深入理解8086指令集与反汇编技术
前言
在计算机科学的学习中,理解底层硬件和指令集是掌握计算机工作原理的关键。本文将围绕8086指令集及其反汇编技术展开,帮助读者深入理解8086汇编语言和机器码之间的关系,以及如何通过反汇编技术将机器码还原为可读的汇编指令。
1. 8086指令集概述
8086是Intel公司推出的一款16位微处理器,其指令集是x86架构的基础。8086指令集包含了多种类型的指令,如数据传输、算术运算、逻辑运算、控制转移等。以下是一些常见的指令类型:
- 数据传输指令:如MOV,用于在寄存器、内存和立即数之间传输数据。
- 算术运算指令:如ADD、SUB、MUL、DIV,用于执行基本的算术运算。
- 逻辑运算指令:如AND、OR、XOR、NOT,用于执行逻辑运算。
- 控制转移指令:如JMP、CALL、RET,用于控制程序的执行流程。
- 字符串操作指令:如MOVSB、CMPSB,用于处理字符串数据。
这些指令通过操作码(Opcode)和操作数(Operand)来定义,操作码指示指令的类型,而操作数则指定指令操作的数据来源和目的地。
2. 8086寄存器详解
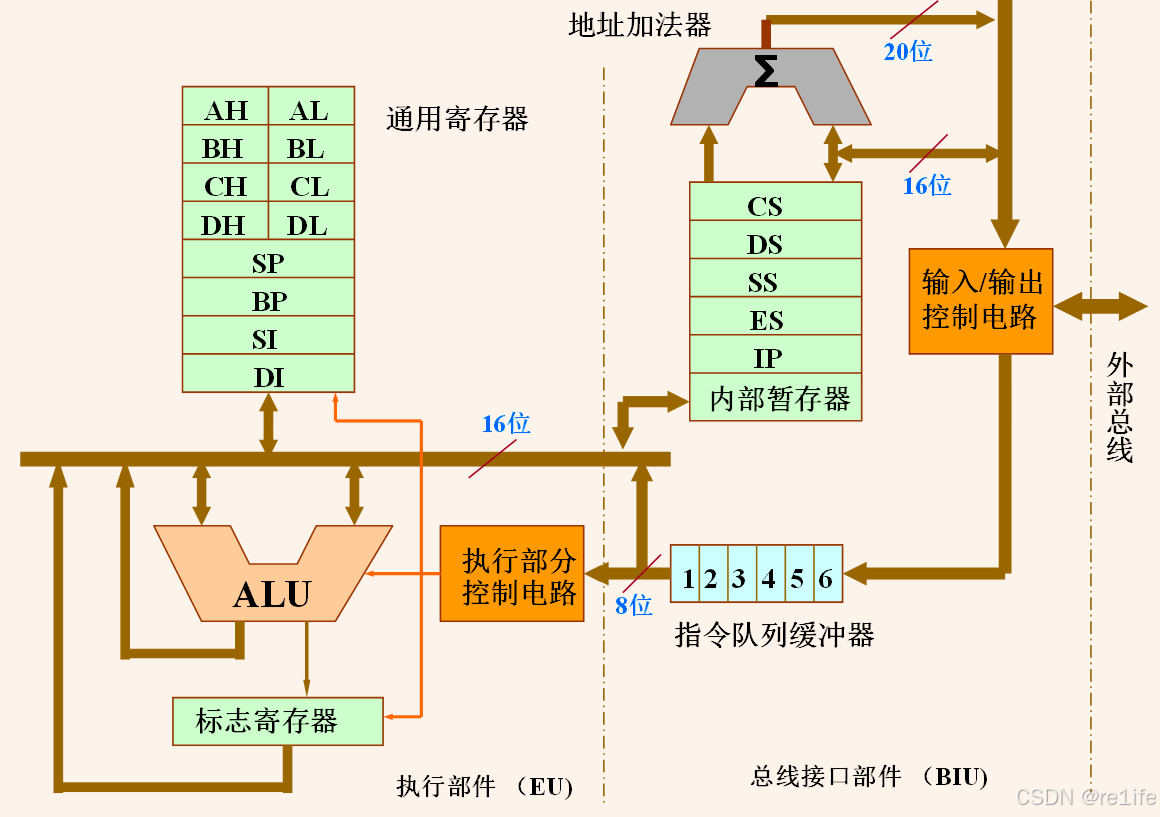
在8086架构中,寄存器是CPU内部的高速存储单元,用于临时存放数据和地址。8086的寄存器分为以下几类:
2.1 通用寄存器
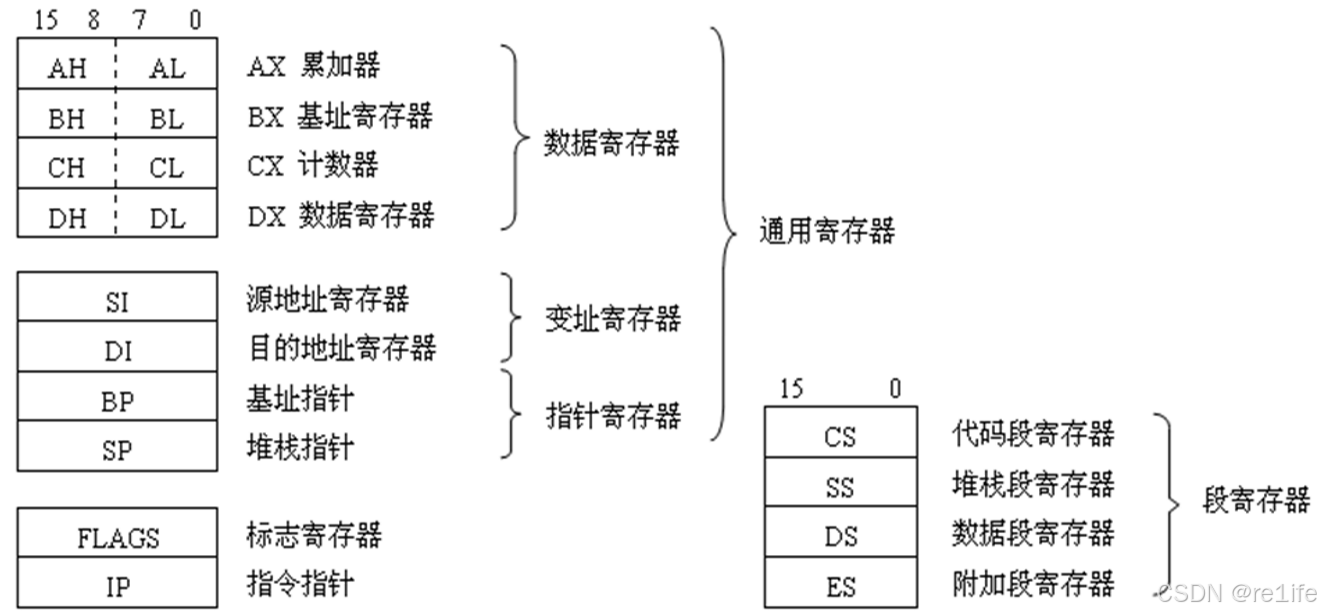
通用寄存器是8086中最常用的寄存器,主要用于存放数据和地址。8086有8个16位通用寄存器,分为两组:
- 数据寄存器:
AX(累加器):用于算术运算和I/O操作。
BX(基址寄存器):用于存放内存地址的基址。
CX(计数寄存器):用于循环和字符串操作中的计数。
DX(数据寄存器):用于I/O操作和存放数据。 - 指针和变址寄存器:
SP(堆栈指针):指向堆栈的顶部。
BP(基址指针):用于访问堆栈中的数据。
SI(源变址寄存器):用于字符串操作中的源地址。
DI(目的变址寄存器):用于字符串操作中的目的地址。
2.2 段寄存器
段寄存器用于存放内存段的起始地址。8086有4个16位段寄存器:
- CS(代码段):存放当前执行的代码段的起始地址。
- DS(数据段):存放当前数据段的起始地址。
- ES(附加段):用于额外的数据段。
- SS(堆栈段):存放当前堆栈段的起始地址。
2.3 控制寄存器
控制寄存器用于控制CPU的运行状态。8086有两个16位控制寄存器:
- IP(指令指针):存放下一条要执行的指令的偏移地址。
- FLAGS(标志寄存器):存放CPU的状态标志,如进位标志(CF)、零标志(ZF)等。
2.4 标志寄存器(FLAGS)

标志寄存器用于反映CPU的运行状态。常见的标志位包括:
- CF(进位标志):表示算术运算是否产生进位或借位。
- ZF(零标志):表示运算结果是否为零。
- SF(符号标志):表示运算结果的符号(正或负)。
- OF(溢出标志):表示运算结果是否溢出。
- PF(奇偶标志):表示运算结果中1的个数是否为偶数。
- AF(辅助进位标志):表示低4位是否产生进位或借位。
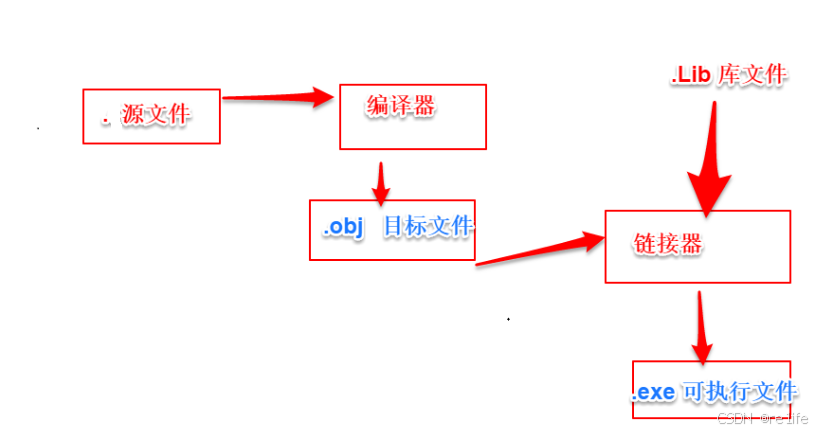
3. 机器码与汇编指令的关系

机器码是计算机可以直接执行的二进制代码,而汇编指令是机器码的可读形式。每条汇编指令对应一段机器码,反汇编的过程就是将机器码还原为汇编指令。
3.1 操作码与操作数
- 操作码:操作码是指令的核心部分,指示CPU执行什么操作。例如,MOV指令的操作码是0x89或0x8B。
- 操作数:操作数指定指令操作的数据来源和目的地。操作数可以是寄存器、内存地址或立即数。
3.2 ModR/M字节
在8086指令集中,许多指令使用ModR/M字节来编码操作数的来源和目的地。ModR/M字节分为三个部分:
- Mod字段:指定操作数的寻址模式(寄存器、内存、直接地址等)。
- Reg字段:指定寄存器操作数。
- R/M字段:指定寄存器或内存操作数。
通过解析ModR/M字节,可以确定指令的操作数类型和寻址方式。
4. 反汇编技术

反汇编是将机器码还原为汇编指令的过程。反汇编器的核心任务是解析机器码中的操作码和操作数,并生成对应的汇编指令。
4.1 反汇编的基本步骤
- 读取机器码:从二进制文件中读取机器码。
- 解析操作码:根据操作码确定指令的类型。
