点云(Point Cloud)介绍
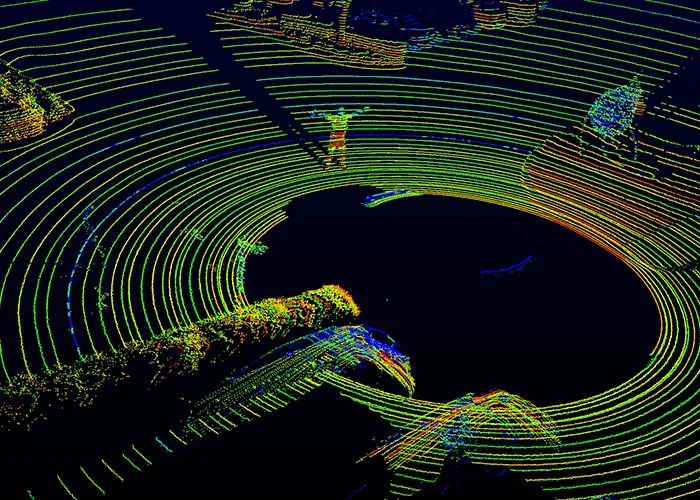
点云是三维空间中一组离散点的集合,每个点通常包含三维坐标信息(X,Y,Z),有时还包含其他属性如颜色(RGB)、强度、法向量等。点云是三维感知和建模领域的基础数据类型。
基本概念
-
数据结构:无序的点集合,每个点独立存在
-
表示方式:
-
原始点云:直接采集的离散点
-
网格化点云:通过三角网格连接点
-
体素化表示:将空间划分为规则小立方体
-
点云获取方式
| 采集设备 | 原理 | 特点 |
|---|---|---|
| 激光雷达(LiDAR) | 激光测距 | 高精度,室外适用 |
| 深度相机(如Kinect) | 结构光/TOF | 室内适用,成本低 |
| 摄影测量 | 多视角图像重建 | 需要后期处理 |
| 工业CT扫描 | X射线断层扫描 | 高精度内部结构 |
点云处理流程
-
采集:通过传感器获取原始点云
-
预处理:
-
去噪:去除异常点
-
滤波:平滑处理
-
下采样:减少数据量
-
-
配准:将多视角点云对齐到统一坐标系
-
分割:将点云分成有意义的区域
-
特征提取:提取关键点和描述子
-
分类识别:识别对象类别
-
三维重建:生成连续表面模型
点云应用领域
-
自动驾驶:环境感知、障碍物检测
-
机器人:SLAM、物体抓取
-
测绘:地形建模、建筑物重建
-
工业检测:零部件质量检查
-
医疗:牙齿/骨骼扫描
-
文化遗产:文物数字化保护
-
虚拟现实:场景建模
点云处理工具
-
开源库:
-
PCL (Point Cloud Library):最全面的点云处理库
-
Open3D:轻量级且高效的库
-
CGAL:计算几何算法库
-
-
商业软件:
-
CloudCompare
-
MeshLab
-
Autodesk ReCap
-
-
深度学习框架:
-
PointNet/PointNet++
-
PointCNN
-
KPConv
-
点云数据格式
-
通用格式:
-
PLY:支持颜色和法向量
-
PCD:PCL专用格式
-
LAS/LAZ:激光雷达标准格式
-
-
其他格式:
-
OBJ:支持点云和网格
-
XYZ:纯文本坐标
-
E57:通用3D数据格式
-
技术挑战
-
数据量大(百万级点)
-
无序性导致传统CNN难以直接处理
-
噪声和缺失数据问题
-
实时处理要求(如自动驾驶)
-
多源数据融合