002 六自由度舵机机械臂——姿态解算理论
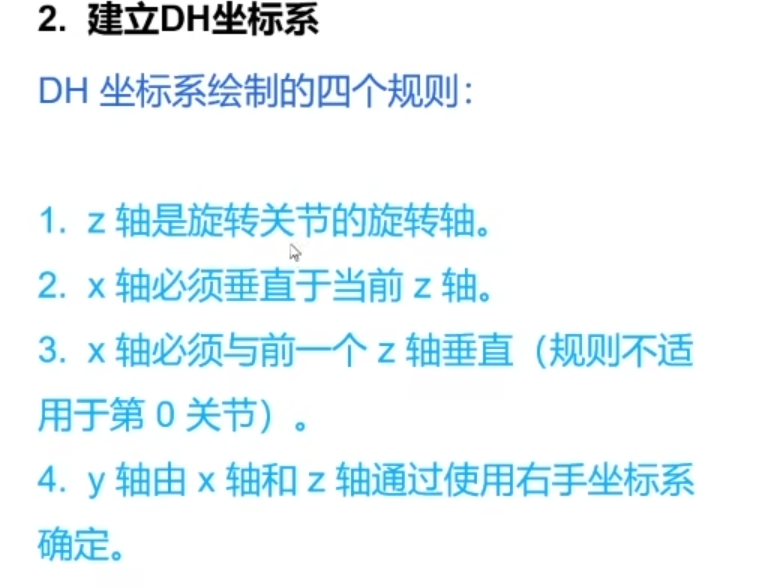
00 DH模型的核心概念
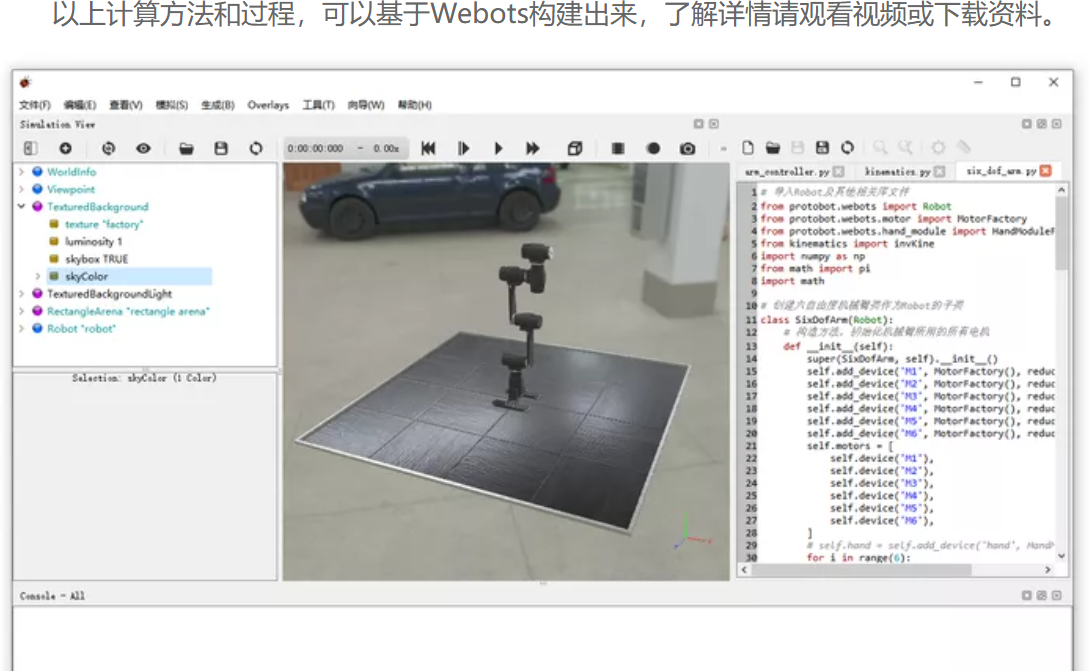
【全程干货【六轴机械臂正逆解计算及仿真示例】】
如何实现机械臂的逆解计算-机器谱-robotway
DH模型是机器人运动学建模的基础方法,通过四个参数描述相邻关节坐标系之间的变换关系。其核心思想是将复杂的空间位姿转换分解为绕轴旋转和平移的组合,简化运动学计算
四个关键参数
| 参数符号 | 物理意义 | 关联轴 | 变量类型 |
|---|---|---|---|
