RDK X3新玩法:超沉浸下棋机器人开发日记
一、项目介绍
产品中文名:超沉浸式智能移动下棋机器人
产品英文名:Hackathon-TTT
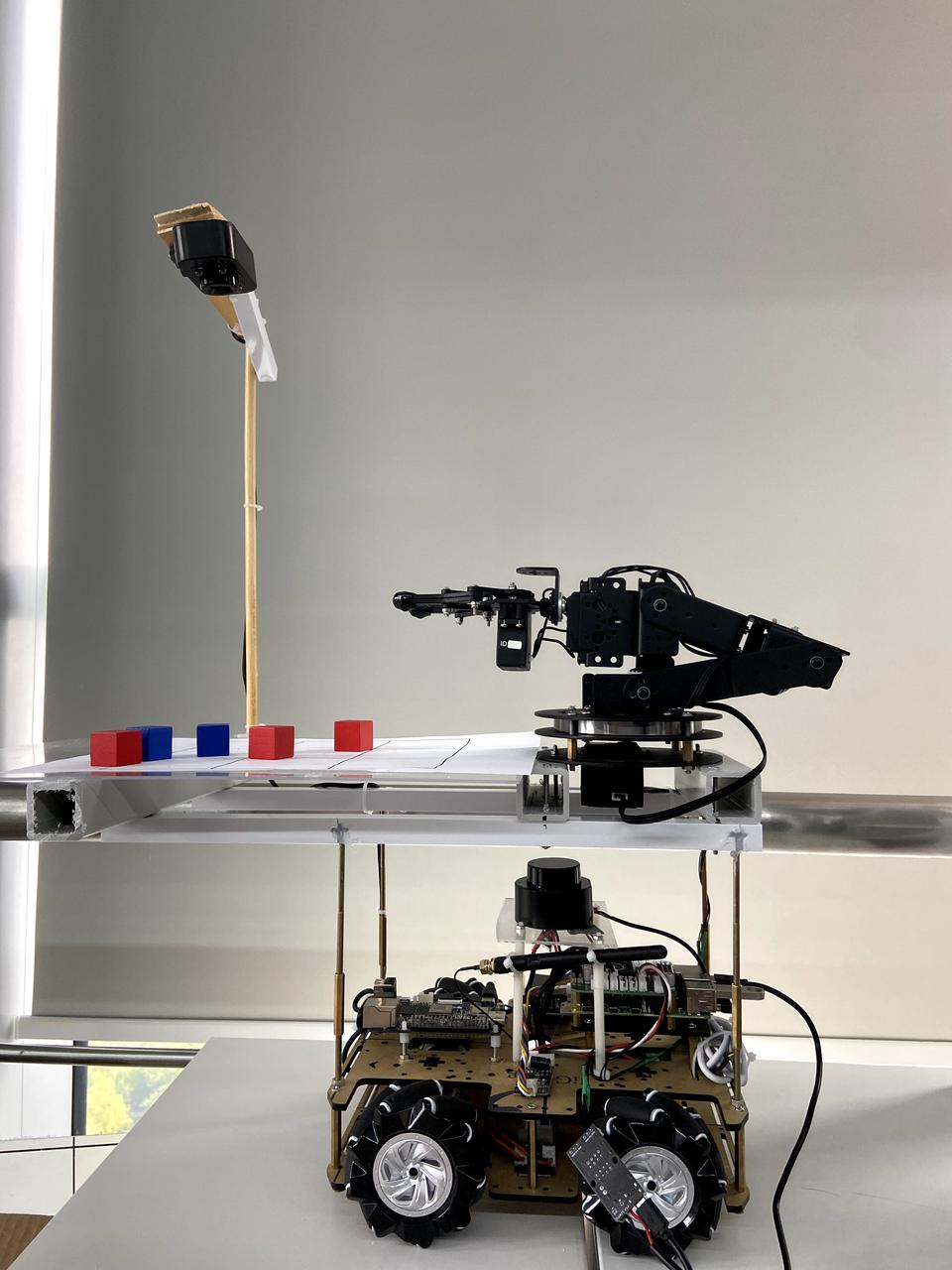
产品概念:本项目研发的下棋机器人,是一款能自主移动、具备语音交互并能和玩家在真实的棋盘上进行“人机博弈”的移动下棋平台,能够带给对弈者如同真人对弈的完美沉浸式体验——棋开得胜团队。
该智能下棋机器人具备3个显著优点:
- 真实棋盘棋子对弈:通过使用真实棋子、棋盘和机械臂,给对弈者带来超沉浸式体验
- 语音交互:能够进行智能语音交互,增强对弈乐趣。
- 自主移动:能够自主移动到预约下棋人地点开展对弈。
