【ROS2】机器人操作系统安装到Ubuntu简介
主要参考: https://book.guyuehome.com/ROS2/1.系统架构/1.3_ROS2安装方法/
官方文档:https://docs.ros.org/en/humble/Installation.html
虚拟机与ubuntu系统安装
略,见参考文档
ubutun换国内源,略
1. 设置本地语言
确保您有一个支持UTF-8的语言环境。如果您处于最小环境(例如Docker容器),则该语言环境可能是最小的Posix。我们测试以下设置。但是,如果您使用不同的UTF-8支持的语言环境,那应该很好。
在Terminal命令段输入
locale # check for UTF-8sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # verify settings
2. 设置源
如遇报错“Failed to connect to raw.githubusercontent.com”,可参考https://www.guyuehome.com/37844
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
3. 安装ROS2
官方原文:https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html#install-ros-2-packages
ros-humble-desktop 包含 (Recommended): ROS, RViz, demos, tutorials.
ros-humble-ros-base 安装(Bare Bones):通信库,消息软件包,命令行工具。没有GUI工具。
ros-dev-tools 开发工具:编译器和其他构建ROS软件包的工具
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
sudo apt install ros-dev-tools
设置环境变量
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
案例测试
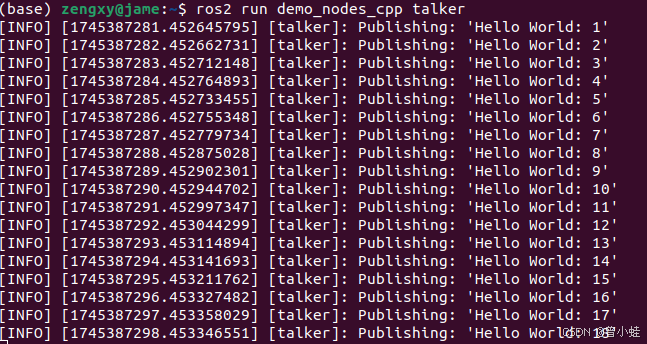
案例1 底层通信系统DDS
启动第一个终端,通过以下命令启动一个数据的发布者(talker)节点:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talker
启动第二个终端,通过以下命令启动一个数据的监听者节点:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener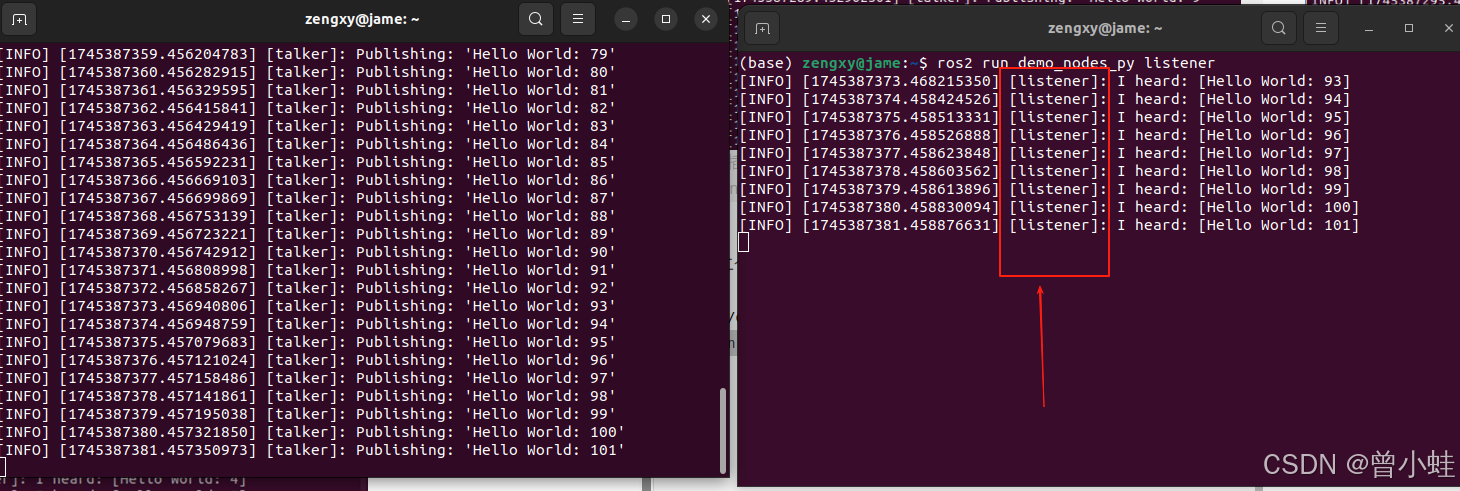
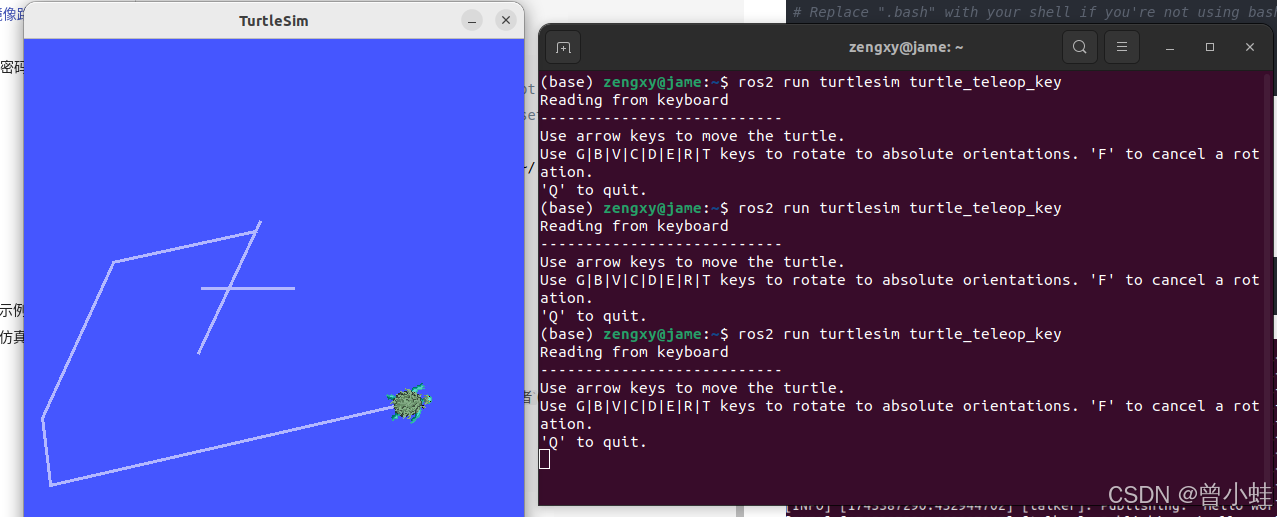
实例2 : 打开小海龟仿真器
一个端口,启动海龟模拟器
ros2 run turtlesim turtlesim_node
另一个端口,启动控制海龟端口
ros2 run turtlesim turtle_teleop_key