| θi | 绕Zi-1轴Xi-1与Xi之间的旋转角度 | 关节转动轴(Z_{i}) | 旋转关节的变量 |
| di | 沿Zi-1轴的Xi-1与Xi之间平移距离(连杆偏移) | 关节移动轴(Z_{i}) | 平移关节的变量 |
| ai | 沿Xi轴Zi-1与Zi之间的连杆长度 | 公垂线方向(X_{i}) | 固定几何参数 |
| αi | 绕Xi轴Zi-1与Zi之间的旋转角度(连杆扭转角) | 两Z轴夹角(X_{i}) | 固定几何参数 |
坐标轴的正方向为正
01 正运动学
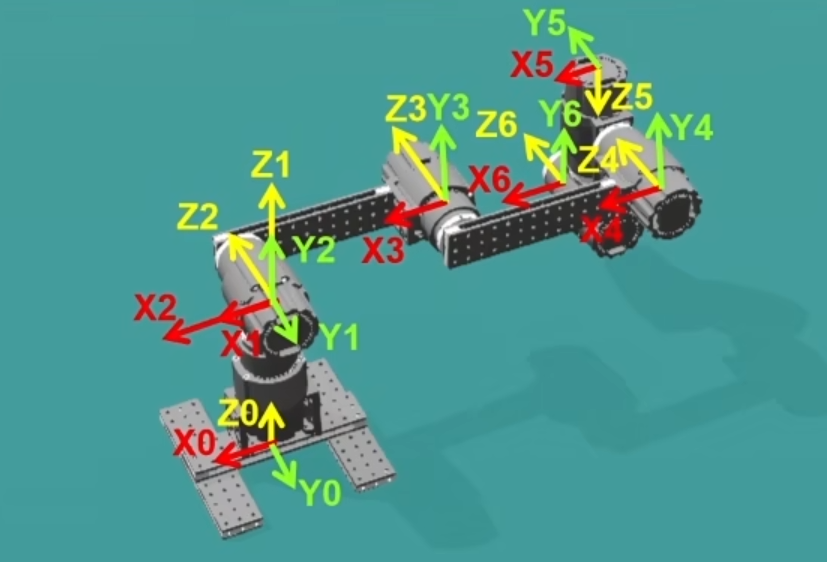
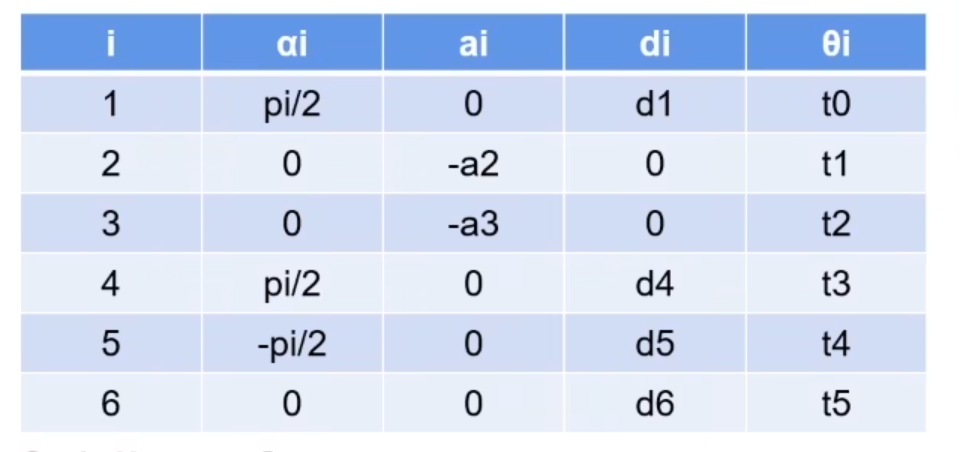
