汽车可变转向比系统的全面认识
一、什么是转向比?
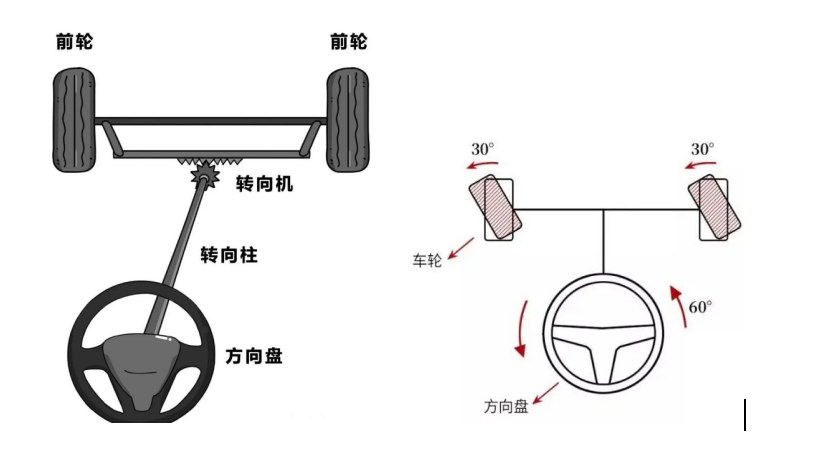
转向比又叫转向传动比,是指方向盘转向角度与车轮转向角度之比。
例如,方向盘向左转动了60°角,而车轮则向左转动了30°角,转向比就是2:1。
转向比越大,意味着要使车轮转向达到指定的距离,方向盘需要旋转的幅度就越大。在转向助力一样时,转向比越大旋转方向盘所需要的力度就越小,即是越省力。
相反地,转向比越小方向盘所需旋转的幅度越小,转向反应就越快,也就是常说的指向精准、操控好。
不同的用车场景往往需要不同大小的转向比,譬如汽车速度较低(泊车)或者转向角度较大时,提供较小的传动比会更方便;速度较高(跑高速)或者转向角度较小时,需提供较大的传动比,从而提高车辆的稳定性。
一般来说,大型车和货车的转向比较大,而家用车和运动型汽车的转向比较小。
二、转向比类型
1、传统固定转向比
在传统车辆中,方向盘转动角度与轮胎转向角度是固定比例(例如1:15,即方向盘转15度,轮胎转1度)。这种设计在低速时转向费力,高速时转向过于灵敏。
2、可变转向比
可变转向比(Variable Steering Ratio)即:可变轮胎与方向盘角度比值,指汽车转向系统中方向盘转动角度与轮胎实际转向角度之间的比例关系,且这一比例是可变的(非固定)。
通常,根据汽车速度和转向角度来调整转向器传动比,当汽车开始处于停车状态,汽车速度较低或者转向角度较大时,提供小的转向器传动比;而当汽车高速行驶或者转向角度较小时,提供大的转向器传动比,从而提高汽车转向的稳定性。
目前,此功能常见于高端车型或运动型车辆中,用于优化不同驾驶场景下的操控性能。
三、为什么选择可变转向比?
1、低速灵活性
减少方向盘转动圈数,停车、窄路调头更轻松。
低速时更小的转向比:方向盘转动较少即可实现较大轮胎转向(例如1:10),便于停车、掉头。
2、高速稳定性
降低方向盘敏感度,避免高速行驶中因微小操作导致车身晃动。
高速时更大的转向比:方向盘需转动更多角度才能实现较小轮胎转向(例如1:20),提升高速稳定性。
3、适应不同驾驶模式
运动模式下转向更直接,舒适模式下更平缓。
总之,可变转向比的实现不仅能提高车辆稳定性和安全性,还能增加操控乐趣。
四、可变转向比技术实现方式
目前技术中,一般会通过机械或电子系统动态调整方向盘与轮胎的转向比例的方式以实现。
1、机械式可变转向比
通过特殊齿条设计(如渐进式齿轮),使齿条密度在不同位置变化。
这主要是在“齿轮齿条机构”的“齿条”上做文章,通过特殊工艺加工齿距间隙不相等的齿条,这样方向盘转向时,齿轮与齿距不相等的齿条啮合,转向比就会发生变化,中间位置的左右两边齿距较密,齿条在这一范围内的位移较小,在小幅度转向时(例如变线、方向轻微调整时),车辆会显得沉稳,而齿条两侧远端的齿距较疏,在这个范围内,转动方向盘,齿条的相对位移会变大,所以在大幅度转向时(如泊车、掉头等),车轮会变得更加灵活。
这种技术除了对齿条的加工工艺要求比较严格之外,并没有多少“高科技”在其中,缺点在于齿比变化范围有限,并且不能灵活变化,而优势也很明显——完全的机械结构,可靠性较高,耐用性好,结构也非常简单。
示例:宝马早期的主动转向系统(使用行星齿轮组叠加转向角度)。
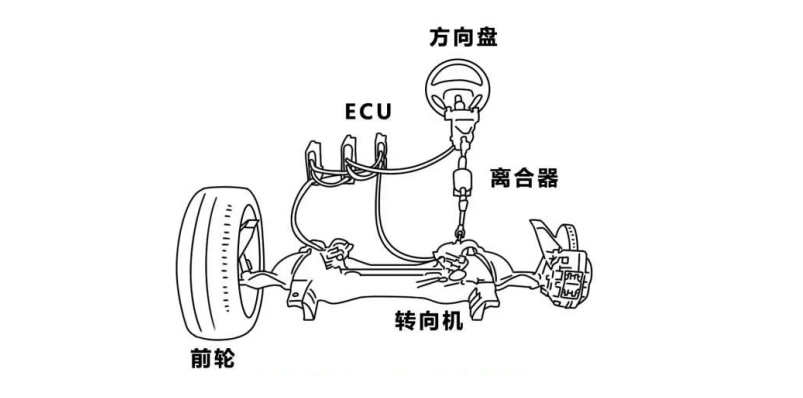
2、电子控制式可变转向比
通过传感器监测车速、转向角度等参数,由电控单元(ECU)实时调整转向比例。
此方式相比机械式可变转向比系统,使用了更复杂的机械结构并且需要与电子系统结合使用。能够更好的实现“低速时轻盈灵敏,高速稳健厚重”的需求,其为车辆行驶带来的便利性和稳定性都是普通的可变助力转向系统和单纯的“机械式”可变齿比转向无法比拟的。
示例:奥迪动态转向系统(Audi Dynamic Steering)、丰田可变齿比转向系统(VGRS)。
3、线控转向(Steer-by-Wire)
完全取消机械连接,方向盘与轮胎通过电信号控制,转向比可自由编程(如特斯拉Cybertruck、部分概念车)。