课时一 平面机构的自由度与速度分析(上)
1、机器、机构与机械的关系
1)基本概念
(1)机械:机械式机器和机构的总成
(2)机构:机构是用来传递与变换运动和力的可动装置
(3)机器:机器是根据某种要求设计的执行机械运动的装置,可用来变换或传递能量、物料和信息
2)机器和机构的区别和联系
机器与机构都是多个实物的组合体、按照给定连接方式与运动规律作相对运动。此外,机械还可以用来变换或传递能量、物料和信息。
2、机构的基本概念
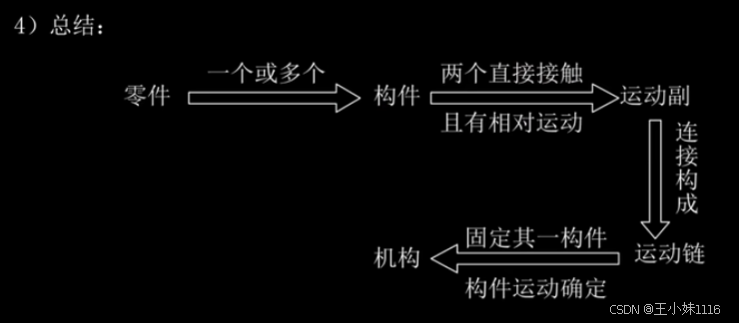
1)零件和构件
(1)概念:零件是制造的单元;构件是运动的单元,是一或多个零件组成的刚性连接体--不可动
(2)示例:齿轮既可以是一个零件也可以是一个构件;连杆是一个构件但不是一个零件,由多零件组合在一起。

2)运动副和运动链
(1)运动副
①概念:两构件直接接触而组成的可动连接
②分类:a、按照相对运动方式:平面副--平面运动;空间副 空间运动--构件1和构件2不在一个平 面
b、按接触方式:低副--面接触;高副--点或线接触
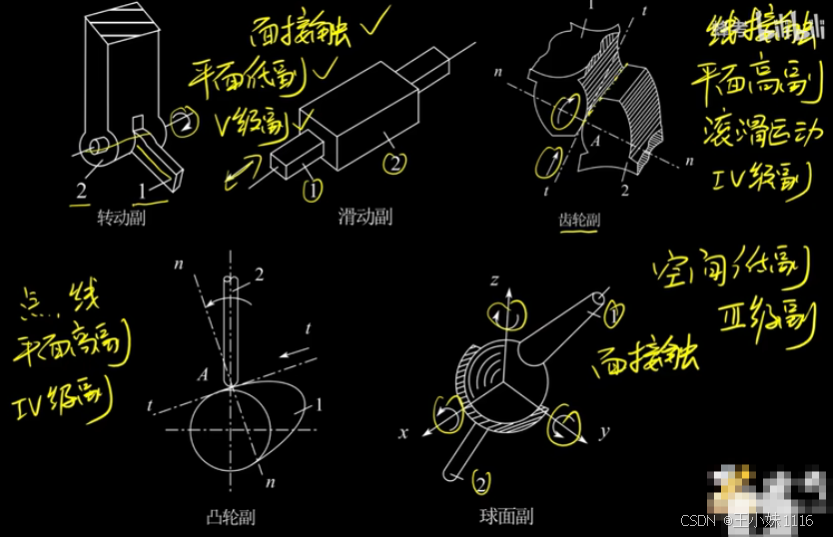
c、按运动形式:转动副、滑动副、齿轮副、凸轮副、球面副
