MATLAB技巧——平滑滤波,给出一定的例程和输出参考
文章给出若干种MATLAB用来平滑滤波的方法。并给出一定的例程和输出参考。
方法比较多,在实际选择平滑方法时,需根据数据特性(如噪声类型、平滑程度需求)来决定最适合的技术。
文章目录
- smooth函数
- 语法
- 示例:移动平均平滑
- Savitzky-Golay 滤波 (sgolayfilt)
- 语法
- 示例:Savitzky-Golay 滤波
- 自定义移动平均滤波
- 自定义移动平均平滑
- 使用滤波器设计平滑滤波
- 低通滤波器
- 卷积实现平滑
- 示例:卷积平滑
- 总结
在 MATLAB 中,平滑滤波是一种用于去除数据噪声、提取信号趋势的技术。以下是 MATLAB 中常用的平滑滤波方法及其示例:
smooth函数
smooth 是 MATLAB 提供的专用平滑函数,支持多种平滑方法,如移动平均、局部加权回归等。
语法
smoothedData = smooth(data, span, method)
data: 输入数据(向量)。span: 平滑窗口的大小(数据点数)。method: 平滑方法(可选),包括:'moving'(默认值):移动平均。'lowess':局部加权线性回归。'loess':局部加权二次回归。'sgolay':Savitzky-Golay 滤波。'rlowess':鲁棒的局部加权线性回归。'rloess':鲁棒的局部加权二次回归。
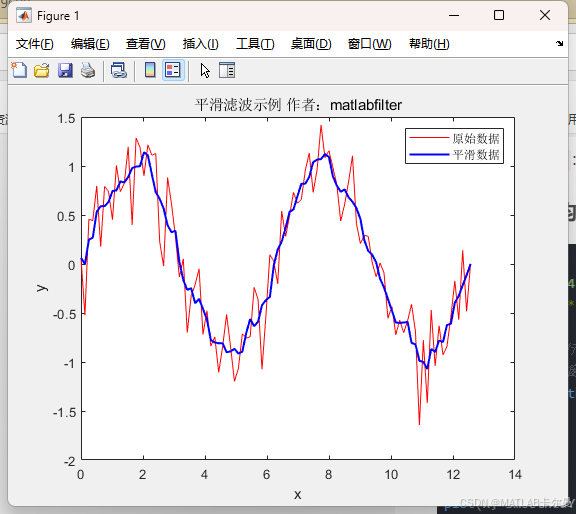
示例:移动平均平滑
% 原始数据
x = linspace(0, 4*pi, 100);
y = sin(x) + 0.3*randn(size(x)); % 添加噪声的正弦波% 使用 smooth 进行平滑
span = 5; % 平滑窗口
smoothedY = smooth(y, span, 'moving'); % 移动平均平滑% 可视化
plot(x, y, 'r-', 'DisplayName', '原始数据');
hold on;
plot(x, smoothedY, 'b-', 'LineWidth', 1.5, 'DisplayName', '平滑数据');
legend;
title('平滑滤波示例 作者:matlabfilter');
xlabel('x');
ylabel('y');
Savitzky-Golay 滤波 (sgolayfilt)
Savitzky-Golay 滤波是一种保留信号特性的平滑方法,适合处理非线性数据。
语法
smoothedData = sgolayfilt(data, order, framelen)
order:多项式拟合的阶数(通常为 2 或 3)。framelen:滤波窗口的长度,必须是奇数。
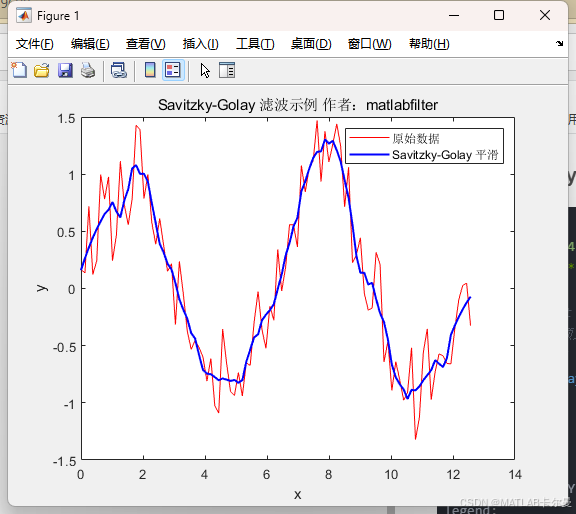
示例:Savitzky-Golay 滤波
% 原始数据
x = linspace(0, 4*pi, 100);
y = sin(x) + 0.3*randn(size(x)); % 添加噪声的正弦波% 使用 sgolayfilt 滤波
order = 2; % 多项式阶数
framelen = 11; % 滤波窗口长度(奇数)
smoothedY = sgolayfilt(y, order, framelen);% 可视化
plot(x, y, 'r-', 'DisplayName', '原始数据');
hold on;
plot(x, smoothedY, 'b-', 'LineWidth', 1.5, 'DisplayName', 'Savitzky-Golay 平滑');
legend;
