Opencv图像处理:模板匹配对象
文章目录
- 一、模板匹配
- 1、什么是模板匹配?
- 2、原理
- 二、单模板匹配(代码实现)
- 1、预处理
- 2、 开始模板匹配并绘制匹配位置的外接矩形
- 三、多模板匹配(代码实现)
- 1、读取图片和模板
- 2、模板匹配
- 3、设置阈值
- 1)阈值设置原理:
- 2)threshold=0.9
- 3)loc = np.where(res >= threshold)
- 4)for pt in zip(*loc[::-1]): cv2.rectangle(img_rgb,pt,(pt[0]+w,pt[1]+h),(0,0,255),1)
- 4、运行结果
一、模板匹配
1、什么是模板匹配?
模板匹配是OpenCV中的一种图像处理技术,用于在一幅图像中查找与给定模板或样本图像最相似的区域。
2、原理
为了识别匹配区域,我们必须通过滑动来将模板图像与源图像进行比较:
一次移动一个像素(从左到右,从上到下)。在每个位置,都会计算一个度量(度量计算公式),以便它表示该位置的匹配“好”或“坏”程度。

模板从图片的左上角逐一进行匹配,针对每一个匹配位置(位置坐标是模板左上角坐标),都会根据 matchTemplate()函数设置的计算方法得到一个对应的得分值,不同的匹配方法数值大小的效果是不同的,找到最优的匹配结果返回。
函数API:
cv2.matchTemplate(image, templ, method, result=None, mask=None)
- image:待搜索图像
- templ:模板图像
- method:计算匹配程度的方法,可以有:
- TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;匹配越好,值越小;匹配越差,值越大。
- TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
- TM_CCOEFF 相关系数匹配法:数值越大表明匹配程度越好。
- TM_SQDIFF_NORMED 归一化平方差匹配法,匹配越好,值越小;匹配越差,值越大。
- TM_CCORR_NORMED 归一化相关匹配法,数值越大表明匹配程度越好。
- TM_CCOEFF_NORMED 归一化相关系数匹配法,数值越大表明匹配程度越好。
- 返回匹配结果的矩阵,其中每个元素表示该位置与模板的匹配程度
二、单模板匹配(代码实现)
1、预处理
kele = cv2.imread('kele.png')
template = cv2.imread('template.png')
cv2.imshow('kele',kele)
cv2.imshow('template',template)
cv2.waitKey(0)

2、 开始模板匹配并绘制匹配位置的外接矩形
h, w = template.shape[:2]
res = cv2.matchTemplate(kele, template, cv2.TM_CCOEFF_NORMED) #返回匹配结果的矩阵,其中每个元素表示该位置与模板的匹配程度
# cv2.minMaxLoc可以获取矩阵中的最小值和最大值,以及最小值的索引号和最大值的索引号
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 最小值、最大值、最小值位置、最大值位置
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
kele_template = cv2.rectangle(kele, top_left, bottom_right, (0, 255, 0), 2) # 绘制矩形cv2.imshow('kele_template', kele_template)
cv2.waitKey(0)

三、多模板匹配(代码实现)
模板:

原图:
1、读取图片和模板
img_rgb=cv2.imread('image.jpg')
img_gray=cv2.cvtColor(img_rgb,cv2.COLOR_BGR2GRAY)
template=cv2.imread('tem.jpg',0)
h,w=template.shape[:2]
2、模板匹配
def find_temp(temp):res=cv2.matchTemplate(img_gray,temp,cv2.TM_CCOEFF_NORMED)threshold=0.9loc=np.where(res>=threshold)for pt in zip(*loc[::-1]):cv2.rectangle(img_rgb,pt,(pt[0]+w,pt[1]+h),(0,0,255),1)find_temp(template)cv2.imshow('', img_rgb)
cv2.waitKey(0)
3、设置阈值
1)阈值设置原理:
在进行多对象匹配时,常常要设置阈值保证能够完全框选到对象,当阈值设置为0.9时,所有满足大于0.9的外接矩形都会被绘制出来,如果这个阈值数据设置的更小,那么符合条件的位置就越多,表现在图上的特征就是有更多的框,框的线更粗。
2)threshold=0.9
设定匹配阈值,表示匹配的相似度范围。
3)loc = np.where(res >= threshold)
获取匹配结果中所有符合阈值的点的坐标,返回索引,这里返回的是y值和x值坐标信息,条件为大于设定阈值的值的索引。
4)for pt in zip(*loc[::-1]): cv2.rectangle(img_rgb,pt,(pt[0]+w,pt[1]+h),(0,0,255),1)
- loc数据倒序排列,变成x,y顺序状态,zip(*)表示将可迭代对象中对应的元素打包成一个元组,这里表示返回每个点的坐标。
- 在原图上绘制匹配区域的矩形框,pt表示矩形左上角坐标,(pt[0]+w,pt[1]+h)表示右下角坐标。
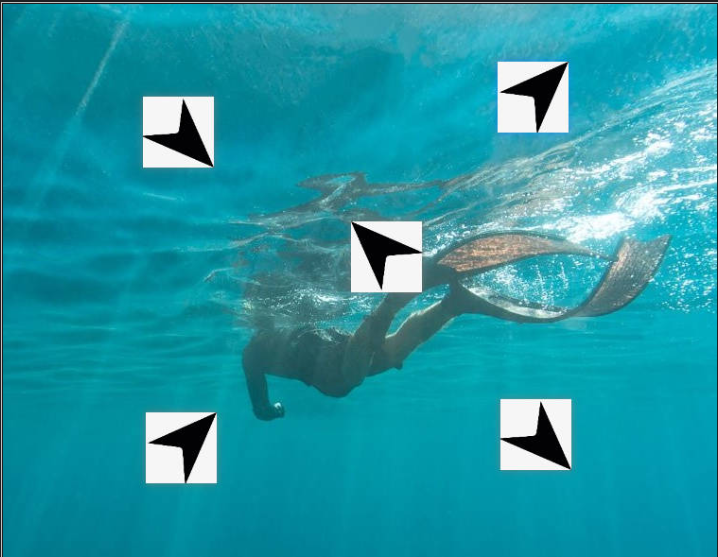
4、运行结果