- 解析操作数:根据ModR/M字节和指令类型解析操作数。
- 生成汇编指令:将解析出的操作码和操作数转换为可读的汇编指令。
4.2 反汇编的挑战
- 指令长度可变:8086指令的长度不固定,需要根据操作码和ModR/M字节动态计算指令长度。
- 寻址模式复杂:8086支持多种寻址模式,如直接寻址、寄存器间接寻址、基址加变址寻址等。
- 指令前缀:如重复前缀REP、段前缀等,会影响指令的执行方式。
5. 8086指令集详解
8086指令集是x86架构的基础,包含了多种类型的指令,用于实现数据传输、算术运算、逻辑运算、控制转移等功能。以下是对各类指令的详细说明和示例。
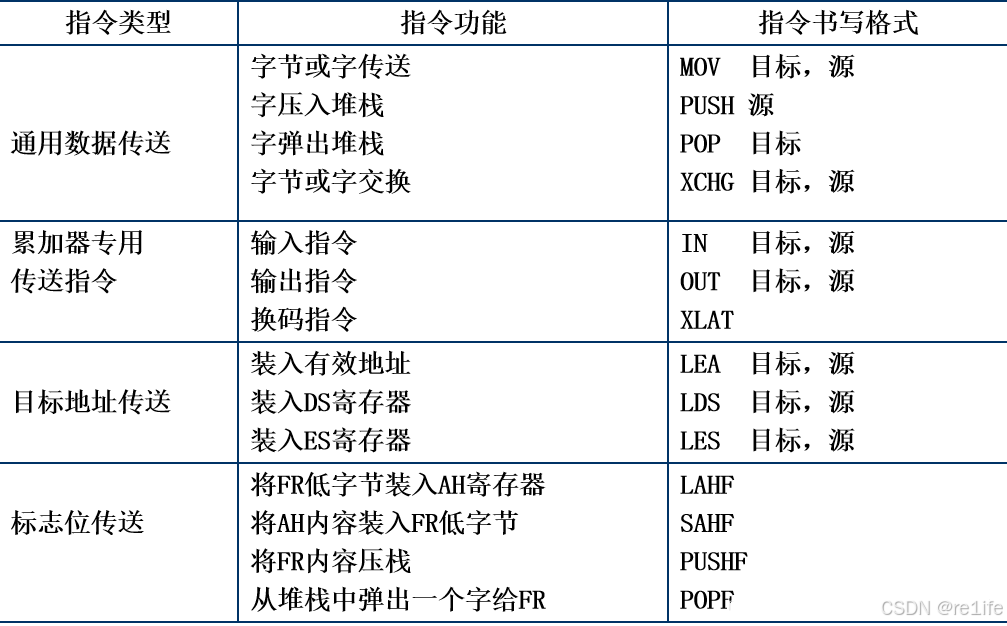
5.1 数据传输指令
数据传输指令用于在寄存器、内存和立即数之间传输数据。常见的指令包括:
- MOV:数据传送指令
功能:将源操作数的值传送到目标操作数。
示例:
MOV AX, BX ; 将寄存器BX的值传送到AX
MOV [BX], AX ; 将寄存器AX的值传送到内存地址[BX]
MOV AX, 1234h ; 将立即数1234h传送到AX
- XCHG:数据交换指令
功能:交换两个操作数的值。
示例:
XCHG AX, BX ; 交换AX和BX的值
- LEA:加载有效地址指令
功能:将内存地址加载到寄存器。
示例:
LEA BX, [SI+10] ; 将SI+10的地址加载到BX
5.2 算术运算指令
算术运算指令用于执行基本的算术运算,如加、减、乘、除等。
- ADD:加法指令
功能:将两个操作数相加,结果存储在目标操作数中。
示例:
ADD AX, BX ; AX = AX + BX
ADD AX, 10 ; AX = AX + 10
- SUB:减法指令
功能:将目标操作数减去源操作数,结果存储在目标操作数中。
示例:
SUB AX, BX ; AX = AX - BX
SUB AX, 10 ; AX = AX - 10
- MUL:无符号乘法指令
功能:将AX与源操作数相乘,结果存储在DX:AX中。
示例:
MUL BX ; DX:AX = AX * BX
- DIV:无符号除法指令
功能:将DX:AX除以源操作数,商存储在AX中,余数存储在DX中。