title('Savitzky-Golay 滤波示例 作者:matlabfilter');
xlabel('x');
ylabel('y');
自定义移动平均滤波
如果不使用 smooth 函数,可以自行实现简单的移动平均滤波。
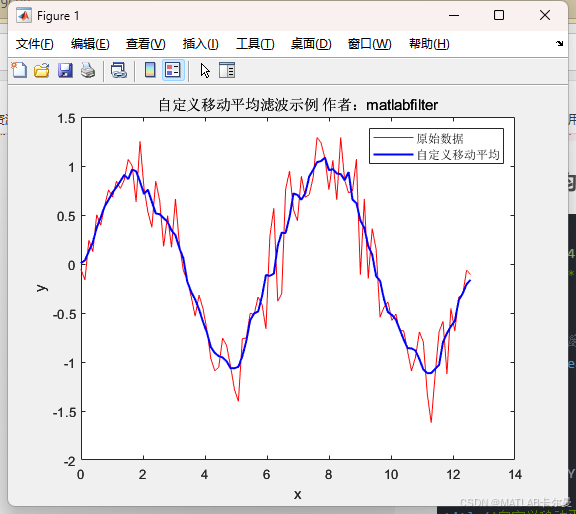
自定义移动平均平滑
% 原始数据
x = linspace(0, 4*pi, 100);
y = sin(x) + 0.3*randn(size(x)); % 添加噪声的正弦波% 自定义移动平均
span = 5; % 平滑窗口
smoothedY = movmean(y, span); % 或使用 filter% 可视化
plot(x, y, 'r-', 'DisplayName', '原始数据');
hold on;
plot(x, smoothedY, 'b-', 'LineWidth', 1.5, 'DisplayName', '自定义移动平均');
legend;
title('自定义移动平均滤波示例 作者:matlabfilter');
xlabel('x');
ylabel('y');
使用滤波器设计平滑滤波
可以使用低通滤波器对数据进行平滑。MATLAB 提供了多种滤波器设计工具,如 butter、filtfilt 等。
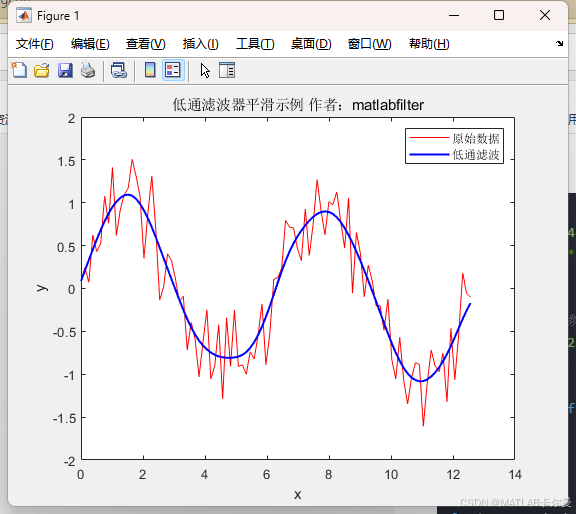
低通滤波器
% 原始数据
x = linspace(0, 4*pi, 100);
y = sin(x) + 0.3*randn(size(x)); % 添加噪声的正弦波% 设计低通滤波器
fc = 0.1; % 截止频率(归一化到 Nyquist 频率)
[b, a] = butter(2, fc); % 二阶巴特沃斯滤波器% 应用滤波器
smoothedY = filtfilt(b, a, y); % 零相位滤波% 可视化
plot(x, y, 'r-', 'DisplayName', '原始数据');
hold on;
plot(x, smoothedY, 'b-', 'LineWidth', 1.5, 'DisplayName', '低通滤波');
legend;
title('低通滤波器平滑示例 作者:matlabfilter');
xlabel('x');
ylabel('y');
卷积实现平滑
用均值核或高斯核实现平滑。
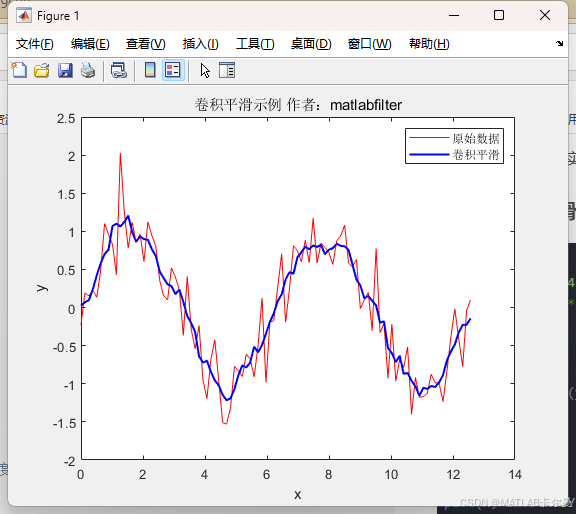
示例:卷积平滑
% 原始数据
x = linspace(0, 4*pi, 100);
y = sin(x) + 0.3*randn(size(x)); % 添加噪声的正弦波% 卷积平滑
kernel = ones(1, 5) / 5; % 均值核
smoothedY = conv(y, kernel, 'same'); % 'same' 保持输出长度% 可视化
plot(x, y, 'r-', 'DisplayName', '原始数据');
hold on;
plot(x, smoothedY, 'b-', 'LineWidth', 1.5, 'DisplayName', '卷积平滑');
legend;
title('卷积平滑示例 作者:matlabfilter');
xlabel('x');
ylabel('y');
总结
- 简单平滑:使用
smooth或movmean。 - 高精度平滑:使用
sgolayfilt或自定义低通滤波器。 - 灵活平滑:使用卷积或滤波器设计。
选择平滑方法时,需根据数据特性(如噪声类型、平滑程度需求)来决定最适合的技术。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者