相对于传统的固定式下棋平台,使用场景更加广泛,智能化水平更高,体验感更强。该平台融合了传统棋艺和现代科技,集益教、娱乐、陪伴为一体,是您提升棋艺、陪伴老人、培养孩子的首选。
用户群体:喜欢下棋的朋友,喜欢人工智能应用的朋友。
应用场景:公司、园区、 公园、家庭、酒店等。
二、整体方案设计
- 整体架构
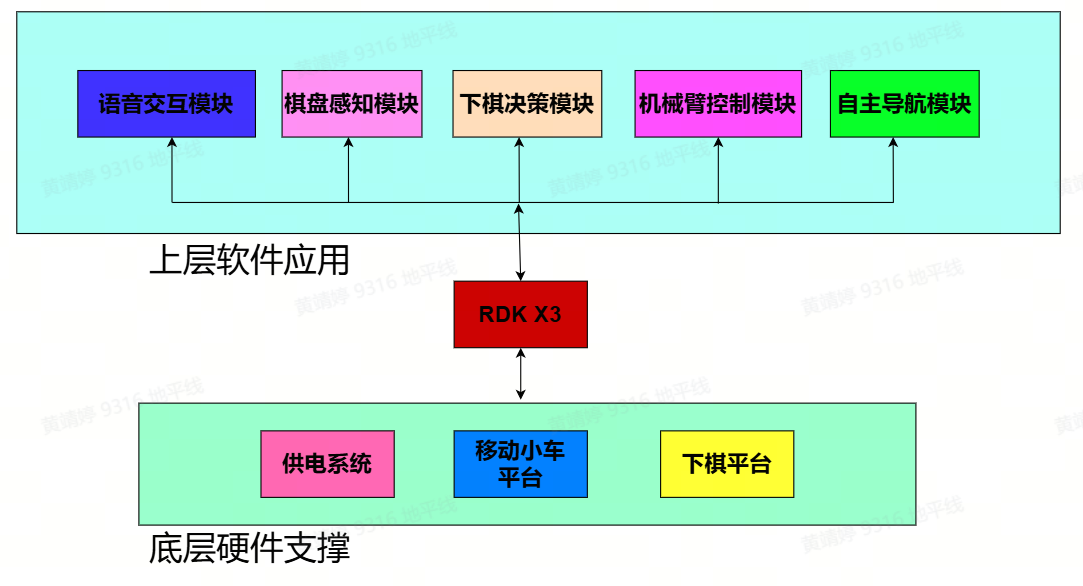
整个智能下棋平台的系统架构如下图所示,我们的全部模块都装在在一个移动小车平台上,并对其进行了大幅的改造,整体系统架构图如下所示。