MATLAB 控制系统设计与仿真 - 41
鲁棒控制的其他函数 - 回路成型函数 loopsyn
灵敏度问题由鲁棒控制工具箱中的loopsyn就可以直接求解,该函数采用H无穷回路成型算法设计控制器,函数的调用格式为:
[K,CL,gamma,info] = loopsyn(G,Gd) % G为受控对象模型% Gd为期望的回路传递函数% K为回路成型控制器模型% CL为在该控制器下的闭环系统模型% gamma为成型精度,当gamma=1时表示设计出精确的成型控制器
[K,CL,gamma,info] = loopsyn(G,Gd,alpha) % alpha为[0 1]之间的数,当alpha趋于0时,% 设计出的控制器具有较好的闭环控制效果% 当alpha趋于1时,控制器具有较好的抗干扰能力
[K,CL,gamma,info] = loopsyn(G,Gd,alpha,ord) %orde可以用来设定控制器的阶数给定一下系统
选择两个回路的模型均为
试设计回路成型控制器。
实现的MATLAB代码如下:
clear all;clc;
g11=tf([0.806 0.264],[1 1.15 0.202]);
g12=tf([-15 -1.42],[1 12.8 13.6 2.36]);
g21=tf([1.95 2.12 0.49],[1 9.15 9.39 1.62]);
g22=tf([7.15 25.8 9.35],[1 20.8 116.4 111.6 18.8]);
G=[g11 g12; g21 g22];
s=tf('s');
Gd=500/(s+1);
[K,CL,gamma]=loopsyn(G,Gd);
