【多智能体系统组织方式解析】五大架构赋能智能协作
引言:协作的“骨架”决定效率
在多智能体系统中,组织方式如同人类社会的治理模式——它决定了智能体如何通信、协作与分配权力。一个设计精妙的组织结构,可以让分散的个体像精密齿轮般咬合,而混乱的结构则可能导致资源浪费甚至系统崩溃。
本文将深入解析多智能体系统的五大经典组织方式,揭示它们的特点、适用场景与潜在陷阱,助你找到复杂任务下的最优协作框架。
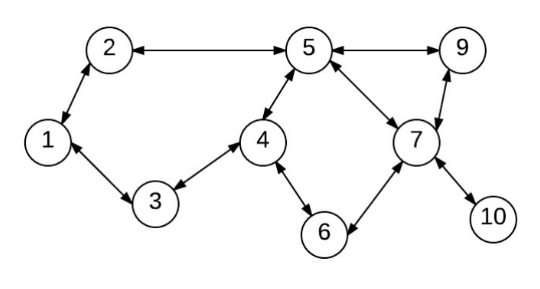
一、扁平结构:平等自治的乌托邦
核心特征:
-
无中心领导:所有智能体地位平等,直接与邻居通信。
-
分布式决策:每个智能体基于局部信息自主行动。
运作逻辑:
Agent A ↔ Agent B ↔ Agent C (所有通信仅通过相邻节点传递)
适用场景:
-
分布式传感器网络(如森林火灾监测)。
-
区块链节点共识(比特币网络)。
优势:
-
高容错性(无单点故障)。
-
低通信延迟(仅需局部交互)。
挑战:
-
全局协调困难(如大规模路径规划)。
-
易陷入“局部最优”(缺乏宏观视野)。
案例:
一群蜜蜂通过信息素传递(局部通信)寻找新巢穴,无需蜂王指挥。
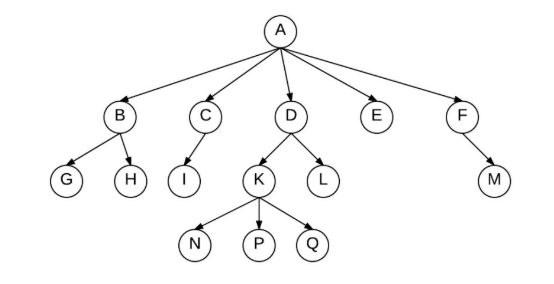
二、层级结构:金字塔的权力游戏
核心特征:
-
树状层级:根代理(Root Agent)位于顶端,子代理逐级控制。
-
集中控制:父代理管理子代理的通信与任务分配。
两种模式:
| 类型 | 控制权归属 | 适用场景 |
|---|---|---|
| 简单层级 | 根代理独占控制权 | 工厂流水线(中央调度) |
| 统一层级 | 各级父代理分权管理 | 跨国企业区域化管理 |
运作逻辑:
Root Agent (A) / \ Parent Agent (B) / \ Leaf Agent (G) Leaf Agent (H)
优势:
-
任务分配明确,适合目标高度统一的场景。
-
便于全局优化(如电网负荷调度)。
缺陷:
-
根代理可能成为性能瓶颈。
-
底层代理缺乏自主性(如交通信号灯依赖中心服务器)。
改进策略:
-
动态选举根代理(如无人机编队轮流领航)。
-
引入冗余父代理(防止单点故障)。
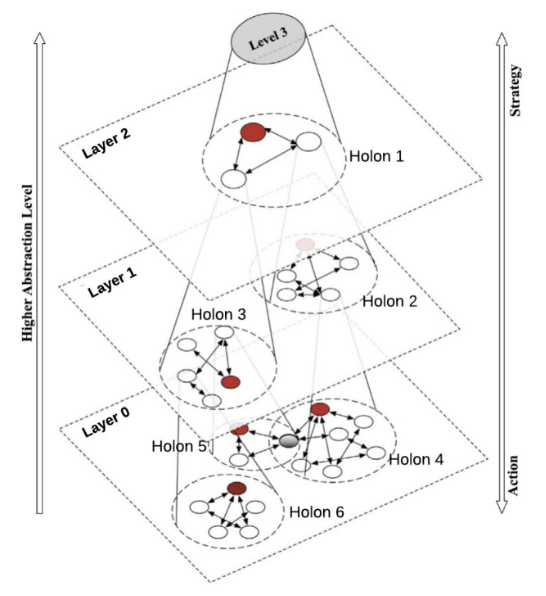
三、单元结构(Holonic):模块化协作的艺术
核心特征:
-
分层单元:智能体按功能/能力组成“单元(Holon)”,单元可嵌套多层。
-
跨层通信:单元内自由交互,跨层通过“头代理(Head Agent)”协调。
典型结构:
Layer 2: Holon 1 (Head Agent) ↔ Holon 2 Layer 1: Holon 3 ↔ Holon 4 ↔ Holon 5 Layer 0: Agent A(属于Holon4 & Holon5)
适用场景:
-
智能制造(单元化生产线)。
-
智慧城市(交通、能源、安防多子系统协同)。
优势:
-
兼顾灵活性与可控性。
-
资源复用(如一个传感器Agent可服务于多个单元)。