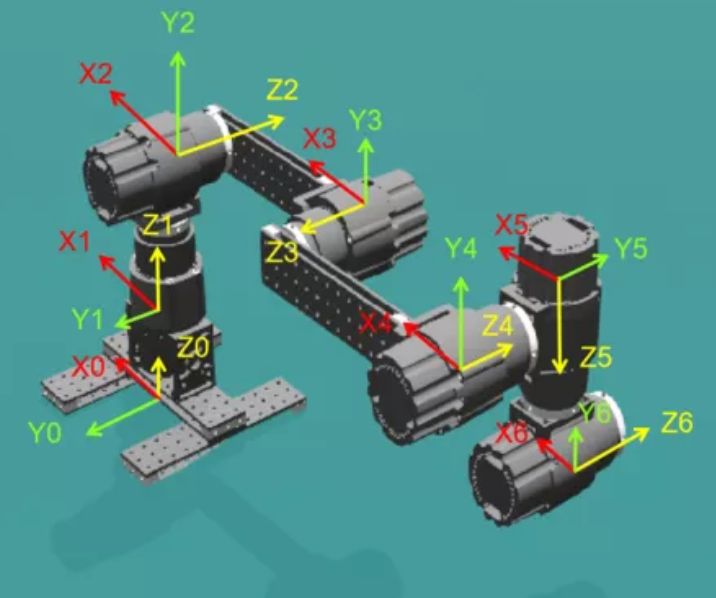
3.确定DH参数(di、θi、ai、αi)
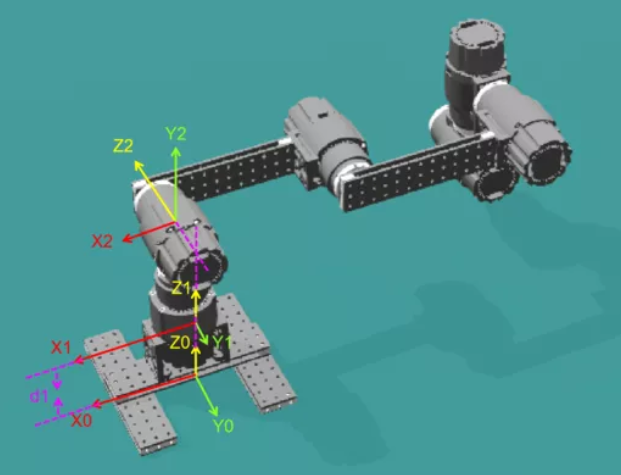
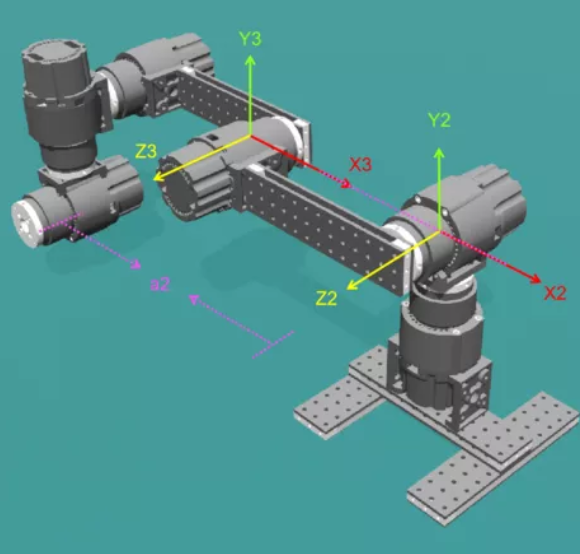
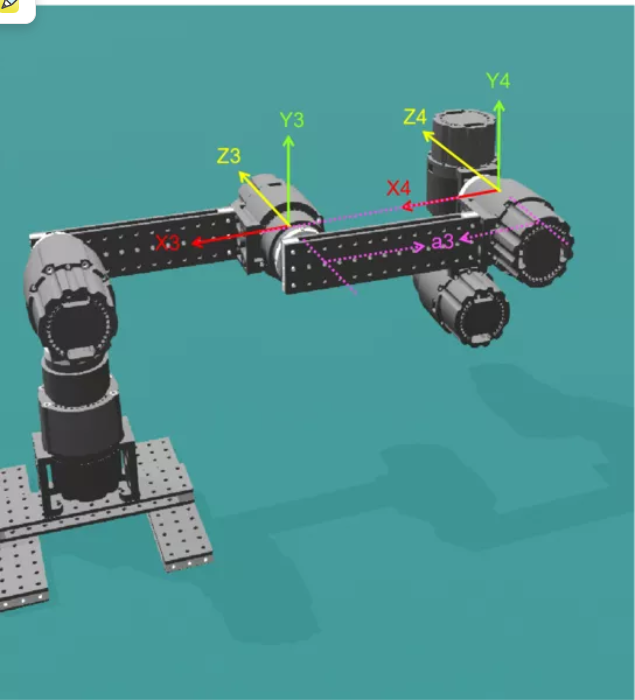
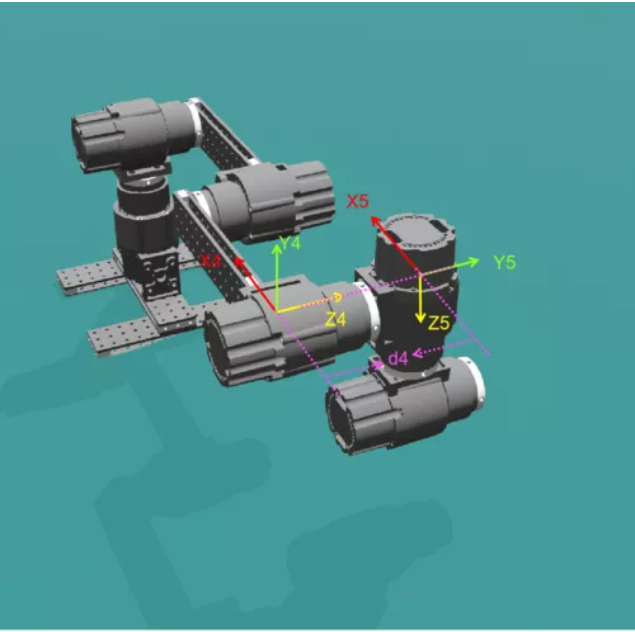
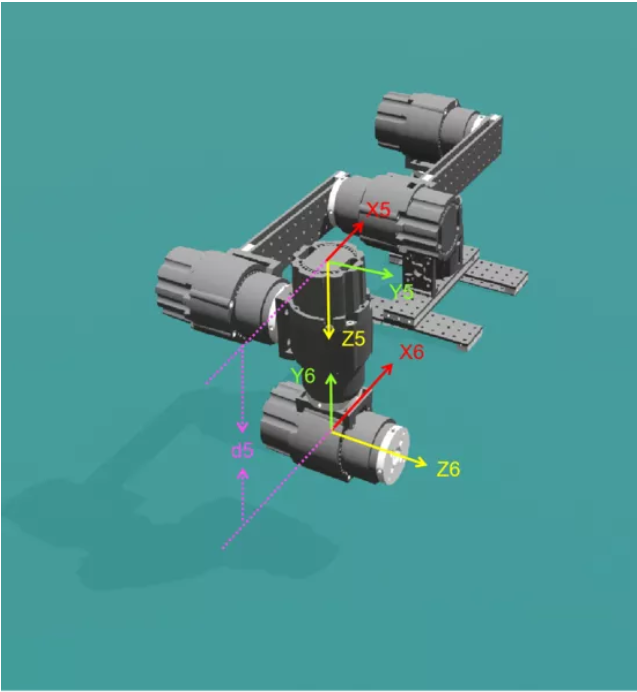
最后一个参数是最后一个轴到机械末端
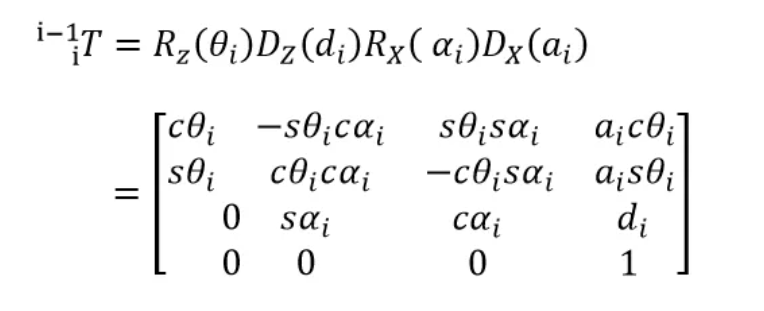
