PCL八叉树聚类
PCL八叉树聚类
- 主要流程
- 完整代码
- 部分代码解析
- 关键元素解析
- `std::for_each`算法
- Lambda表达式
- 等价
- 效果
主要流程
- 读取点云数据:从PCD文件中加载原始点云
- 构建八叉树:对点云进行八叉树空间划分
- 获取体素中心:提取八叉树中所有被占据的体素中心点
- 欧式聚类:对体素中心点进行欧式聚类
- 扩展聚类结果:将聚类结果从体素中心扩展到原始点云
- 可视化与保存:对聚类结果着色并可视化/保存
完整代码
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/octree/octree_search.h>
#include <pcl/octree/octree_pointcloud.h>
#include <pcl/segmentation/extract_clusters.h> // 欧式聚类分割
#include <pcl/visualization/pcl_visualizer.h>// 聚类结果分类渲染
void clusterColor(pcl::PointCloud<pcl::PointXYZRGB>::Ptr& ccloud)
{double R = rand() % (256) + 0;double G = rand() % (256) + 0;double B = rand() % (256) + 0;for_each(ccloud->begin(), ccloud->end(),[R, G, B](pcl::PointXYZRGB& point){ point.r = R, point.g = G, point.b = B; });};int main(int argc, char* argv[])
{// --------------------------------读取点云------------------------------------pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>("../../../data/000000.pcd", *cloud) == -1){PCL_ERROR("Couldn't read file test_pcd.pcd \n");return -1;}// 参数设置float leaf = 0.3f; // 八叉树深度参数int minSize = 50;// --------------------------获取八叉树体素中心-------------------------------pcl::PointCloud<pcl::PointXYZ>::VectorType voxelCentroids;pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(leaf);octree.setInputCloud(cloud);octree.addPointsFromInputCloud();octree.getOccupiedVoxelCenters(voxelCentroids);// 保存八叉树体素中心为点云pcl::PointCloud<pcl::PointXYZ>::Ptr v_cloud(new pcl::PointCloud<pcl::PointXYZ>);v_cloud->resize(voxelCentroids.size());transform(voxelCentroids.begin(), voxelCentroids.end(), v_cloud->begin(), [&](const auto& p)->pcl::PointXYZ{pcl::PointXYZ point;point.x = p.x;point.y = p.y;point.z = p.z;return point;});float dis_th = std::sqrt(3.0f * leaf * leaf); // 计算聚类深度阈值// ------------------------------欧式聚类------------------------------------pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);tree->setInputCloud(v_cloud);std::vector<pcl::PointIndices> cluster_indices; // 聚类索引pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;// 欧式聚类对象ec.setClusterTolerance(dis_th); // 设置近邻搜索的搜索半径(也即两个不同聚类团点之间的最小欧氏距离)ec.setMinClusterSize(minSize); // 设置一个聚类需要的最少的点数ec.setMaxClusterSize(v_cloud->size()); // 设置一个聚类需要的最大点数ec.setSearchMethod(tree); // 设置点云的搜索机制ec.setInputCloud(v_cloud); // 设置输入点云ec.extract(cluster_indices); // 从点云中提取聚类,并将点云索引保存在cluster_indices中std::vector<pcl::PointCloud<pcl::PointXYZ>>label;// ---------------------------最终聚类结果----------------------------------for (int i = 0; i < cluster_indices.size(); i++){// 聚类完成后,重新找到八叉树内部所有点pcl::PointCloud<pcl::PointXYZ> voxel_cloud, cloud_copy;pcl::copyPointCloud(*v_cloud, cluster_indices[i].indices, cloud_copy); // 按照索引提取点云数据for (int j = 0; j < cloud_copy.points.size(); ++j){std::vector<int> pointIdxVec; // 保存体素近邻搜索的结果向量if (octree.voxelSearch(cloud_copy.points[j], pointIdxVec)){for (size_t k = 0; k < pointIdxVec.size(); ++k){voxel_cloud.push_back(cloud->points[pointIdxVec[k]]);}}}if (voxel_cloud.points.size() > minSize){label.push_back(voxel_cloud);}}// -----------------------聚类结果分类保存---------------------------pcl::PointCloud<pcl::PointXYZRGB>::Ptr clusterResult(new pcl::PointCloud<pcl::PointXYZRGB>);int begin = 1;std::vector<int> idx;for (int i = 0; i < label.size(); ++i){pcl::PointCloud<pcl::PointXYZRGB>::Ptr clusterTemp(new pcl::PointCloud<pcl::PointXYZRGB>);clusterTemp->resize(label[i].size());for (int j = 0; j < clusterTemp->size(); ++j){clusterTemp->points[j].x = label[i][j].x;clusterTemp->points[j].y = label[i][j].y;clusterTemp->points[j].z = label[i][j].z;}clusterColor(clusterTemp);*clusterResult += *clusterTemp;// 聚类结果分类保存//pcl::io::savePCDFileBinary("lc_cluster_" + std::to_string(begin) + ".pcd", *clusterTemp);begin++;}pcl::io::savePCDFileBinary("LCclusterResult.pcd", *clusterResult);pcl::visualization::PCLVisualizer viewer("cloud viewer");viewer.setBackgroundColor(0, 0, 0);viewer.addPointCloud(clusterResult, "viewer");while (!viewer.wasStopped())//要想让自己所创窗口一直显示{viewer.spinOnce();}return 0;
}部分代码解析
//聚类结果分类渲染
void clusterColor(pcl::PointCloud<pcl::PointXYZRGB>::Ptr& ccloud)
{double R = rand() % (256) + 0;double G = rand() % (256) + 0;double B = rand() % (256) + 0;for_each(ccloud->begin(), ccloud->end(),[R, G, B](pcl::PointXYZRGB& point){ point.r = R, point.g = G, point.b = B; });};
关键元素解析
std::for_each算法
- 功能:遍历从
ccloud->begin()到ccloud->end()的所有点 - 作用:对点云中的每个点执行指定的lambda函数
- 特点:
- 标准模板库(STL)提供的遍历算法
- 比传统for循环更简洁安全
- 自动处理迭代器范围
Lambda表达式
[R, G, B](pcl::PointXYZRGB& point) { point.r = R, point.g = G, point.b = B;
}
等价
void clusterColor(pcl::PointCloud<pcl::PointXYZRGB>::Ptr& ccloud) {uint8_t R = rand() % 256;uint8_t G = rand() % 256;uint8_t B = rand() % 256;for(size_t i = 0; i < ccloud->size(); ++i) {(*ccloud)[i].r = R;(*ccloud)[i].g = G; (*ccloud)[i].b = B;}
}
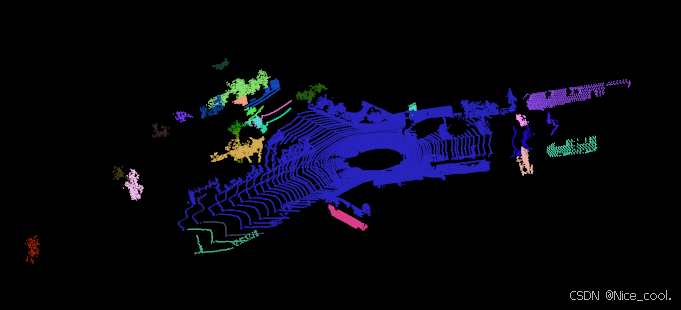
效果