挑战:
-
头代理选举机制复杂(需动态评估资源能力)。
-
跨单元冲突协调成本高。
案例:
物流仓库中,搬运机器人(Layer 0)→ 区域调度单元(Layer 1)→ 中央管理系统(Layer 2)。
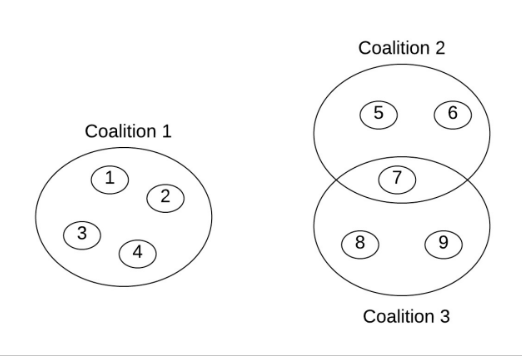
四、联盟组织:临时结盟的江湖规则
核心特征:
-
动态组队:智能体为短期目标临时结盟,任务完成后解散。
-
内部扁平:联盟内通常平等协作,也可嵌套其他结构。
运作流程:
目标出现 → 寻找盟友 → 组建联盟 → 执行任务 → 解散
适用场景:
-
灾害救援(救护车临时组队覆盖区域)。
-
动态定价系统(电商平台商家竞价联盟)。
优势:
-
资源按需聚合,降低常态协作开销。
-
适应突发任务(如网络攻击应急响应)。
权衡点:
-
联盟组建开销:寻找盟友的通信与计算成本。
-
利益分配:如何公平分配任务成果(如救援中谁优先获得补给)。
设计技巧:
-
预设联盟模板(如灾难类型→ 所需Agent类型库)。
-
引入信誉机制(优先选择历史协作高效的Agent)。
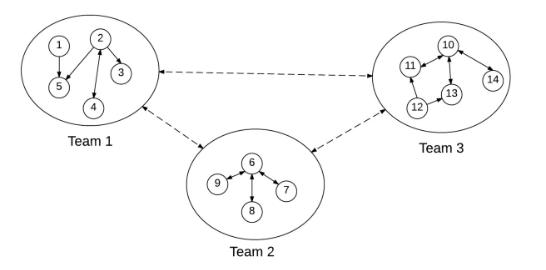
五、团队组织:为共同使命而战
核心特征:
-
统一目标:团队目标优先于个体目标。
-
规模权衡:大团队数据丰富但决策慢,小团队反之。
与联盟的核心区别:
| 维度 | 联盟 | 团队 |
|---|---|---|
| 目标性质 | 个体目标协同达成 | 团队目标优先 |
| 存续时间 | 短期任务导向 | 中长期任务导向 |
| 内部结构 | 通常扁平 | 可嵌套层级/单元结构 |
适用场景:
-
太空探索(火星车团队协同采样)。
-
医疗手术(手术机器人+影像诊断AI联合团队)。
关键决策:
-
团队规模:
-
大数据分析任务 → 大规模团队(如气候预测)。
-
实时控制任务 → 小规模精英团队(如无人机特技表演)。
-
六、如何选择最佳组织方式?
| 场景特征 | 推荐结构 | 典型案例 |
|---|---|---|
| 环境稳定、任务简单 | 扁平结构 | 物联网设备监控网络 |
| 目标统一、需集中控制 | 层级结构 | 工业机器人流水线 |
| 模块化任务、跨域协同 | 单元结构 | 智慧城市多子系统管理 |
| 突发任务、动态资源需求 | 联盟组织 | 网络安全应急响应 |
| 长期复杂任务、强目标一致性 | 团队组织 | 自动驾驶车队长途运输 |
黄金法则:
-
从目标出发:短期动态目标选联盟,长期复杂目标建团队。
-
评估环境:稳定环境用层级,动态环境用扁平或联盟。
-
平衡开销:单元结构适合模块化系统,避免过度设计。
结语:没有最好,只有最合适
多智能体系统的组织方式,本质是权力、效率与灵活性的三角博弈。未来的MAS或将融合多种模式——平时以单元结构运行,遇到突发任务动态切换为联盟,而关键任务时升级为团队。
当智能体不仅能自主行动,还能自主“选择如何协作”,我们便真正迈向了自组织智能的新纪元。
讨论话题:如果你要设计一个外卖配送MAS,你会选择哪种组织方式?为什么?欢迎分享你的设计思路!