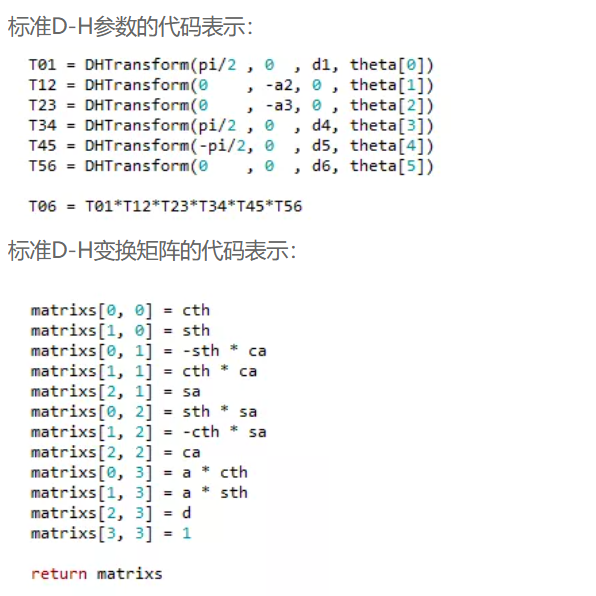
4.计算正向运动学
将上表中的标准D-H参数代入相邻坐标系的变换矩阵中,这个矩阵是标准D-H参数的变换矩阵,如果是改进型的D-H参数,则矩阵会有不同
5.仿真与实践
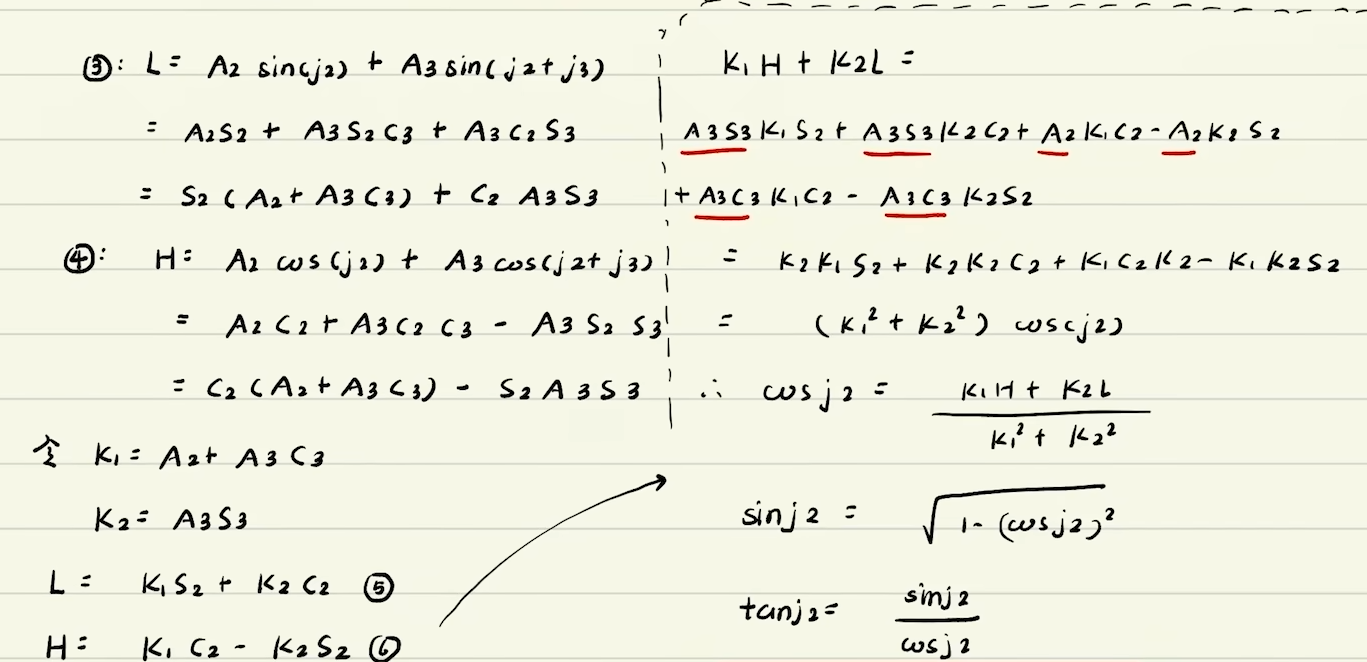
02 逆运动学
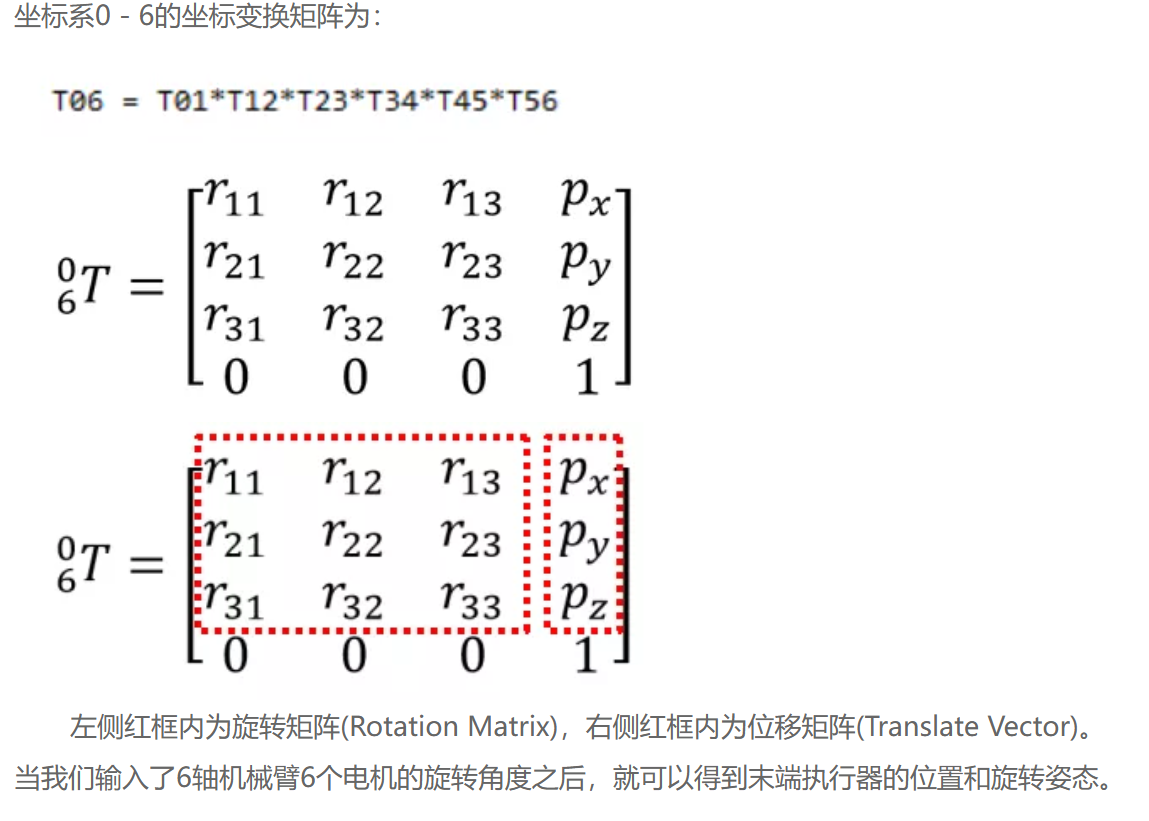
逆运动学则是根据已知的末端执行器的位置和姿态,计算机器人各个关节变量,也被称为机器人运动学求解
机械臂末端执行器的位姿 —–> 关节变量 = 逆向运动学
逆运动学的求解方法有两类:
(1)解析解法
① 代数法
② 几何法
(2)数值解法
① 迭代法
② 优化法
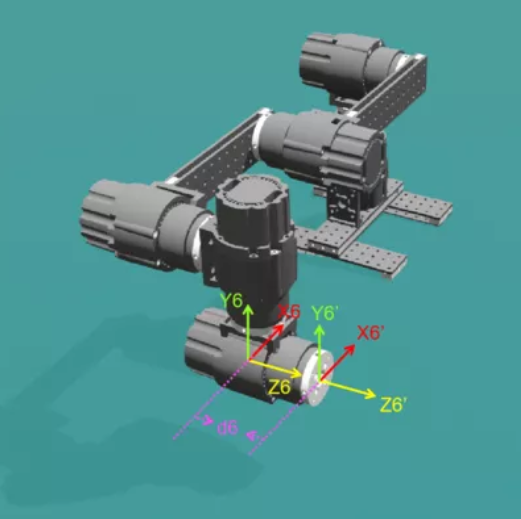
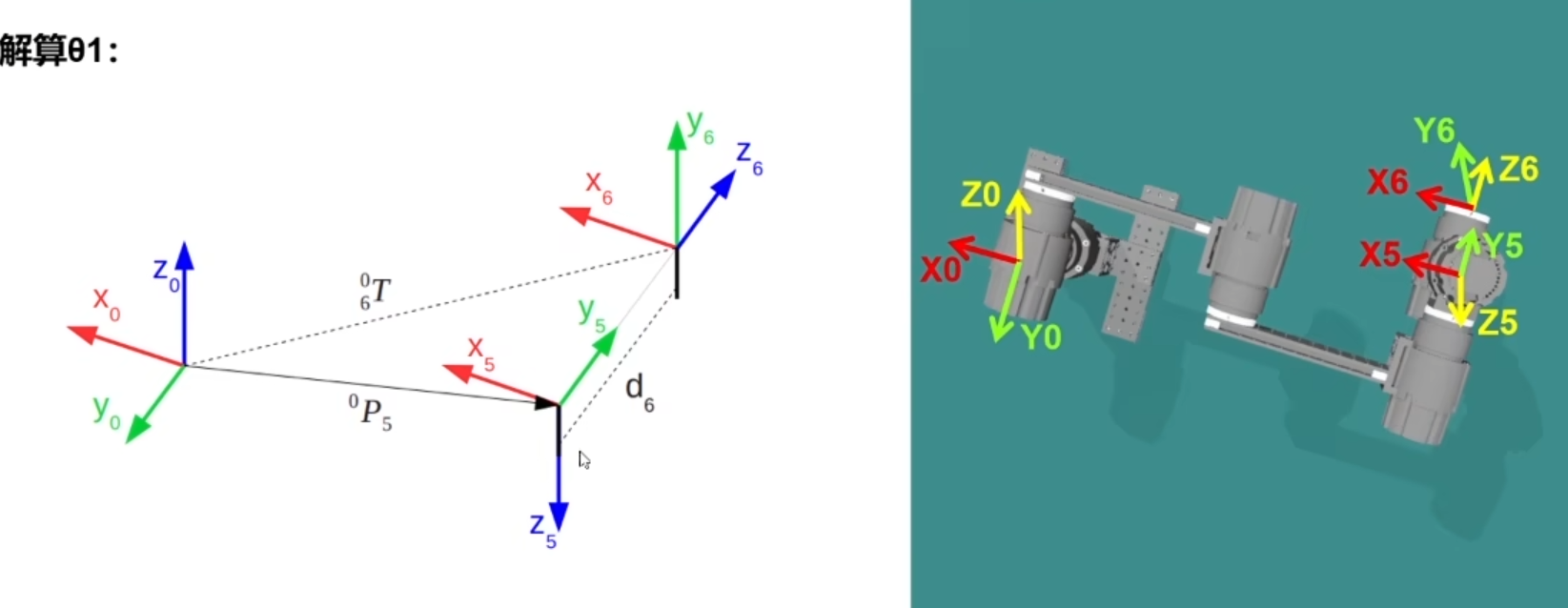
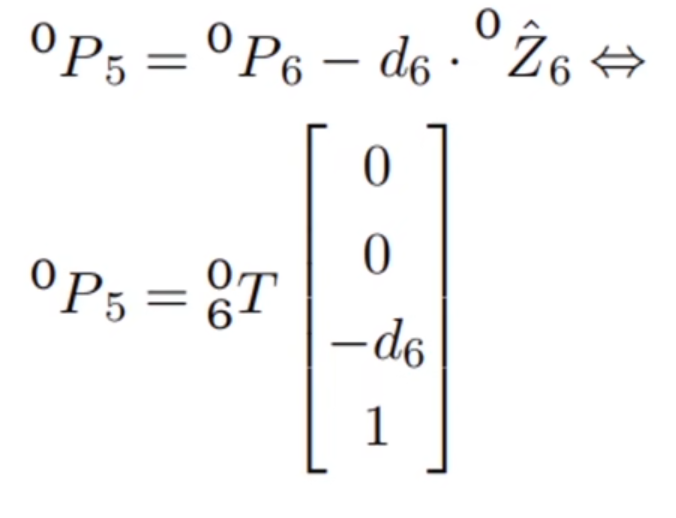
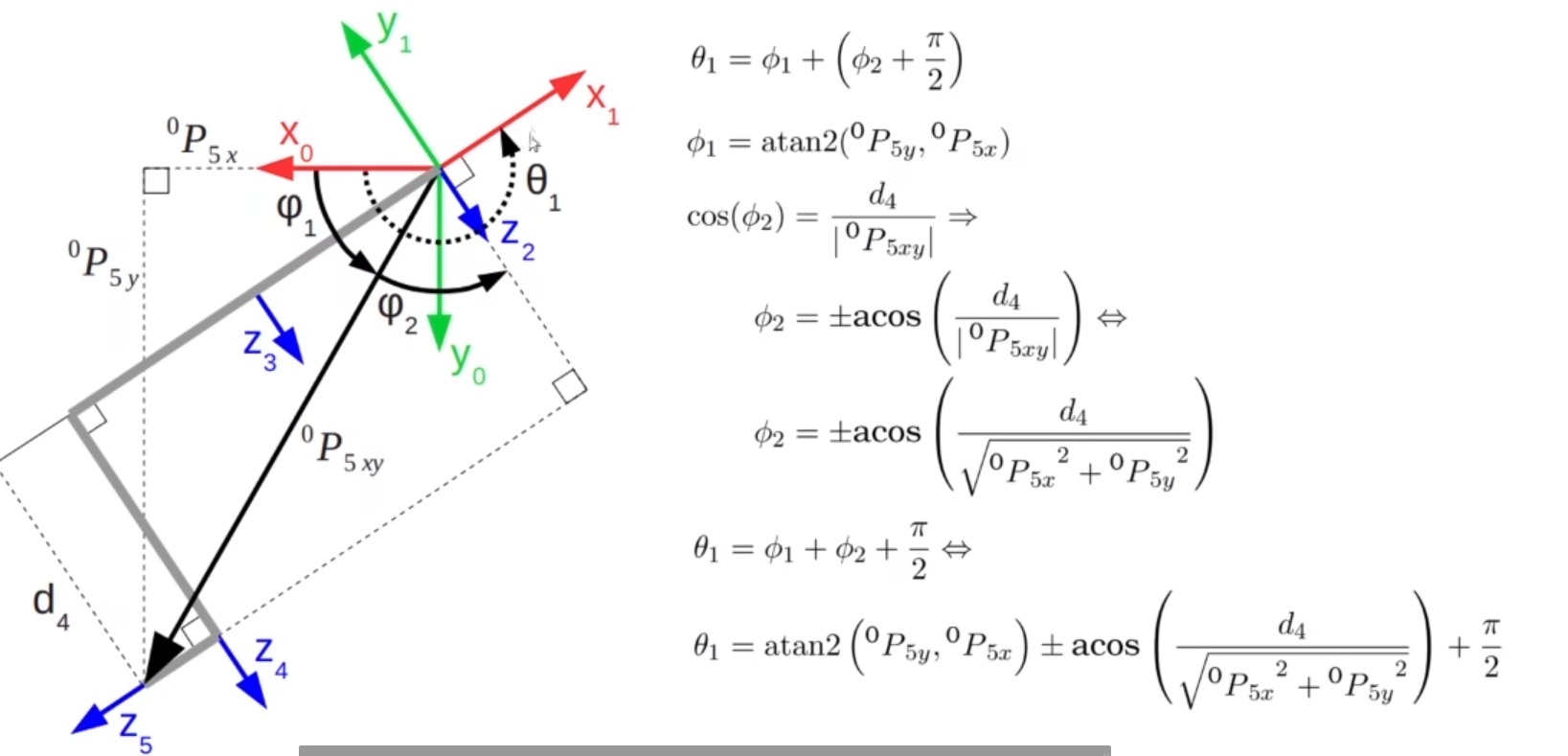
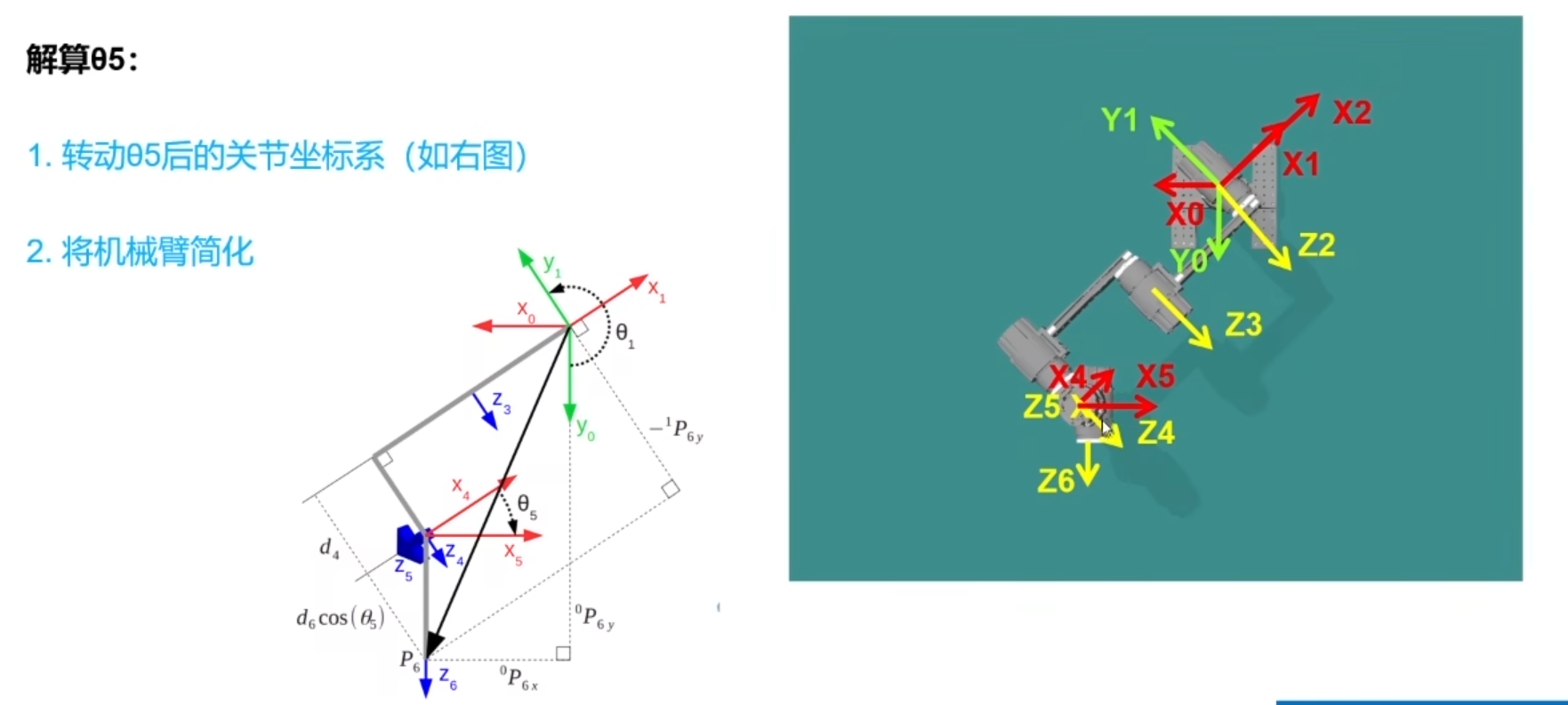
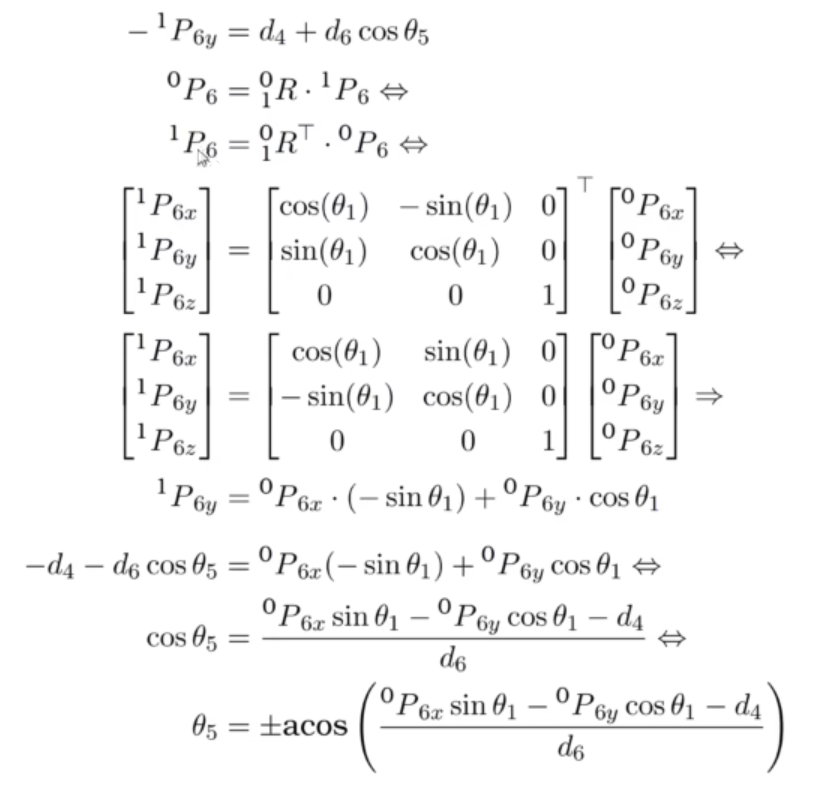
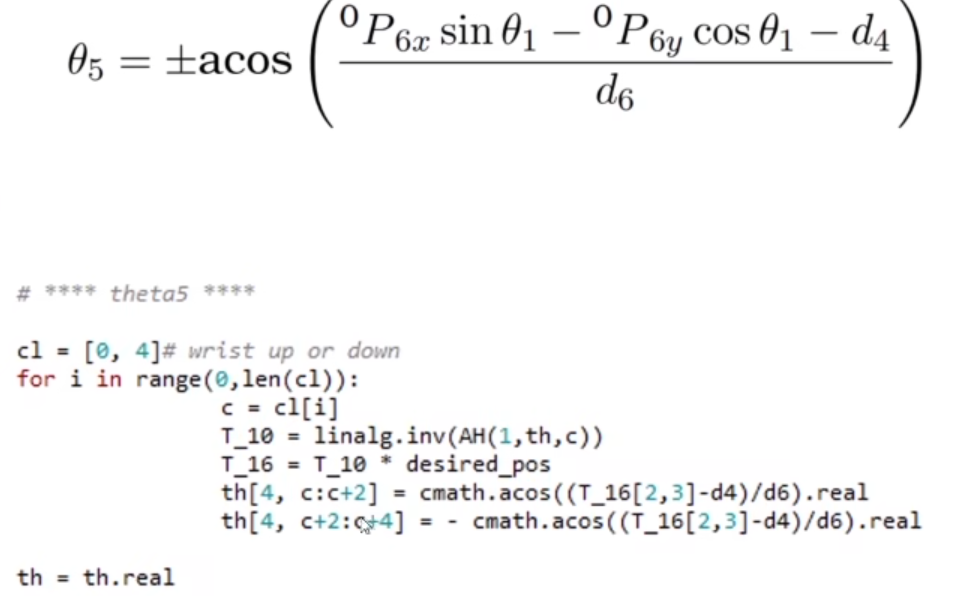
