2025年SP SCI2区:自适应灰狼算法IGWO,深度解析+性能实测
目录
- 1.摘要
- 2.灰狼算法GWO原理
- 3.无源雷达网络干扰源跟踪的IGWO-MCCKF方法
- 4.结果展示
- 5.参考文献
- 6.代码获取
1.摘要
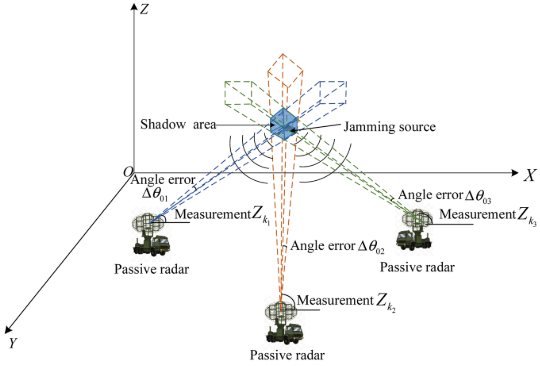
在复杂的电磁环境中,利用被动雷达网络跟踪干扰源对于增强抗干扰能力、军事作战安全和战略决策具有重要意义。然而,传统的干扰源跟踪算法由于被动雷达系统的高度非线性和未知噪声特性,常常存在跟踪精度低和收敛速度慢的问题。为了提高被动雷达网络的干扰源跟踪能力,本文提出了一种基于改进灰狼算法的最大相关熵立方卡尔曼滤波器。IGWO提出了一种通过高斯随机游走和高斯变异策略改进的灰狼优化机制,用于准确估计未知过程和测量噪声的特性,为立方卡尔曼滤波算法提供更准确的模型参数。
2.灰狼算法GWO原理
【智能算法】灰狼算法(GWO)原理及实现
3.无源雷达网络干扰源跟踪的IGWO-MCCKF方法
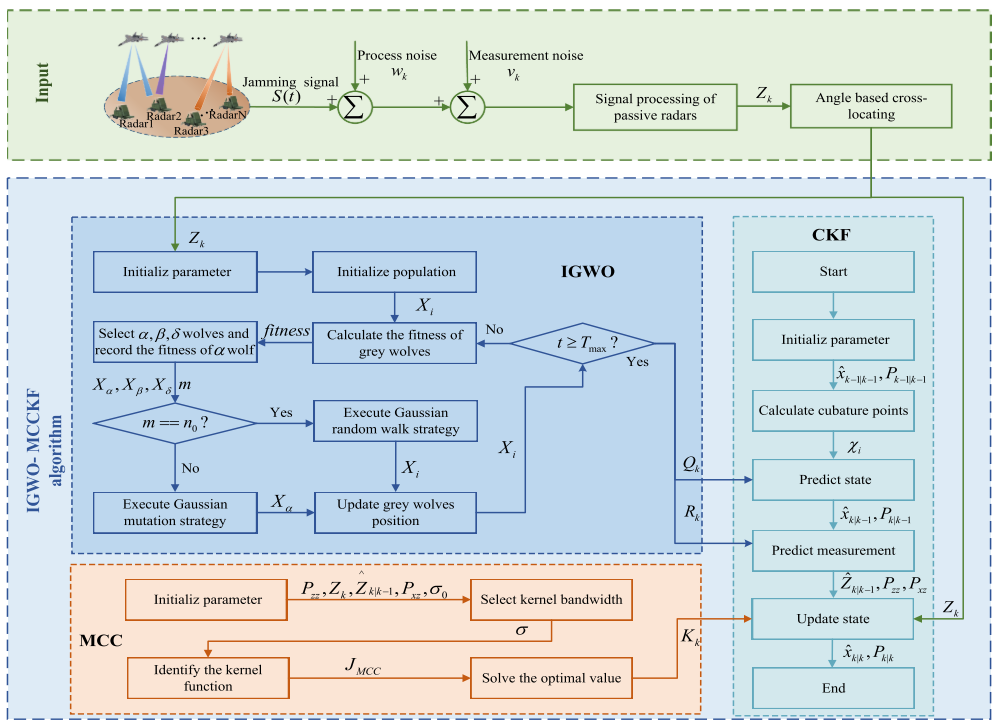
IGWO-MCCKF算法用于被动雷达网络中的干扰源跟踪。采用三阶球面径向立方体准则对非线性积分进行数值近似,获取干扰源状态、测量值和误差协方差矩阵的先验信息。IGWO通过高斯随机游走和高斯突变策略实时估计MNCM和PECM,从而为算法提供精确的模型参数。同时,设计了自适应最大相关熵准则(MCC),以优化滤波增益,抑制离群值对滤波估计的影响。结合优化结果和干扰源的先验信息,更新干扰源的后验状态。
基于IGWO算法的噪声协方差估计
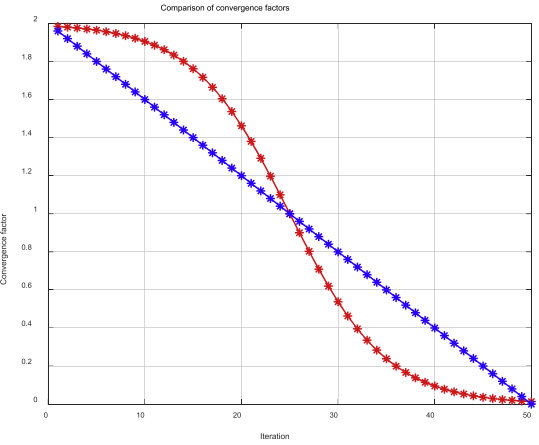
改进非线性因子
a
a
a:
a
=
1
+
tanh