d、按引入约束数:Ⅰ级副 引入一个约束;Ⅱ级副 引入两个约束;Ⅲ、Ⅳ、Ⅴ级约束依 次类推;由空间机构的6个自由度可知,Ⅵ级副是固定死的不可动,因此不存在Ⅵ级副。
空间机构的自由度一共有6个,X、Y、Z轴向的移动和绕X、Y、Z轴的旋转。
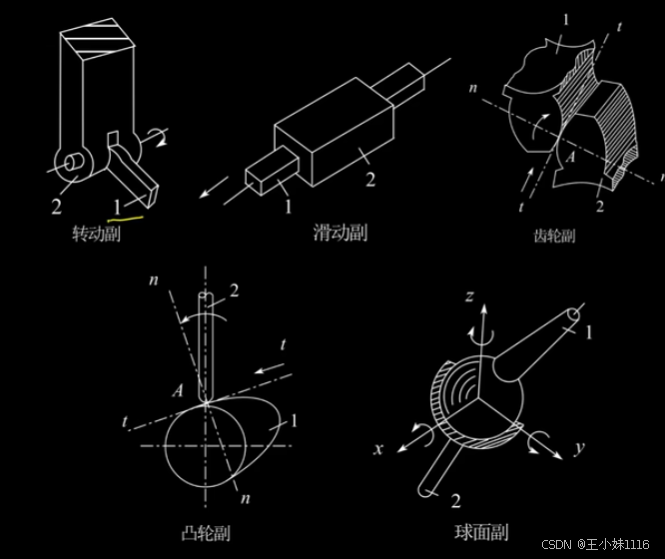
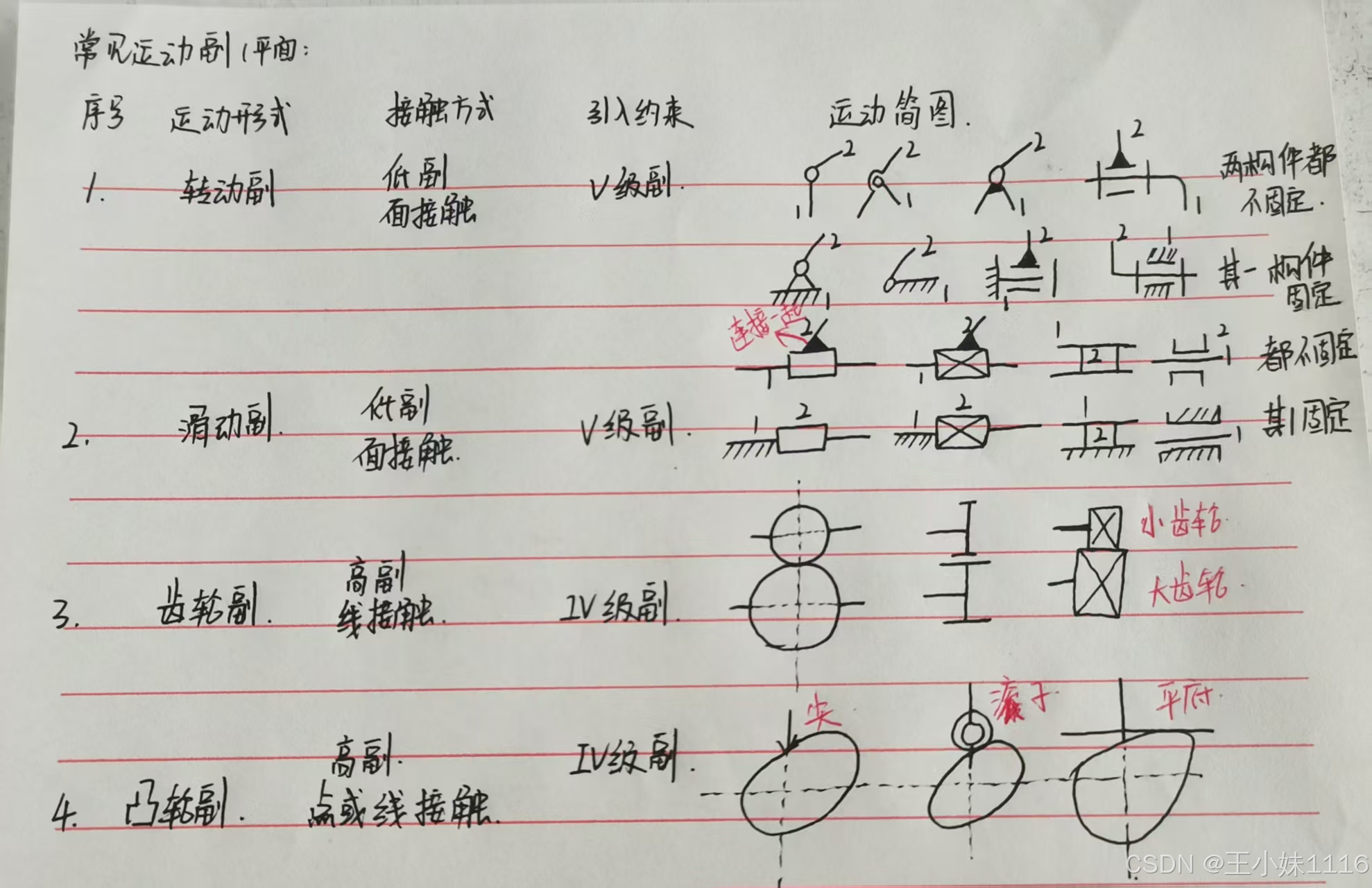
如图:1、转动副:平面低副--面接触,Ⅴ级副--只有一个方向的转动,相对运动是一个面--面接触
2、滑动副:平面低副--面接触,Ⅴ级副--只有一个方向的滑动
3、齿轮副:平面高副--线接触,Ⅳ级副--转动和滑动,滚滑运动
4、凸轮副:平面高副--点线接触,Ⅳ级副
5、球面副:空间低副--面接触,Ⅲ级副--三个方向的转动,构件1和构件2的运动不在一个 平面--空间副
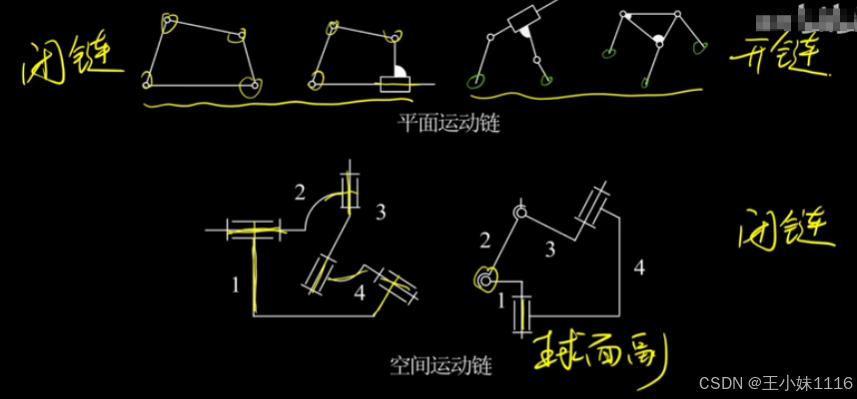
(2)运动链:
①概念:构建通过运动副连接而构成的可动系统
②分类:a、闭链:组成运动链的各个构件构成首尾封闭的系统;
开链:组成运动链的个构件未首尾封闭的系统
b、平面运动链:构件的相对运动为平面运动