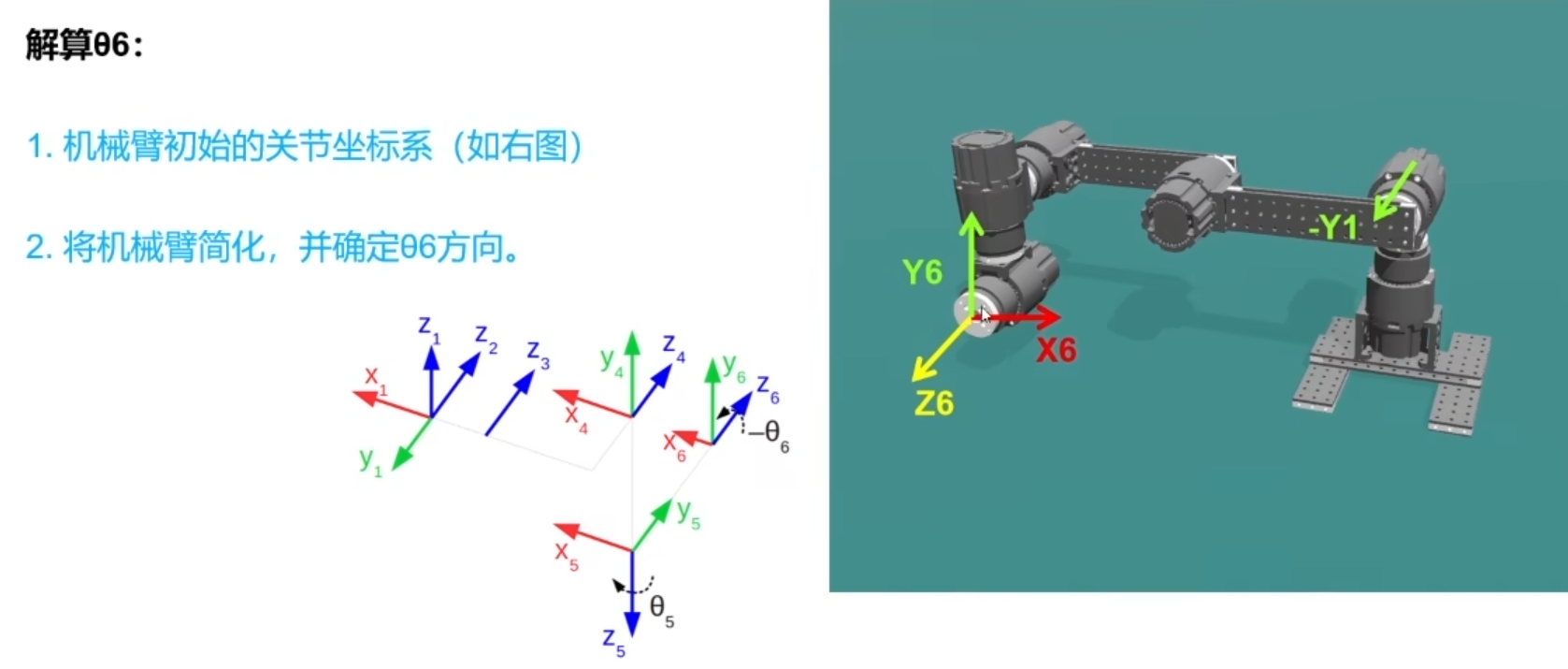
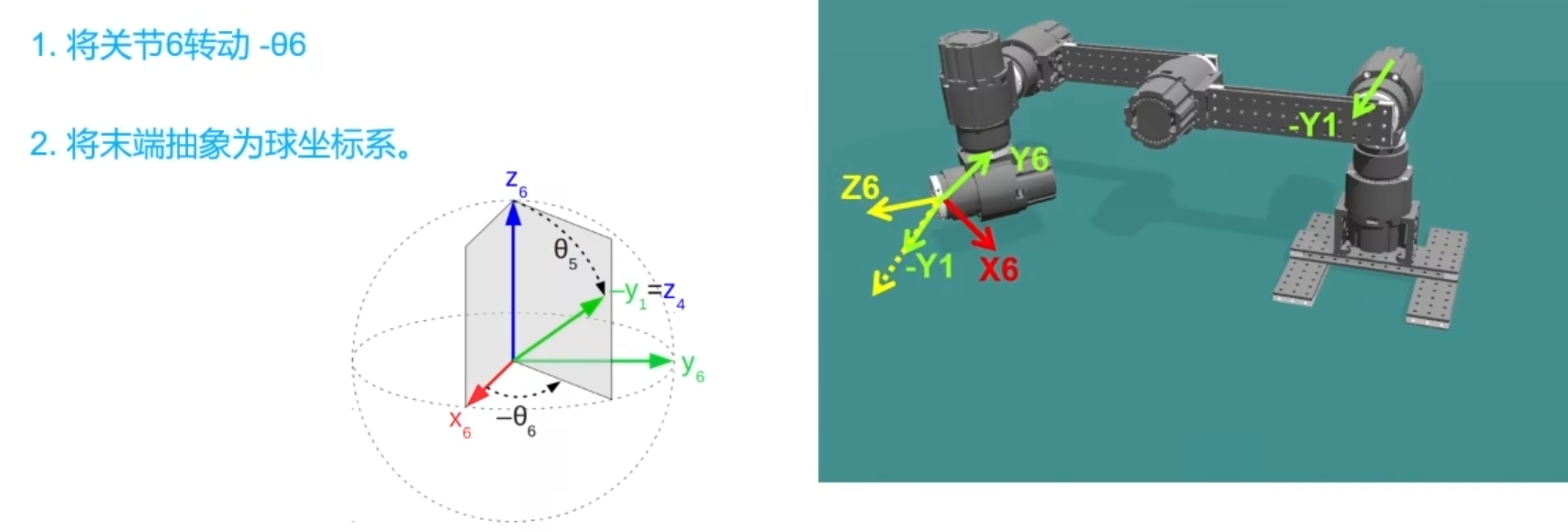
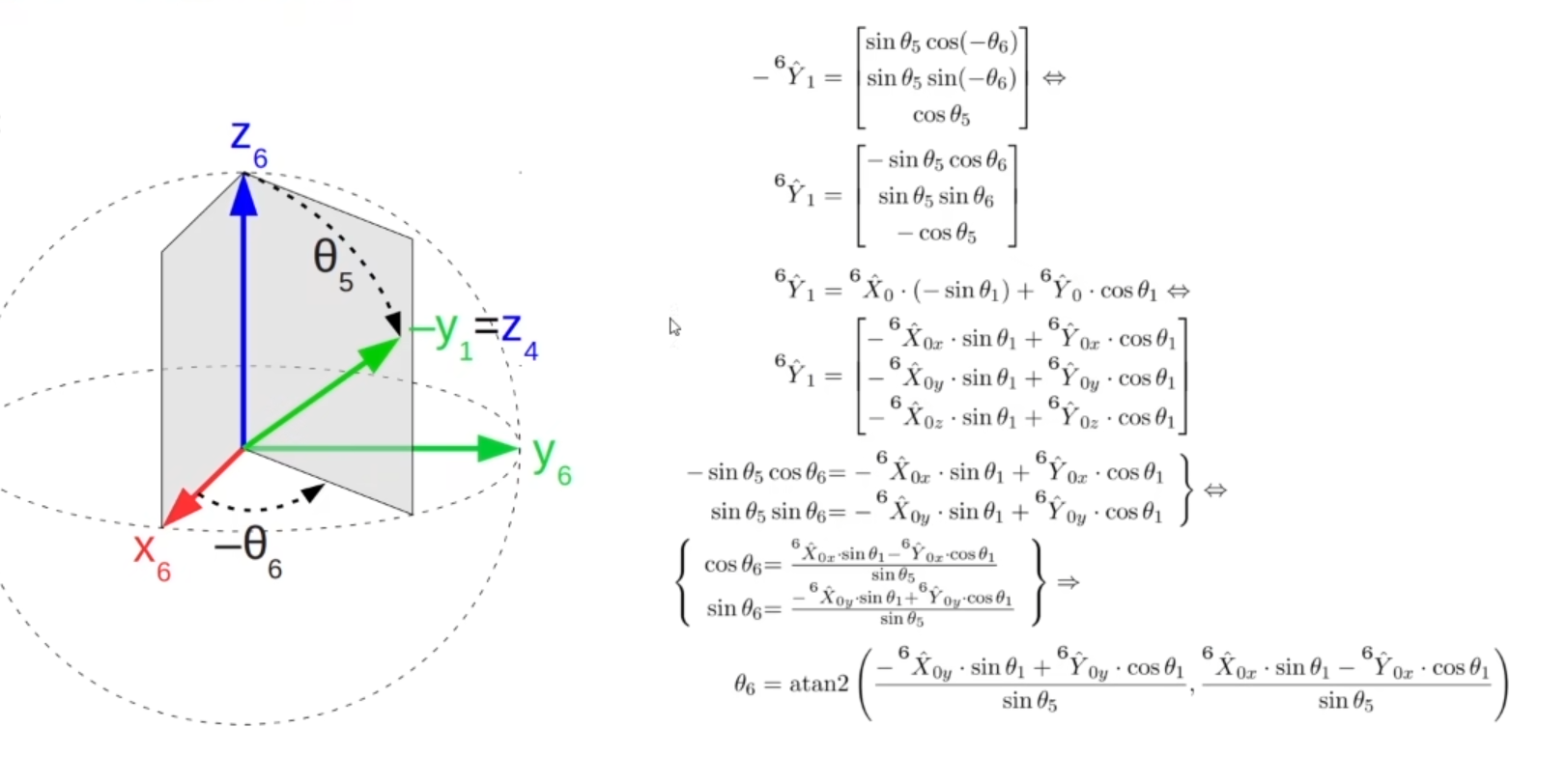
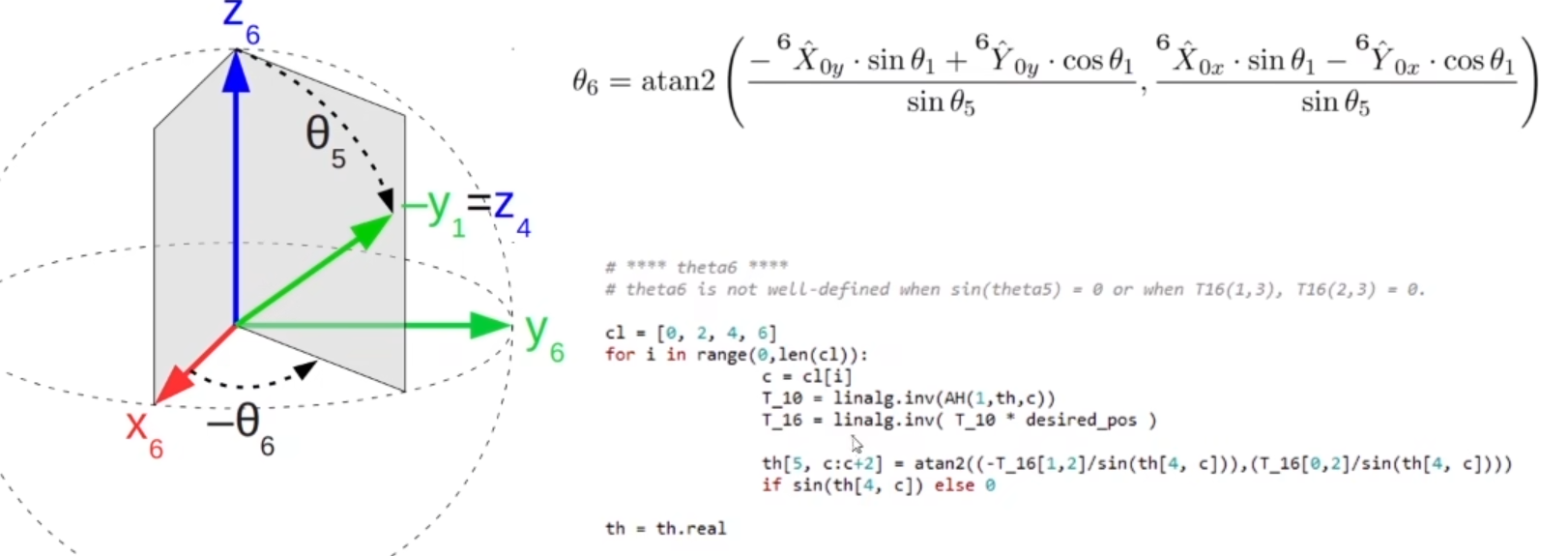
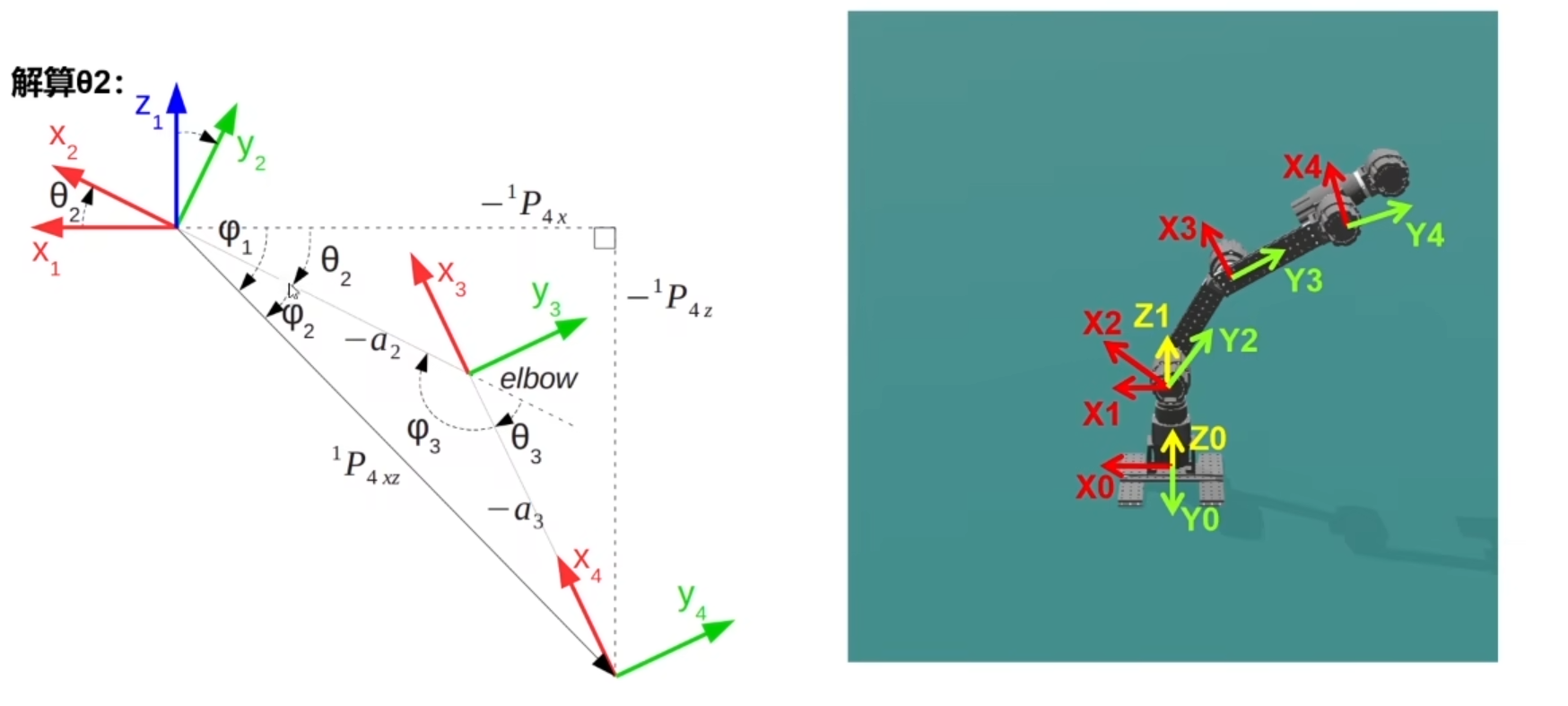
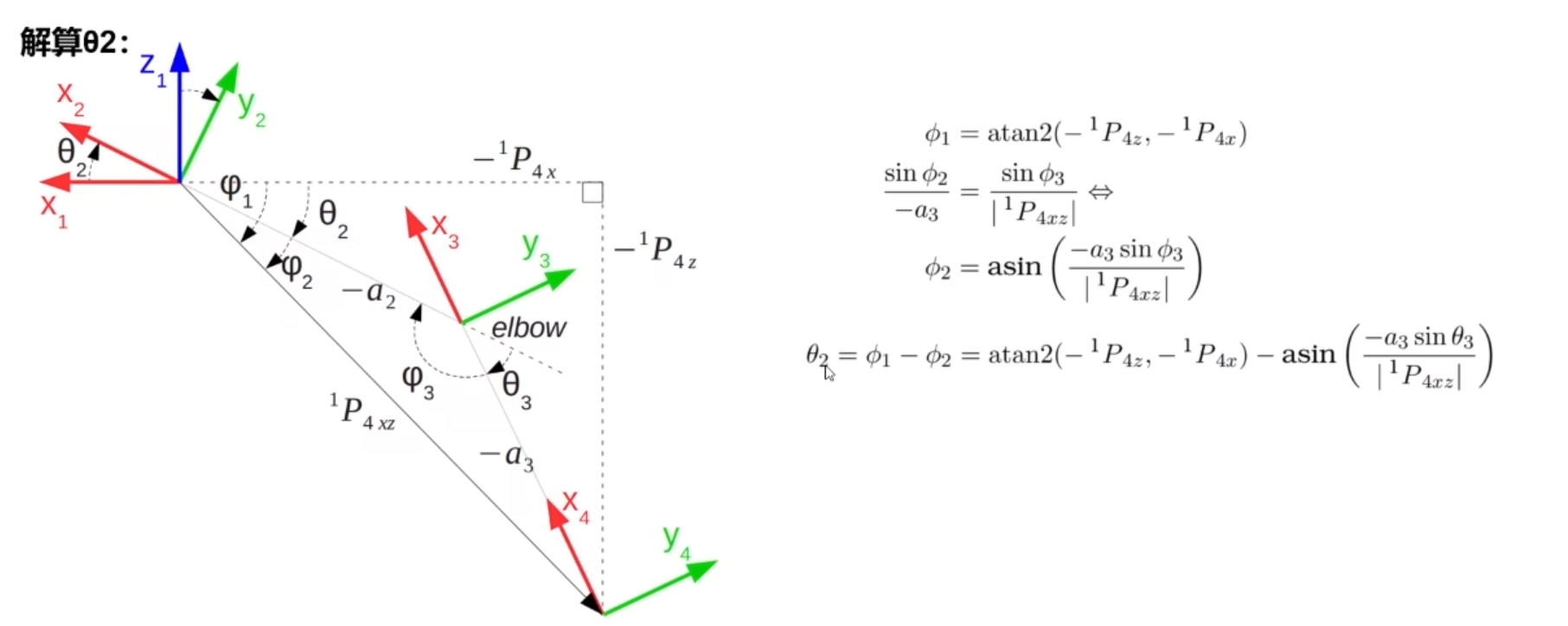
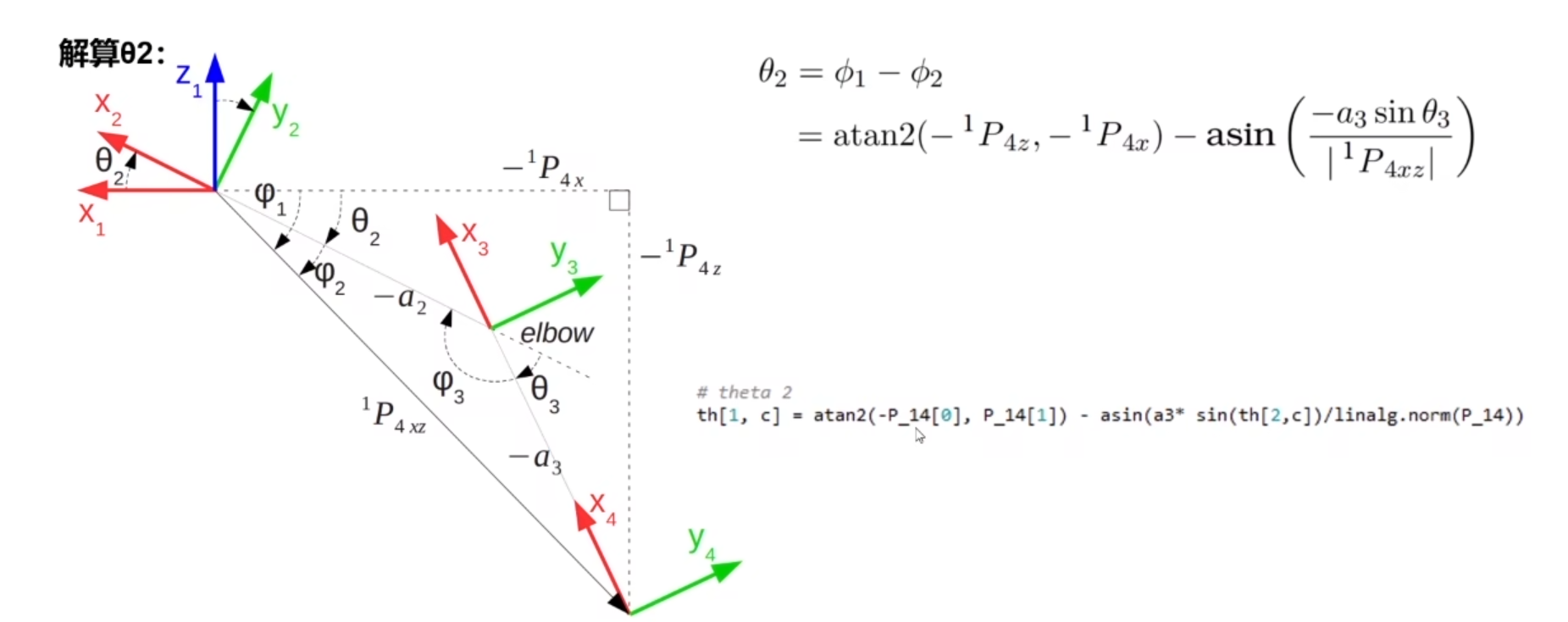