(
2.5
∗
(
1
−
2
t
T
m
a
x
)
)
a=1+\tanh\left(2.5*\left(1-\frac{2t}{T_{max}}\right)\right)
a=1+tanh(2.5∗(1−Tmax2t))
在GWO算法中,领导狼群的重要性没有显著差异。为了突出
α
\alpha
α的优越性,狼的位置可以更新为:
X
(
t
+
1
)
=
ω
1
X
1
(
t
+
1
)
+
ω
2
X
2
(
t
+
1
)
+
ω
3
X
3
(
t
+
1
)
X(t+1)=\omega_1X_1(t+1)+\omega_2X_2(t+1)+\omega_3X_3(t+1)
X(t+1)=ω1X1(t+1)+ω2X2(t+1)+ω3X3(t+1)
其中参数为:
{
ω
1
=
J
1
J
1
+
J
2
+
J
3
ω
2
=
J
2
J
1
+
J
2
+
J
3
ω
3
=
J
3
J
1
+
J
2
+
J
3
\begin{cases} \omega_{1}=\frac{J_{1}}{J_{1}+J_{2}+J_{3}} \\ \omega_{2}=\frac{J_{2}}{J_{1}+J_{2}+J_{3}} \\ \omega_{3}=\frac{J_{3}}{J_{1}+J_{2}+J_{3}} & & & \end{cases}
⎩
⎨
⎧ω1=J1+J2+J3J1ω2=J1+J2+J3J2ω3=J1+J2+J3J3
高斯分布的概率密度函数为:
G
a
u
s
s
i
o
n
(
μ
,
σ
2
)
=
1
2
π
σ
2
e
−
(
x
−
μ
)
2
2
σ
2
Gaussion(\mu,\sigma^2)=\frac{1}{\sqrt{2\pi\sigma^2}}e^{-\frac{(x-\mu)^2}{2\sigma^2}}