figure(1)
step(CL,0.1);
hold on
step(feedback(G*K,eye(2)),0.1)
hold off
legend('step reponse of CL','step response of G*K/(1+G*K)')
figure(2)
bodemag(G*K,[Gd 0; 0 Gd])程序运行结果如下:
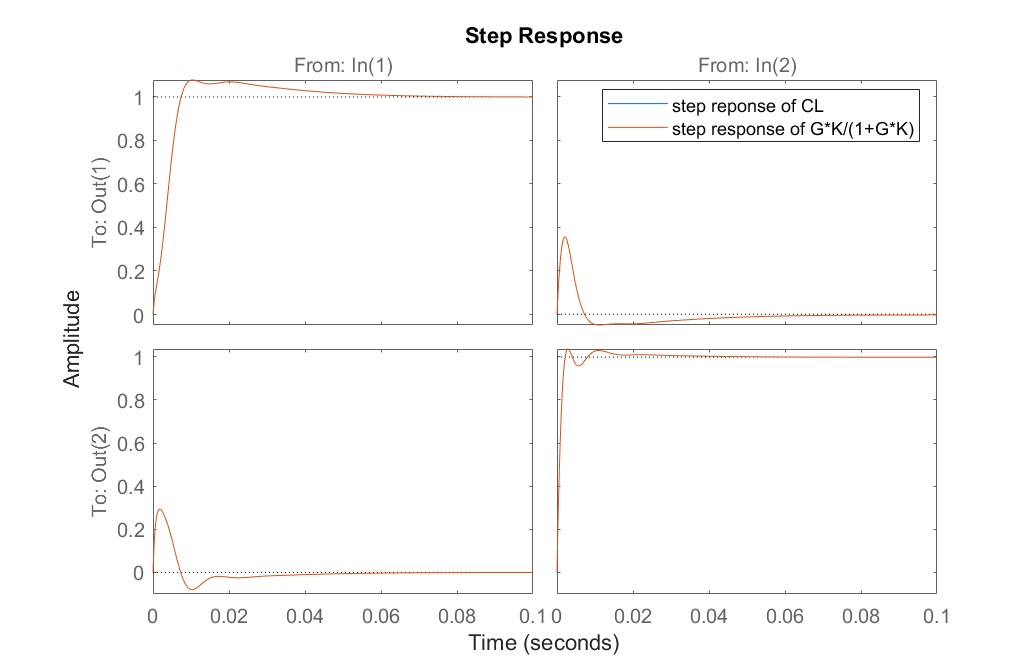
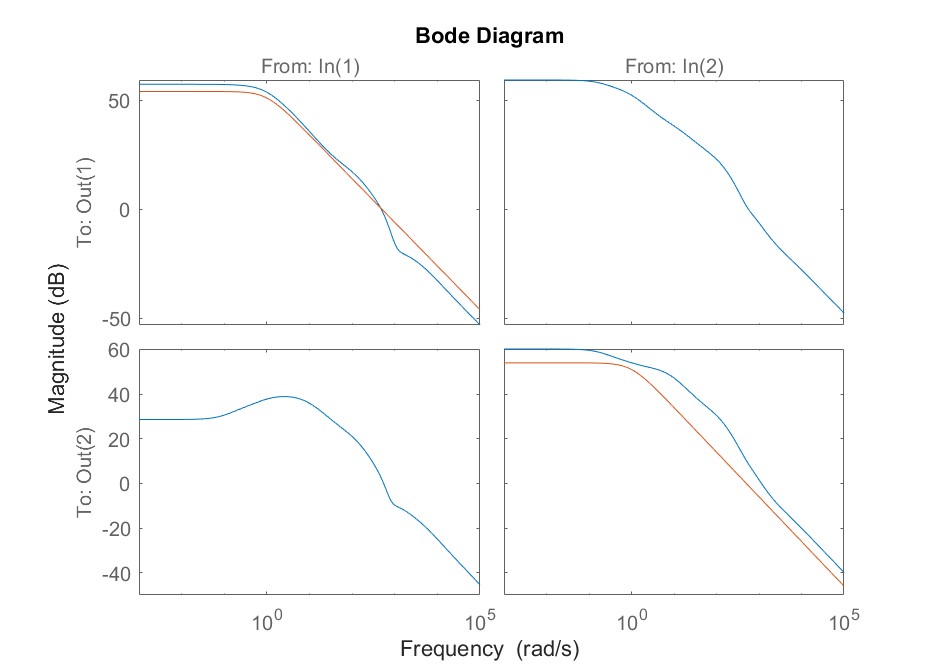
有结果可知,设计的效果一般,因为耦合度还是比较高的。
如果我们设计控制器时要求控制系统的系统优先于模型不确定性。可以做如下修改
[K,CL,gamma]=loopsyn(G,Gd,0.0001);
figure(1)
step(CL,0.1);
hold on
step(feedback(G*K,eye(2)),0.1)
hold off
legend('step reponse of CL','step response of G*K/(1+G*K)')
figure(2)
bodemag(G*K,[Gd 0; 0 Gd])程序运行结果如下:
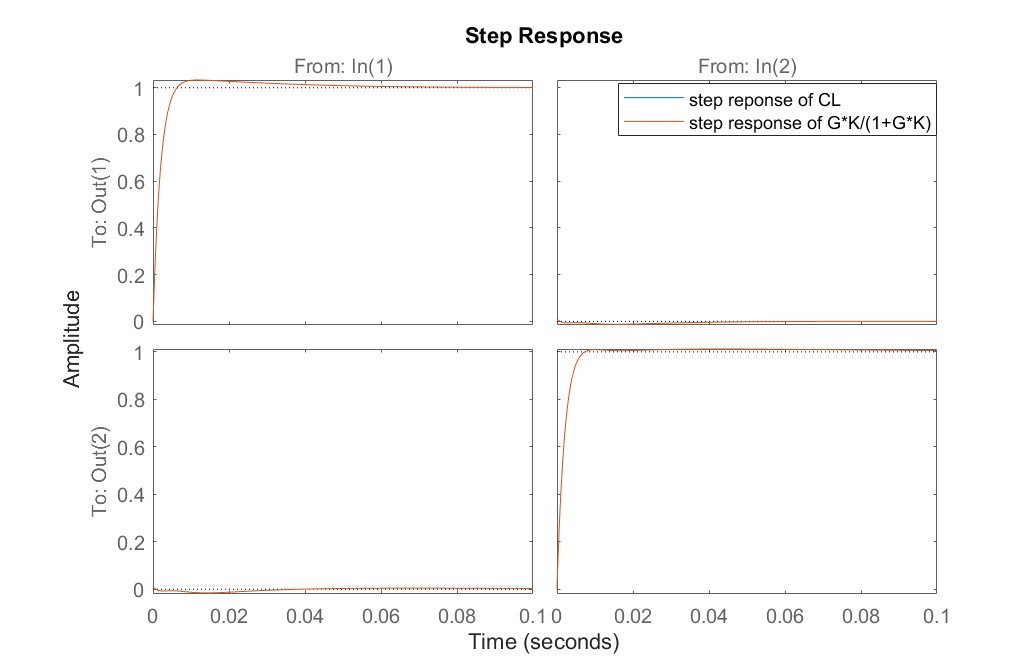
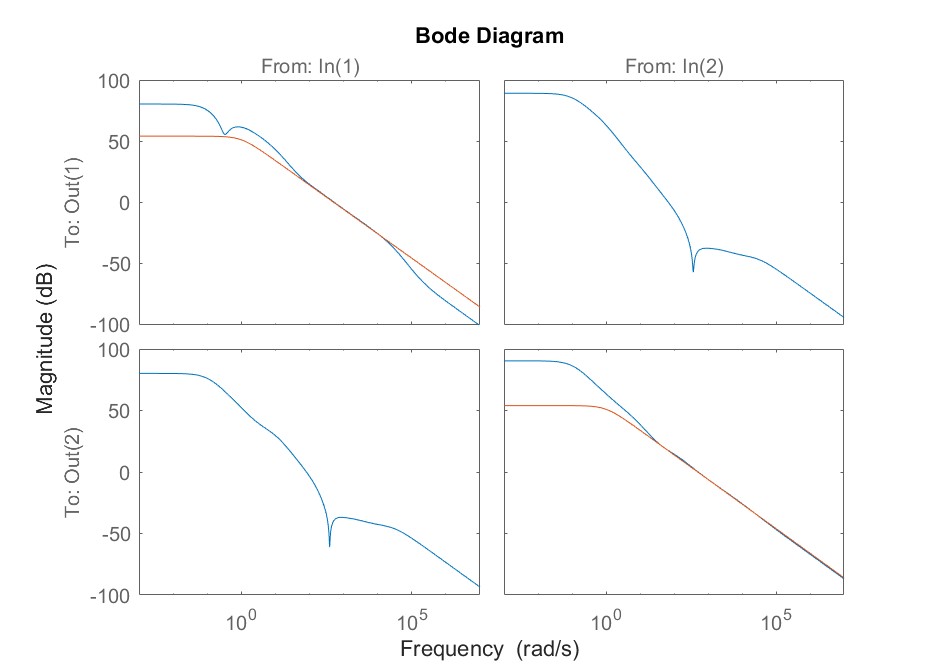
由上图可知,系统的耦合得到了大大改善,小伙伴们也可以自己画一下闭环系统的传递函数比较一下。但是在实际应用中,要考虑到系统的不确定性,否则系统会不稳定。
最后,欢迎大家有问题给我留言。
非常感谢小伙伴们的-点赞-收藏-加关注。