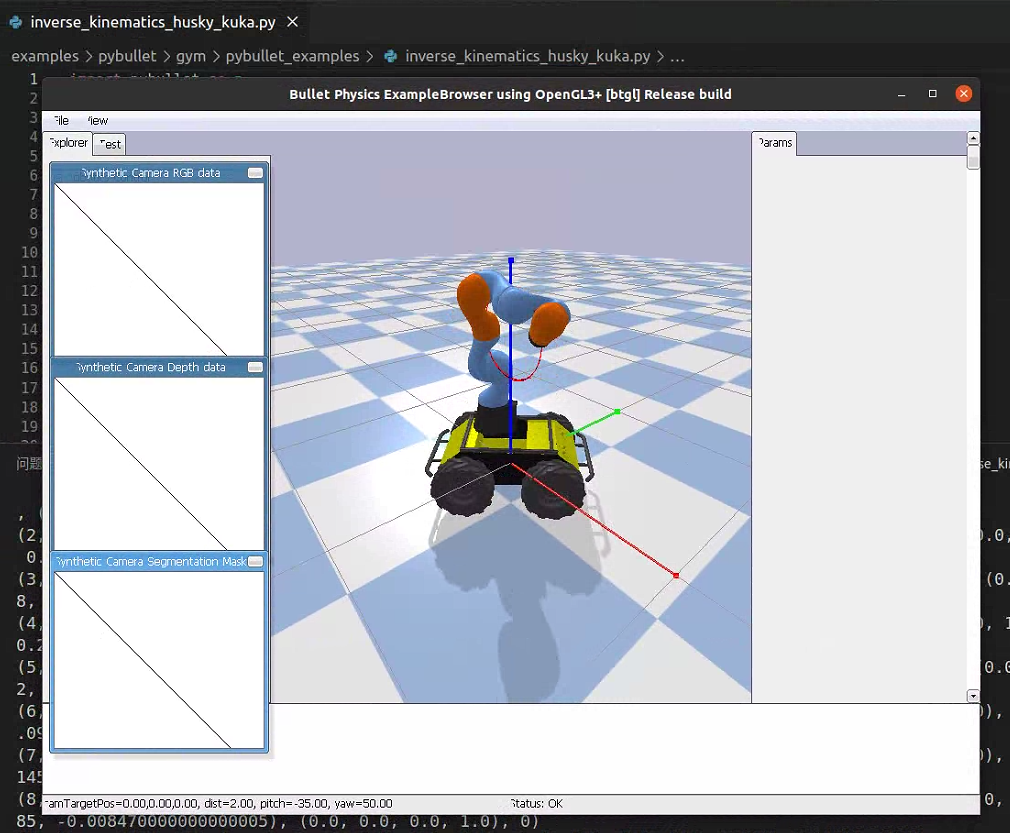
python ./pybullet_examples/inverse_kinematics.py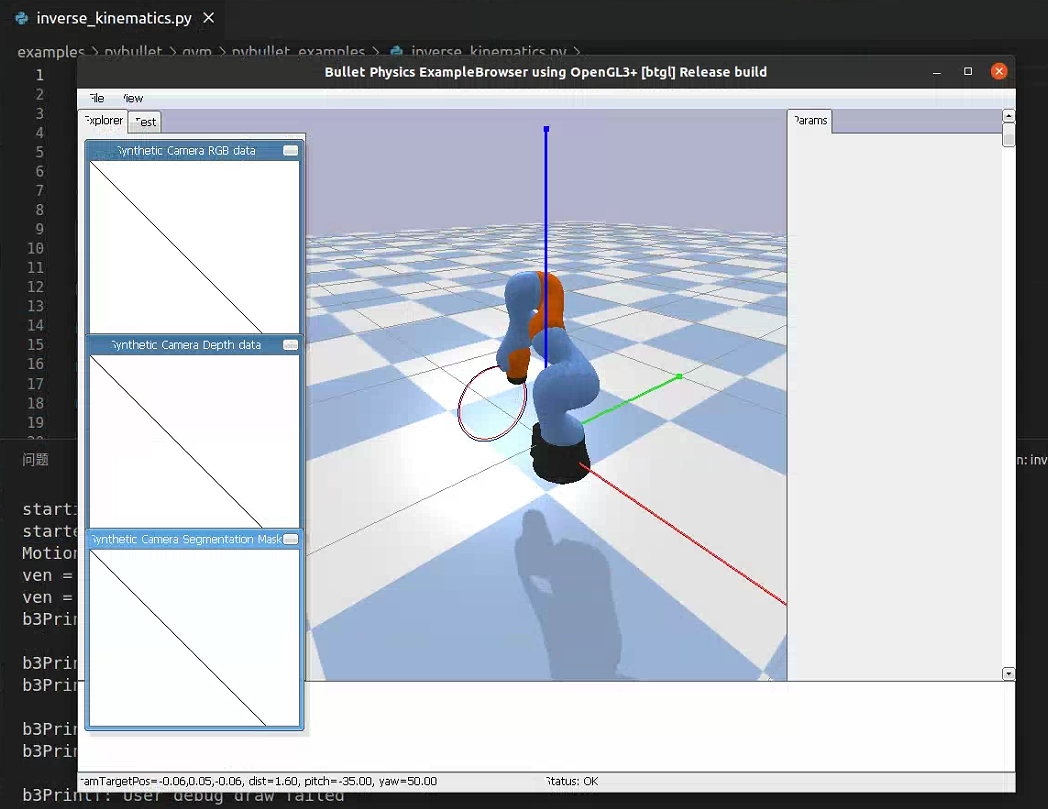
python ./pybullet_examples/inverse_kinematics_husky_kuka.py