Gaussion(μ,σ2)=2πσ21e−2σ2(x−μ)2
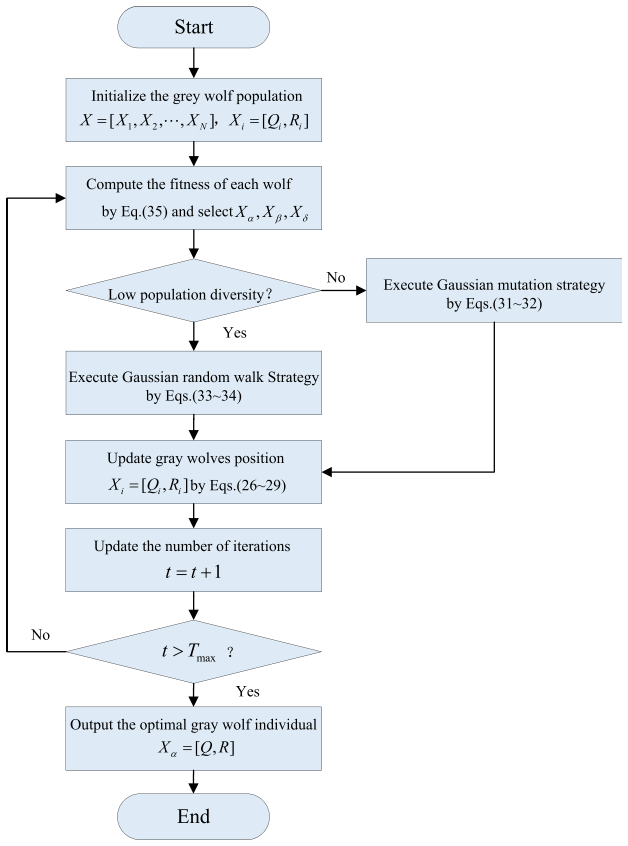
高斯随机漫步策略可以利用种群中适应度值最好的个体来调整个体的位置,从而对整个种群中的个体进行扰动,帮助内个体跳出局部最优,提高算法的收敛性。如果连续
n
0
n_0
n0次适应度值保持不变,则判定其陷入局部最优,则执行高斯随机漫步策略。
X
i
(
t
)
=
G
a
u
s
s
i
a
n
(
X
α
,
τ
)
+
(
r
1
X
α
−
r
2
X
i
)
X_i(t)=Gaussian(X_\alpha,\tau)+(r_1X_\alpha-r_2X_i)
Xi(t)=Gaussian(Xα,τ)+(r1Xα−r2Xi)
τ = log ( t ) t ( X i − X α ) \tau=\frac{\log(t)}{t}(X_i-X_\alpha) τ=tlog(t)(Xi−Xα)
流程图
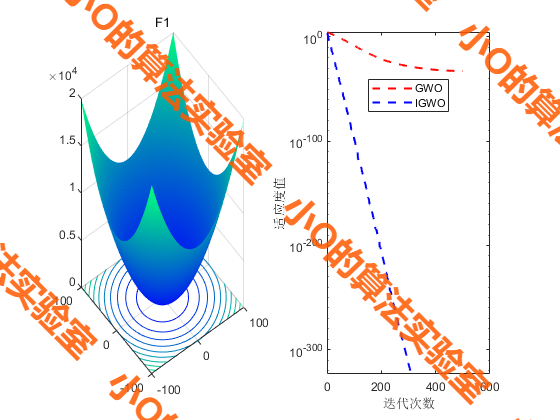
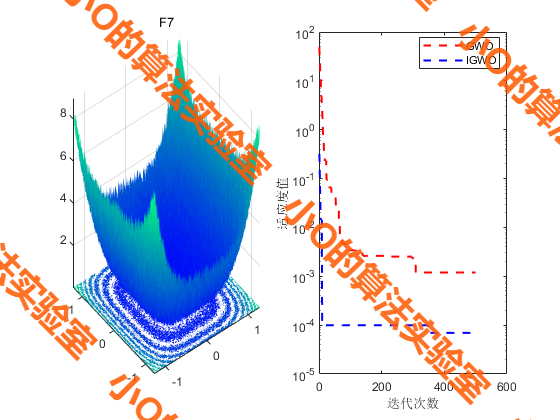
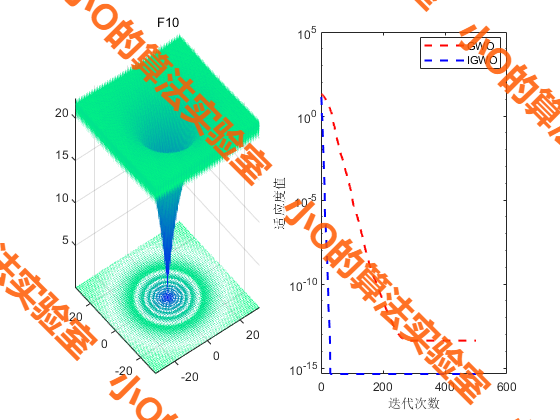
4.结果展示
5.参考文献
[1] Jiang W, Liu Z, Wang Y, et al. Enhancing jamming source tracking capability via adaptive grey wolf optimization mechanism for passive radar network[J]. Signal Processing, 2025, 235: 110026.