无穿戴动捕:突破穿戴式设备束缚,解锁更自由高效的动作捕捉体验
随着传感器技术,计算机视觉技术的不断发展,在动作捕捉领域,已经发展出了光捕、惯性动捕、视觉捕捉等多种人体动作捕捉方案,其中光捕有着高精度的独特优势,但是造价贵,成本高,惯性动捕虽然成本低,且有一定的捕捉精度,但是也少不了设备的束缚,主要用在数字人驱动,与动画动捕数据录制等方面,使用场景有一定的限制。
而无穿戴动捕的发明,正好解决了惯性动捕与光捕方面的缺憾,它成本适中,且不用穿戴设备就可以对人体进行动作捕捉,有着更加广泛的应用场景。
广州虚拟动力作为一家在动作捕捉领域深耕多年的公司,基于人工智能图像识别技术推出了偃动坊实时无穿戴动作捕捉系统,有着以下功能特征:
1、无需穿戴,无需标记点,通过摄像头视觉检测人体的关键节点位置信息,在最佳的捕捉环境下,可以实现人体关节自动捕捉成功率98%以上,可助力使用者解锁更自由,更高效的动作捕捉体验。
2、支持双人动捕,在摄像头覆盖的范围内,可以实时捕捉双人互动动作,提供动作数据精度与动作捕捉效率。
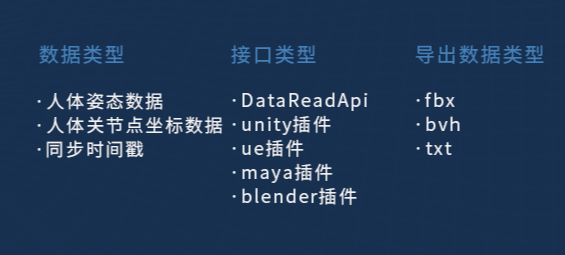
3、系统配备丰富的开发接口,可以根据用户的具体需求定制化开发合作方案。
适用场景广泛:
在运动分析领域:可以通过无穿戴动作捕捉技术,捕捉运动员、舞者等在自然条件下的动作,通过导出专业的人体三维运动数据为制作个性化的训练方案做坚实的数据支撑。
在人机工程领域:可以通过无穿戴动作捕捉技术快速获取真人运动数据构建人形机器人训练数据集,在无设备穿戴的情况下进行人形机器人的遥操作,可以让机器人学习到高精度的真人动作,从而促进人形机器人动作迈向高度拟人化的进程。
在文化娱乐领域:无穿戴动作捕捉系统搭配数字人实时驱动软件,可以在无任何设备穿戴的情况下实现虚拟人的实时驱动,可用于虚拟人直播,解锁更加自由的表演体验,还可以用于文旅景区,展厅展馆,娱乐影院等场所打造沉浸式互动体验空间,提升场所吸引力。