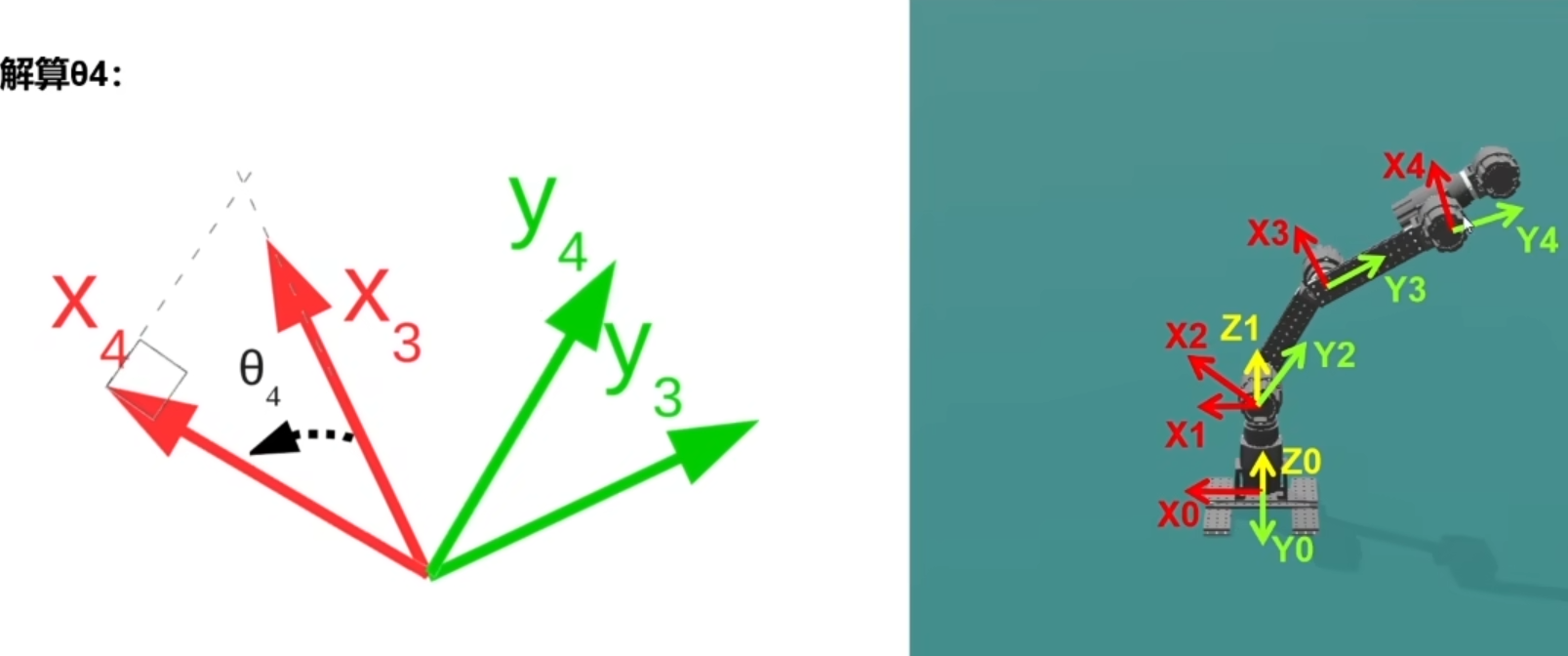
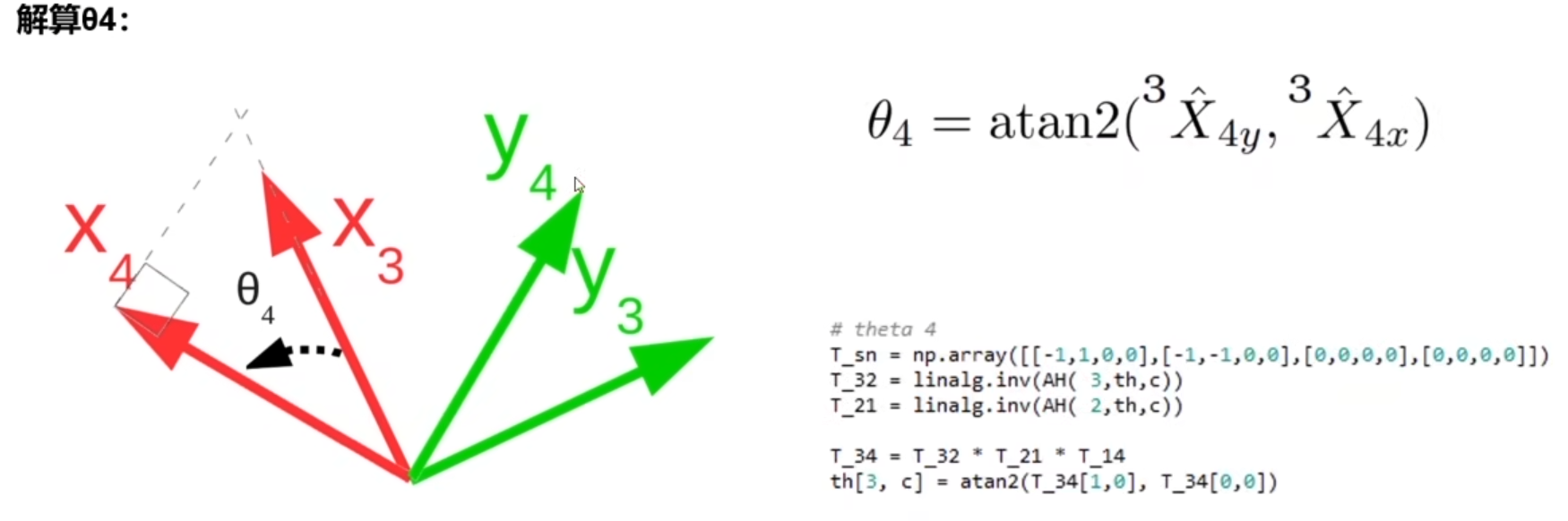
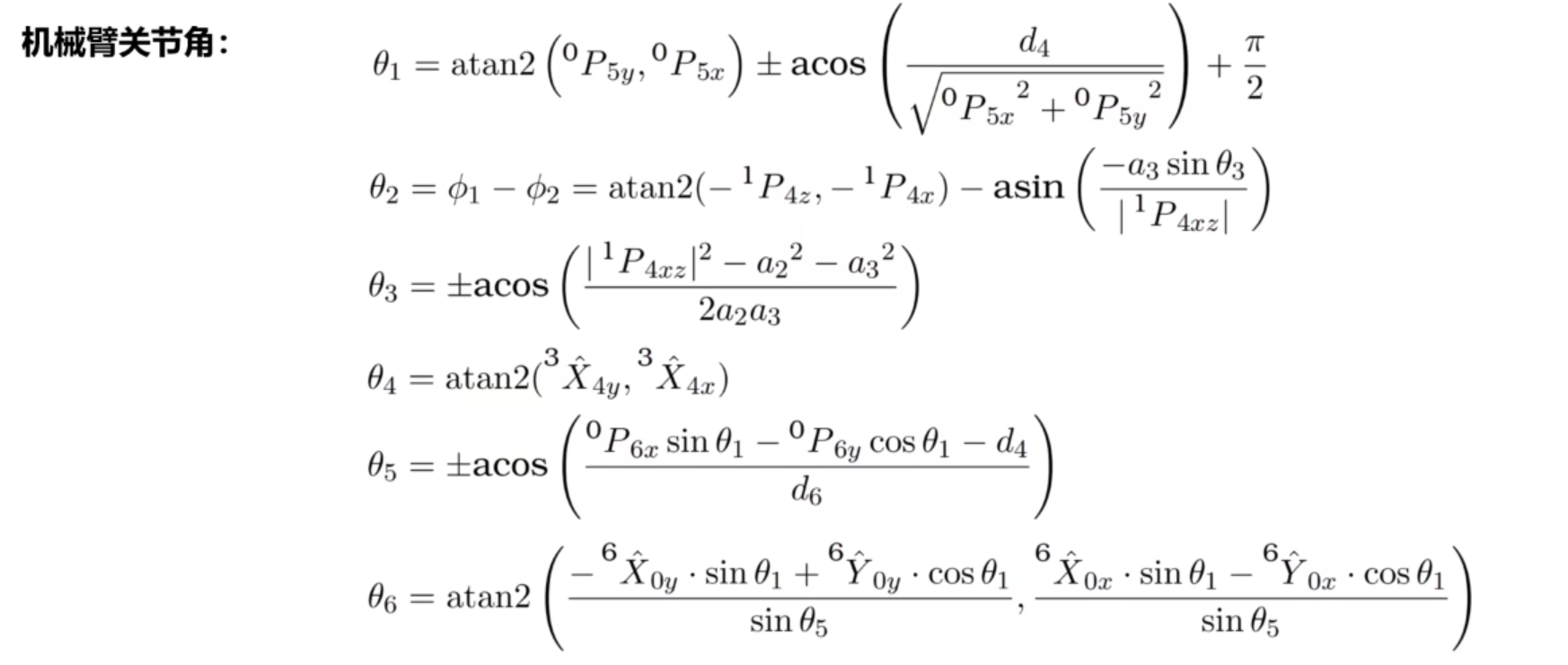
解算顺序为:θ1、θ5、θ6、θ3、计算θ2、计算θ4。

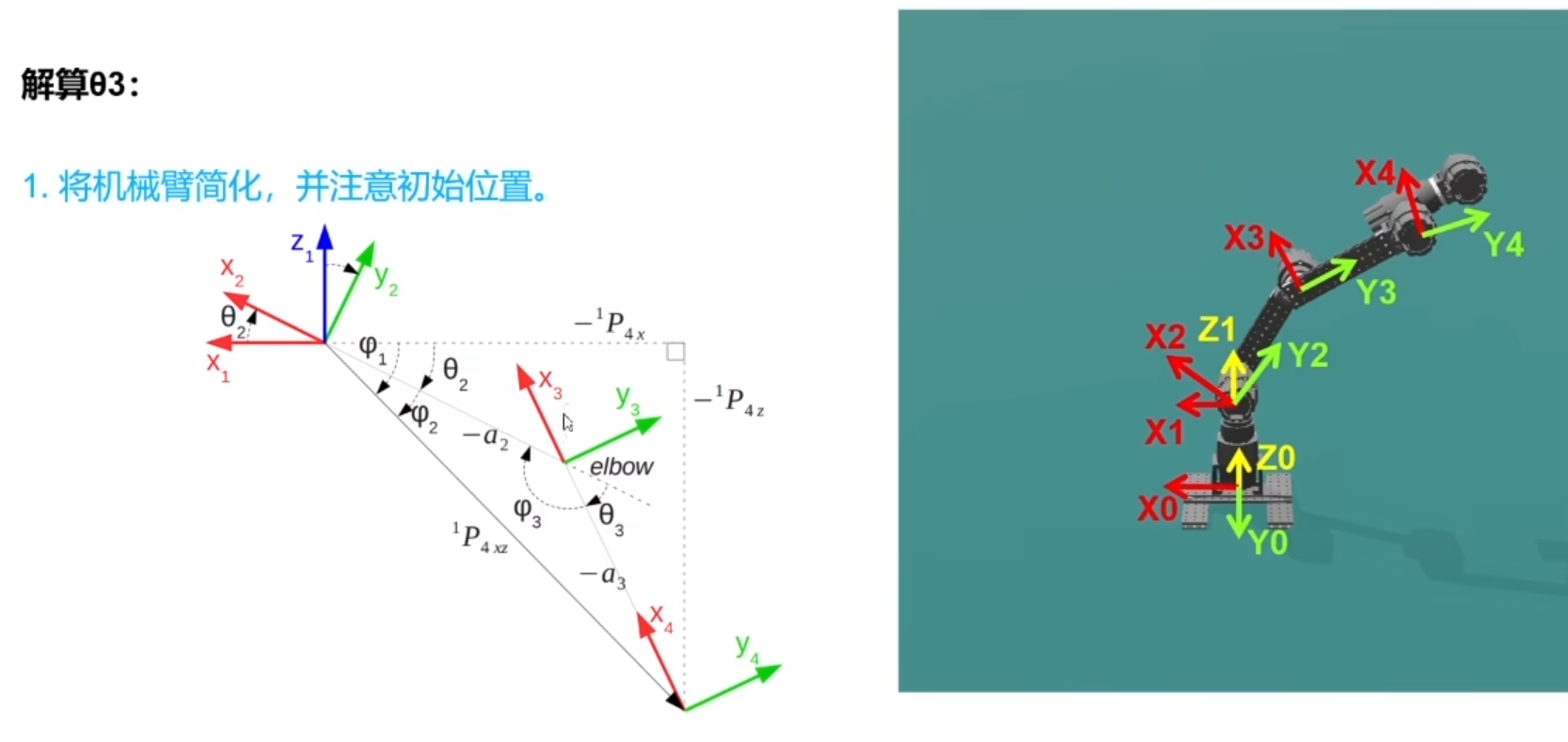
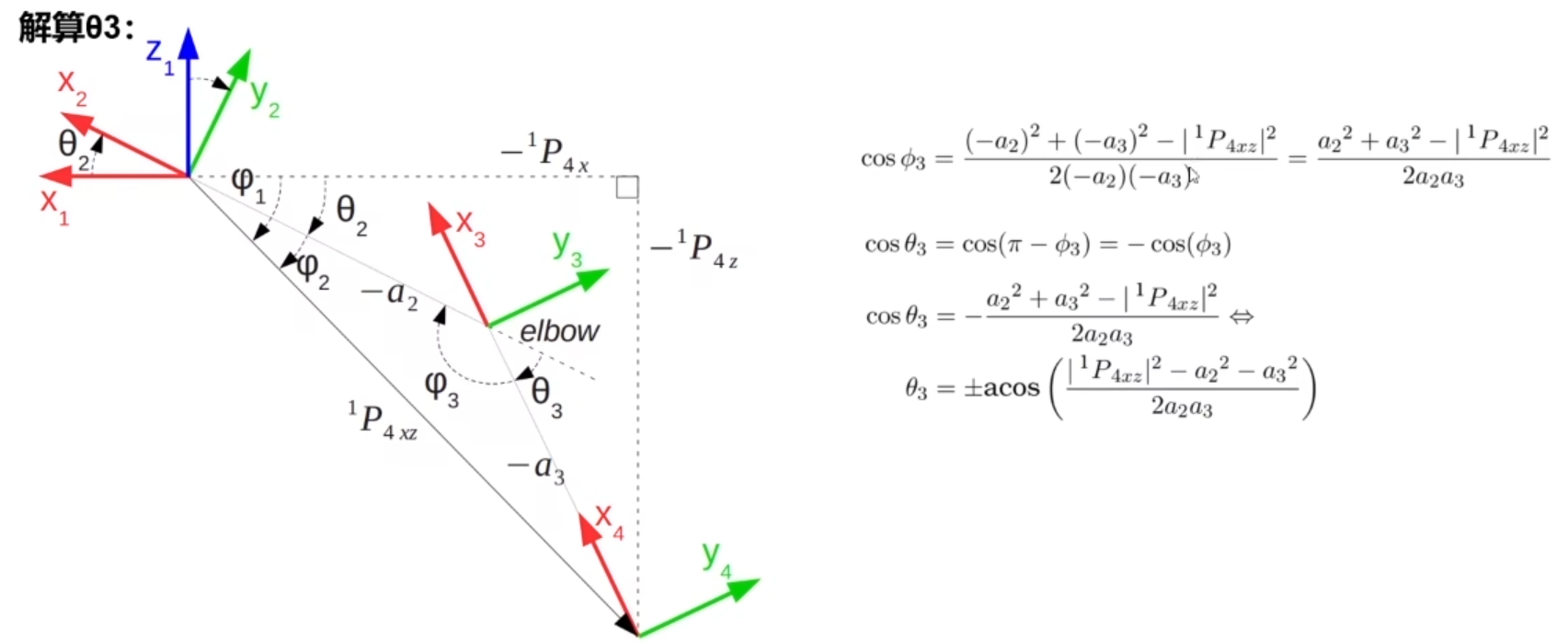
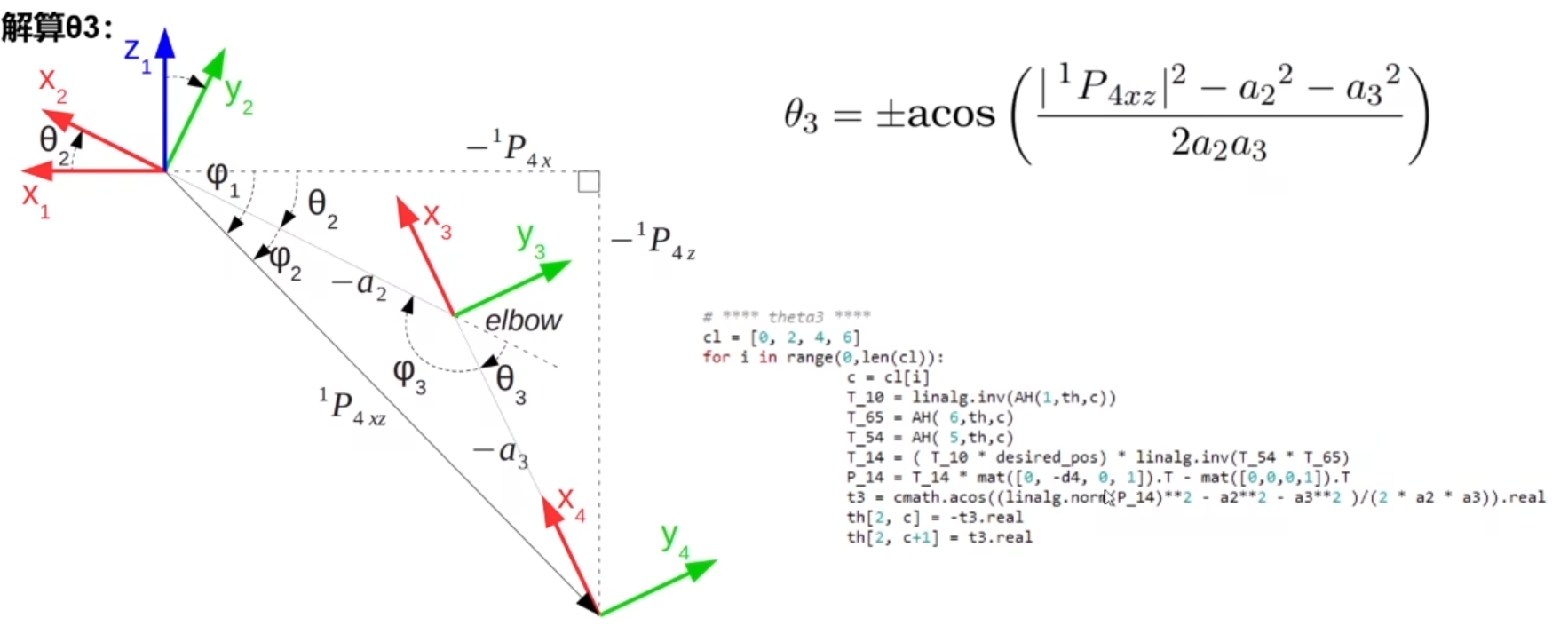
03 实际分析
【【开源项目】【深度教学】手把手带你实现视觉引导机械臂抓取(STM32+OPENMV方案)】