其可分为上层应用、主控和底层支撑3部分,底层支撑部分包括7.4V锂电池、小车平台以及下棋平台;主控部分为RDK X3,所有的上层应用均运行于其上;上层应用部分分为四大块,分别是语音交互模块、棋盘感知模块、机械臂控制模块以及自主导航模块。
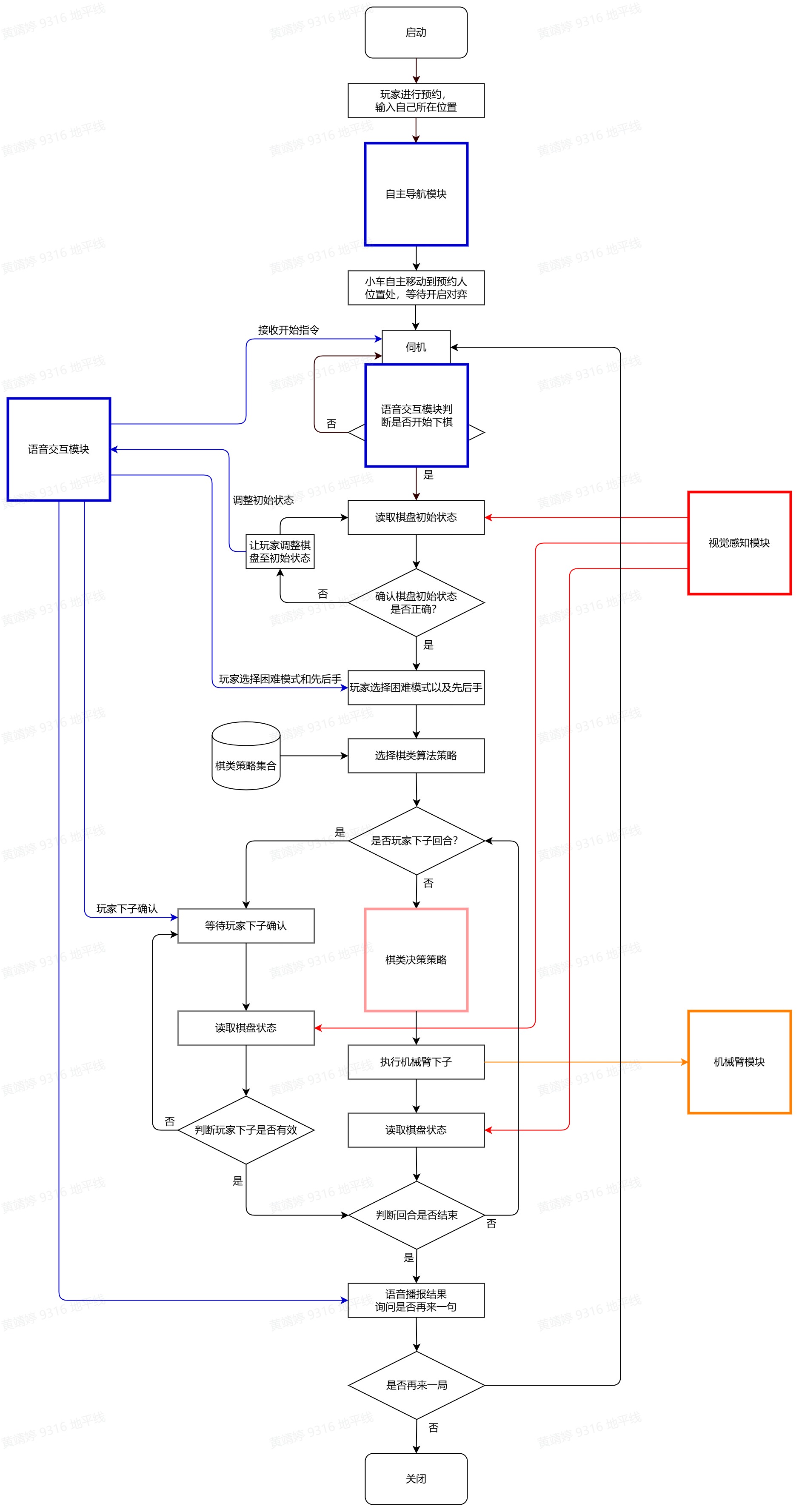
基于上述架构,整个系统的运行流程图如下所示:
- 硬件架构设计
基于上述整体架构设计,本项目设计的硬件架构如下图所示:
暂时无法在飞书文档外展示此内容
硬件方面包含如下几个部分:
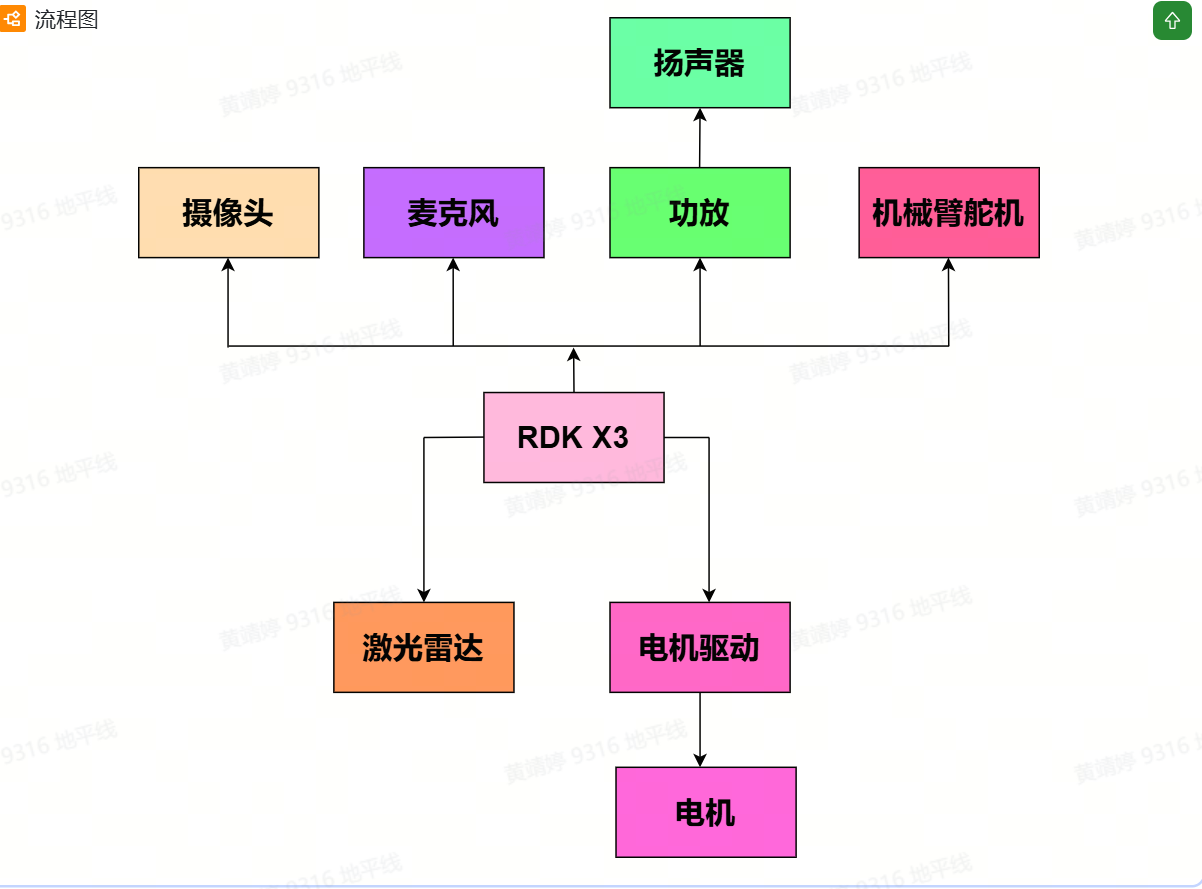
- 主控设备:RDK X3负责各类软件的部署和实现。
- 电机驱动和电机:由RDK X3输出PWM控制信号负责控制小车的运动。
