基于霍尔效应传感器的 BLDC 电机梯形控制方案详解
基于霍尔效应传感器的 BLDC 电机梯形控制方案解读
使用霍尔效应传感器的无刷直流(BLDC)电机梯形控制
一、系统核心架构与技术优势
(一)BLDC 电机与霍尔传感器控制原理
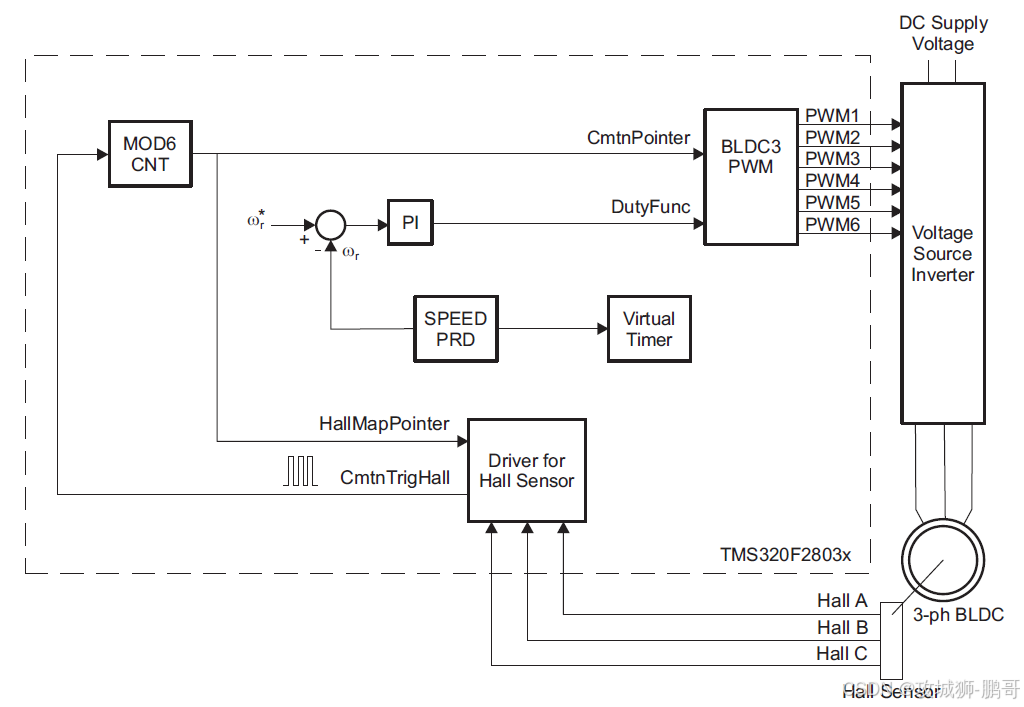
BLDC 电机作为永磁同步电机的一种,其核心特征是转子反电动势为梯形波,定子电流为 120° 电角度宽度的矩形波。霍尔效应传感器通过检测转子位置,提供三相正交信号(A、B、C),每个信号周期为 180° 电角度,相位差 120°,从而确定 6 个换相点(每 60° 电角度一次换相)。这种位置检测方式为逆变器提供精确的换相时刻,确保定子磁场与转子永磁体的同步旋转。
关键公式:
反电动势(Bemf): E = 2 N B r ω E = 2NBr\omega E=2NBrω
N N N:每相绕组匝数, B B B:磁通密度, r r r:转子半径, ω \omega ω:电角速度。反电动势与转速成正比,是速度控制的核心参数。
电磁转矩: T = 4 N π B r I T = \frac{4N}{\pi}BrI T=π4N