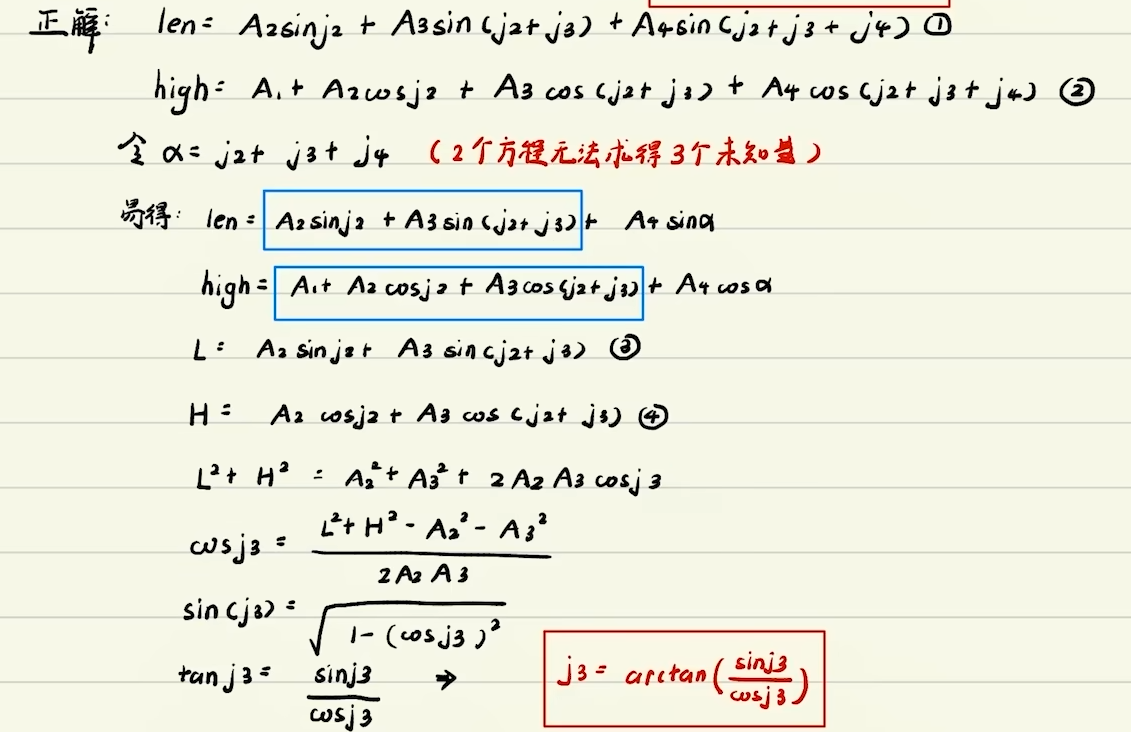
只需分析前四个对末端有影响的舵机
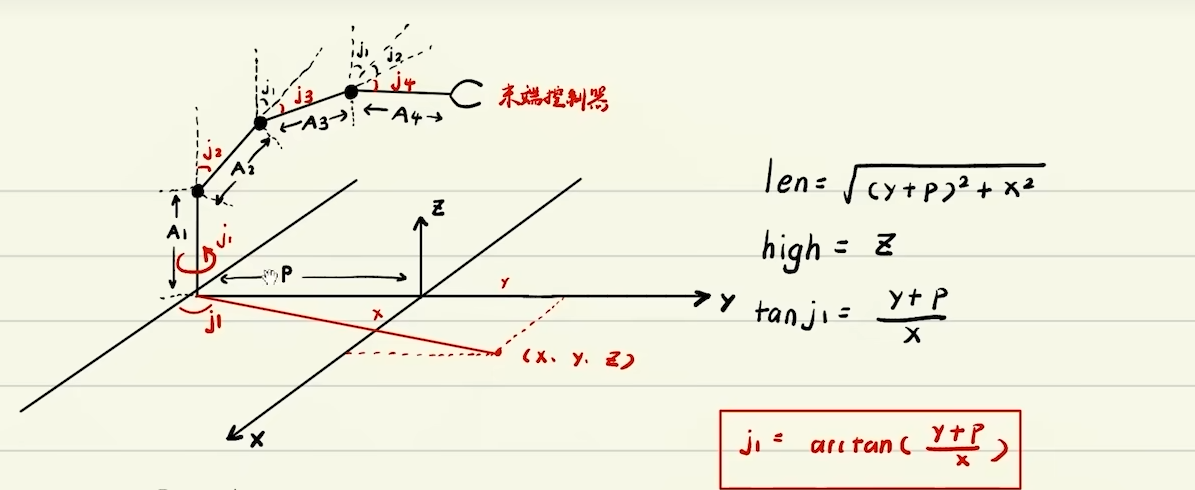

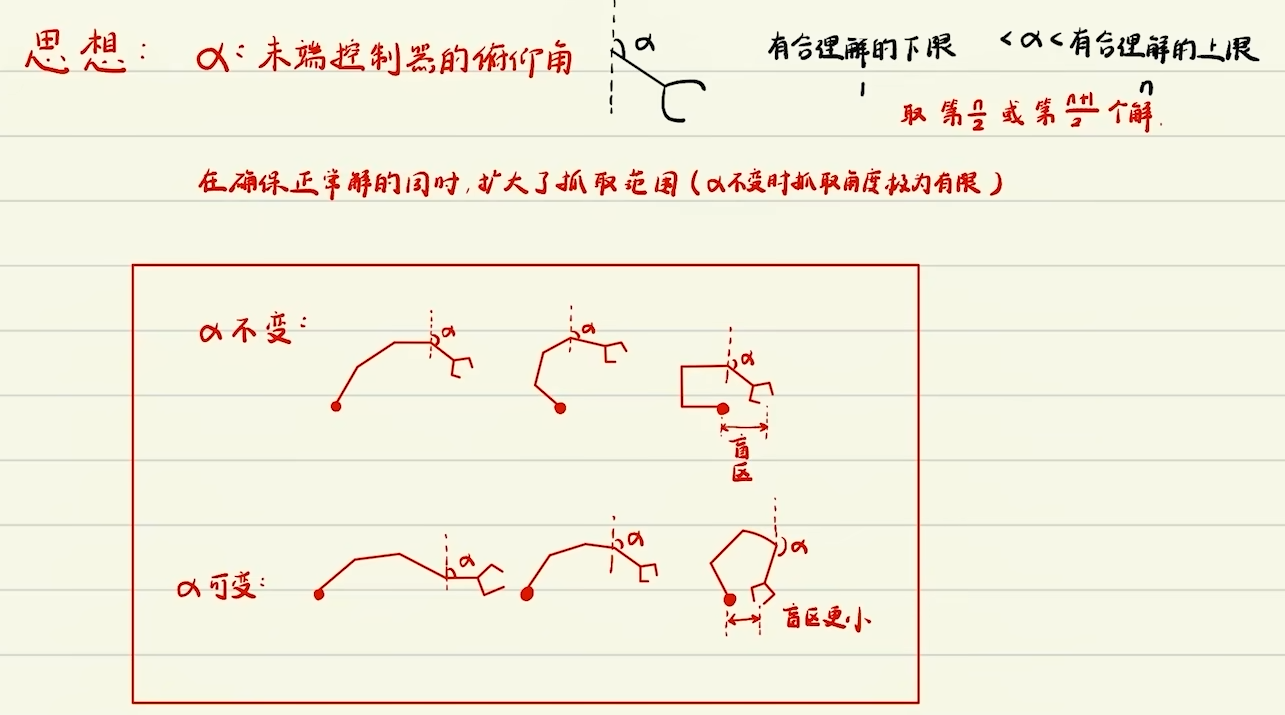
P_max = A2+A3+A4
04 开源资料

【[开源]人人都能复刻的下棋&分拣机器人】 https://www.bilibili.com/video/BV1dg4y1T7BX/?share_source=copy_web&vd_source=6169cf50b220a7982d3769ff4691feb6
铁憨憨(code): 铁憨憨的源码