- 激光雷达:激光雷达通过USB连接到RDK X3上,进行建图和定位。
- 摄像头:通过USB连接到RDK X3上,负责监控棋盘状态。
- 麦克风、功放和扬声器:通过USB连接到RDK X3上,负责语音采样。
- 机械臂:通过串口总线连接至RDK X3上,由树莓派输出控制信号负责控制。
- 软件架构设计
基于上述硬件设备,本项目涉及的软件架构如下图所示,整体的软件架构基于TROS系统,各个子功能作为一个节点。
暂时无法在飞书文档外展示此内容
RDK X3上安装的是地平线的TROS,将各个模块的功能封装成一个TROS节点,各个节点负责实现的功能如下所述:
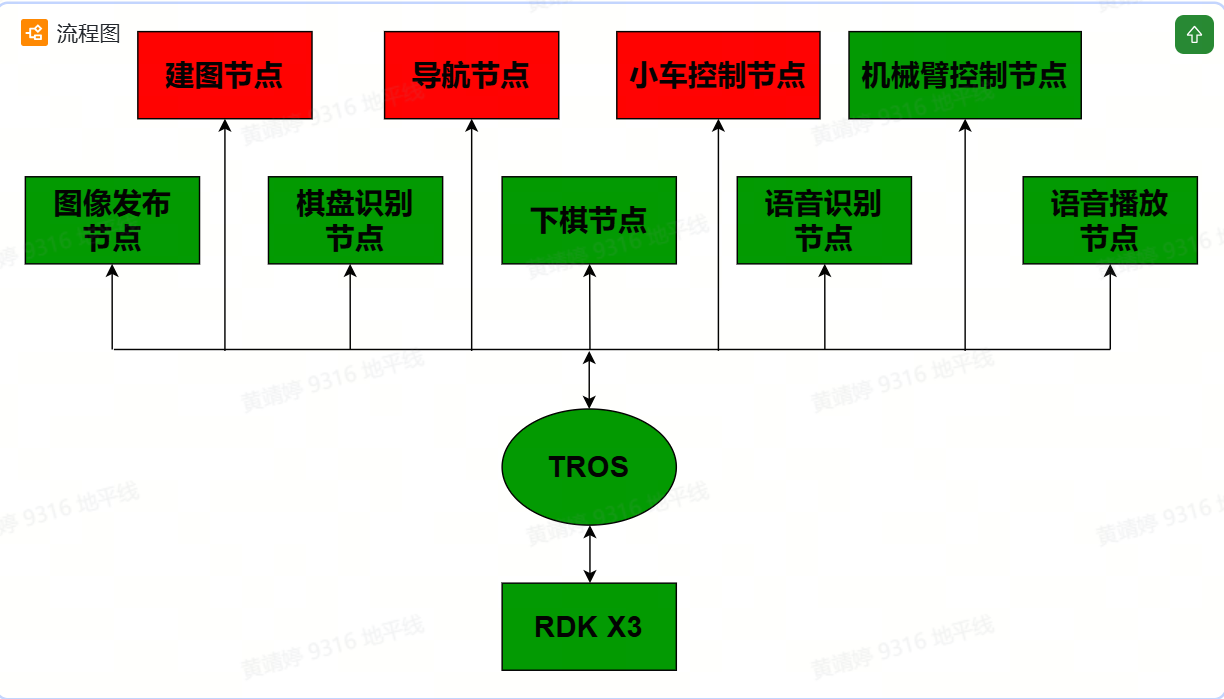
- 图像发布节点:负责采集摄像头图像并发布出去。
- 棋盘识别节点:负责接收图像话题并进行棋盘识别,然后发布棋盘识别结果。
- 下棋节点:接收棋盘识别结果和语音识别结果话题,并运行下棋程序,发布下一步的下棋动作。
- 语音识别节点:读取麦克风数据并进行语音识别,然后发布语音识别结果。
- 语音播放节点:接收语音识别结果,并播放想要的语音提示。
- 建图节点:负责进行建图并存储地图。
- 导航节点:进行定位和路径规划。
- 小车控制节点:接收导航节点的结果,并发出小车电机控制指令。
- 机械臂控制节点:接收下棋节点输出的结果,并控制机械臂执行取棋、放棋、复位的动作。