SICAR标准功能块 FB1514 “Robot_request_FB”
1、功能块截图
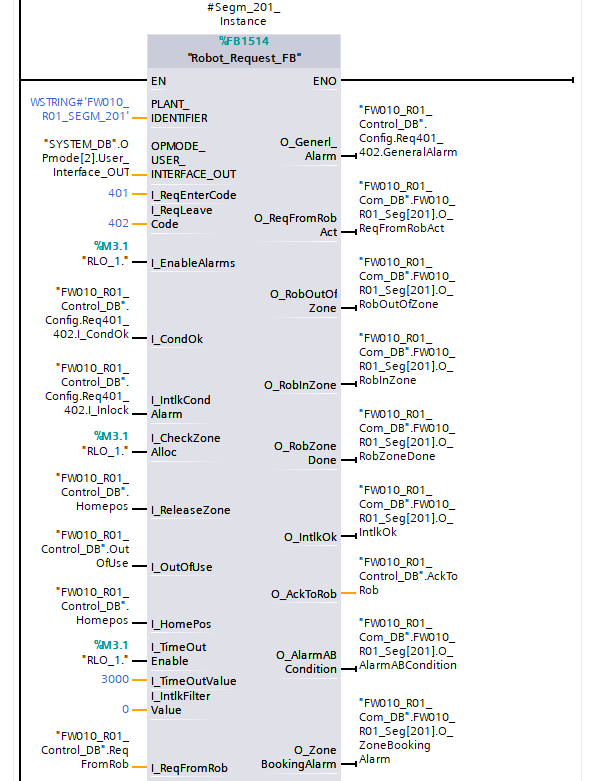
2、引脚功能描述
输入引脚:
- EN:使能输入,控制功能块运行。
- PLANT_IDENTIFIER:工厂或设备标识符(如
#FWO10_RO1_SEGM_201),用于标识操作对象。 - OPMODE_USER:操作模式输入(用户模式)。
- INTERFACE_OUT:连接系统数据库的操作模式接口(
SYSTEM_DB.OPmode[2].User_Interface_OUT)。 - I_ReqEnterCode(401):请求进入区域的代码(401),触发进入操作。
- I_ReqLeaveCode(402):请求离开区域的代码(402),触发离开操作。
- I_EnableAlarms(%M3.1):使能报警功能,允许功能块触发报警。
- I_CondOk:条件确认输入,检查进入 / 离开区域的条件是否满足(如
FWO10_RO1_Control_DB.Config.Req401.402.I_CondOk)。 - I_AlarmCond:报警条件输入,监控互锁等状态(如
FWO10_RO1_Control_DB.Config.Req401.402.I_Inlock)。 - I_CheckZoneAlloc(%M3.1):检查区域分配状态,确认区域是否可分配。
- I_ReleaseZone:释放区域信号(关联
FWO10_RO1_Control_DB.Homepos),用于释放已分配区域。 - I_OutOfUse:设备超出使用状态输入(
FWO10_RO1_Control_DB.Out_OfUse)。 - I_HomePos:原点位置信号输入(
FWO10_RO1_Control_DB.Homepos),确认机器人是否回到原点。 - I_TimeOut(%M3.1):超时触发信号,配合
I_TimeOutValue(3000)设置超时时间(3000ms)。 - I_IntIktFilterValue(0):互锁过滤值输入,用于过滤无效互锁信号。
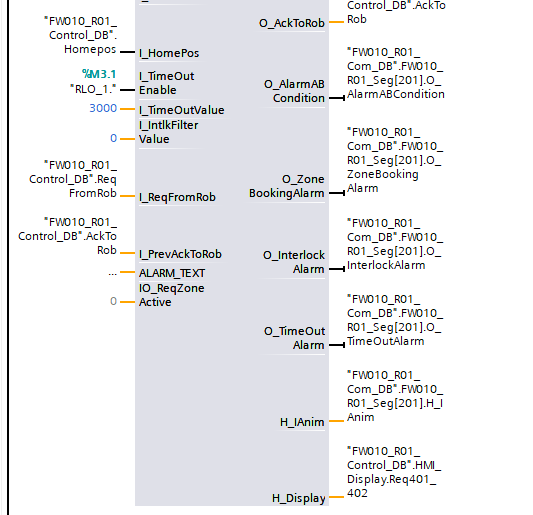
- I_ReqFromRob:接收机器人请求输入(
FWO10_RO1_Control_DB.From_Req)。 - L_PrevAckToRob:记录之前向机器人发送的确认信号,用于状态跟踪。
输出引脚:
- O_General_Config.Req401:通用配置输出,用于配置请求 401 相关参数。
- O_Alarm_402.General_Alarm:402 通用报警输出,触发与离开请求相关的报警。
- O_ReqFromRobAct:机器人请求动作输出(如
FWO10_RO1_Com_DB.FWO10_RO1_Seg[201].O_ReqFromRobAct),驱动机器人执行动作。 - O_RobOutOfZone:机器人超出区域状态输出,指示机器人是否在区域外。
- O_RobInZone:机器人在区域内状态输出,确认机器人是否在指定区域内。
- O_RobZoneDone:机器人区域操作完成输出,表明区域内任务已完成。
- O_IntIktOk:互锁状态确认输出(OK),表示互锁条件满足。
- O_AckToRob:向机器人发送确认信号(
FWO10_RO1_Control_DB.AckToRob),确认接收请求或操作完成。 - O_AlarmABCondition:报警 AB 条件输出,触发特定报警逻辑。
- O_ZoneBookingAlarm:区域预订报警输出,提示区域预订冲突或异常。
- O_InterlockAlarm:互锁报警输出,指示互锁条件不满足(新增于第二张图)。
- O_TimeOutAlarm:超时报警输出,当
I_TimeOut触发且超时时间到达时激活(新增于第二张图)。 - H_IAnim:关联动画显示输出,可能用于触发设备动画(如
FWO10_RO1_Com_DB.FWO10_RO1_Seg[201].H_IAnim)。 - H_Display:关联 HMI 显示输出(如
FWO10_RO1_Control_DB.HMI_Display.Req401_402),用于界面显示请求 401/402 的状态。
3、功能块功能描述
该功能块通过上述输入引脚监控机器人请求、区域状态、报警条件等,通过输出引脚控制机器人动作、反馈状态、触发报警及驱动界面显示,实现机器人在特定区域的安全、规范操作。