示例:
DIV BX ; AX = (DX:AX) / BX, DX = (DX:AX) % BX
5.3 逻辑运算指令
逻辑运算指令用于执行逻辑运算,如与、或、异或、非等。
- AND:逻辑与指令
功能:对两个操作数进行按位与运算,结果存储在目标操作数中。
示例:
AND AX, BX ; AX = AX & BX
- OR:逻辑或指令
功能:对两个操作数进行按位或运算,结果存储在目标操作数中。
示例:
OR AX, BX ; AX = AX | BX
- XOR:逻辑异或指令
功能:对两个操作数进行按位异或运算,结果存储在目标操作数中。
示例:
XOR AX, BX ; AX = AX ^ BX
- NOT:逻辑非指令
功能:对操作数进行按位取反运算。
示例:
NOT AX ; AX = ~AX
5.4 控制转移指令
控制转移指令用于改变程序的执行流程,如跳转、调用、返回等。
- JMP:无条件跳转指令
功能:无条件跳转到指定地址。
示例:
JMP 0x1000 ; 跳转到地址0x1000
- CALL:调用子程序指令
功能:调用指定地址的子程序。
示例:
CALL 0x2000 ; 调用位于地址0x2000的子程序
- RET:返回指令
功能:从子程序返回到调用点。
示例:
RET ; 返回
- 条件跳转指令
功能:根据标志寄存器的状态决定是否跳转。
示例:
JZ Label ; 如果ZF=1(结果为0),跳转到Label
JNZ Label ; 如果ZF=0(结果不为0),跳转到Label
5.5 字符串操作指令
字符串操作指令用于处理字符串数据,如复制、比较、扫描等。
- MOVSB:字符串传送指令
功能:将DS:SI指向的字节传送到ES:DI,并自动递增SI和DI。
示例:
MOVSB ; 复制一个字节
- CMPSB:字符串比较指令
功能:比较DS:SI和ES:DI指向的字节,并自动递增SI和DI。
示例:
CMPSB ; 比较一个字节
- SCASB:字符串扫描指令
功能:比较AL与ES:DI指向的字节,并自动递增DI。
示例:
SCASB ; 扫描一个字节
- REP:重复前缀指令
功能:重复执行后续的字符串操作指令,直到CX=0。
示例:
REP MOVSB ; 重复复制CX个字节
5.6 标志操作指令
标志操作指令用于操作标志寄存器。
- CLC:清除进位标志
功能:将CF(进位标志)置为0。
示例:
CLC ; CF = 0
- STC:设置进位标志
功能:将CF(进位标志)置为1。
示例:
STC ; CF = 1
- CLI:清除中断标志
功能:将IF(中断标志)置为0,禁止中断。
示例:
CLI ; IF = 0
- STI:设置中断标志
功能:将IF(中断标志)置为1,允许中断。
示例:
STI ; IF = 1
5.7 堆栈操作指令
堆栈操作指令用于操作堆栈。
- PUSH:压栈指令
功能:将操作数压入堆栈。
示例:
PUSH AX ; 将AX压入堆栈
- POP:出栈指令
功能:将栈顶数据弹出到操作数。
示例:
POP AX ; 将栈顶数据弹出到AX
- PUSHF:压入标志寄存器
功能:将标志寄存器压入堆栈。
示例:
PUSHF ; 将FLAGS压入堆栈
- POPF:弹出标志寄存器
功能:将栈顶数据弹出到标志寄存器。
示例:
POPF ; 将栈顶数据弹出到FLAGS
5.8 其他指令
- NOP:空操作指令
功能:不执行任何操作,用于延时或占位。
示例:
NOP ; 空操作
- HLT:停机指令
功能:停止CPU的执行,等待中断。
示例:
HLT ; 停机
6. 反汇编器的实现
反汇编器的实现需要深入理解8086指令集和机器码的编码规则。以下是一个简单的反汇编流程:
- 读取机器码:从二进制文件中读取机器码。
- 解析操作码:根据操作码确定指令的类型。
- 解析操作数:根据ModR/M字节和指令类型解析操作数。
- 生成汇编指令:将解析出的操作码和操作数转换为可读的汇编指令。
例如,对于机器码0x89 0xC3,反汇编器会解析出操作码0x89(MOV指令)和ModR/M字节0xC3,最终生成汇编指令MOV BX, AX。
7. 总结
8086指令集是x86架构的基础,理解其指令集和机器码的编码规则对于学习汇编语言和反汇编技术至关重要。通过反汇编技术,我们可以将机器码还原为可读的汇编指令,从而更好地理解程序的执行逻辑。
希望本文能帮助读者深入理解8086指令集和反汇编技术,为后续的学习和实践打下坚实的基础。