空间运动链:构件的相对运动为空间运动
3)机构
(1)概念:机构是具有确定相对运动的构件组合体
机构组成:a、机架:必有且唯一的固定构件
b、原动件:具有独立运动规律的构件---活动构件
c、从动件:其余活动构件-------------------活动构件
零件:制造单元;构件:运动单元;
平面自由度F=3,最多有两个约束的运动副是平面低副----移动副、转动副
3、机构具有确定运动的条件
1)机构的自由度
(1)概念:机构具有确定运动需要添加独立运动规律的构件的数量称为自由度
(2)机构具有确定运动的条件:机构原动件的数量等于机构自由度时,机构具有确定的运动
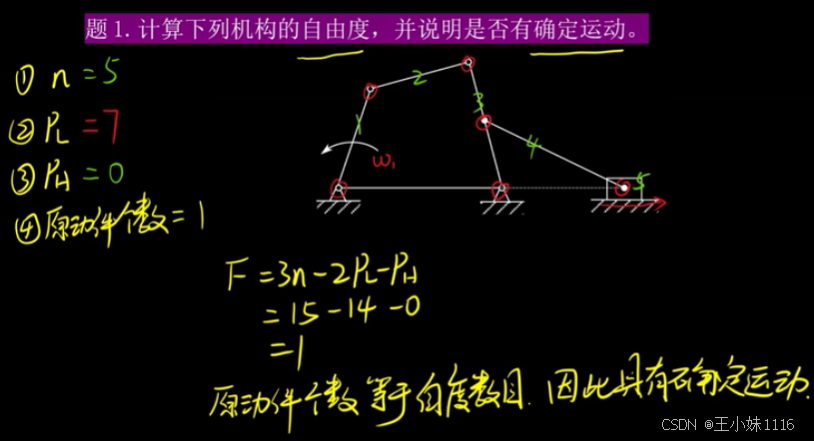
2)平面机构自由度的计算
平面运动的活动构件n都有三个自由度F--XOY平面,X和Y轴的移动以及绕Z轴的转动。
单个平面低副(转动副、滑动副)PL引入两个约束--F=3n-2PL;
单个平面高副(齿轮副、凸轮副)PH引入一个约束--F=3n-PH;
因此:F=3n-2PL-PH N代表所有构件的数量(活动构建和机架)N=n+1
注:运动件个数等于自由度数目==》具有确定运动,在构件1有W1,因此构件1是原动件且只有这一个