EtherCAT 模型(Reference Model)
@[TOC](EtherCAT 模型(Reference Model))
EtherCAT
EtherCAT 是 Ethernet for Control Automation Technology 的简称,是由德国倍福自动化有限公司(BECKHOFF)研发的通过实时以太网进行主站与从站间的开放网络通信,由 EtherCAT 技术协会(EtherCAT Technology Group)进行管理。
EtherCAT 可使用双绞线或光纤电缆进行连接。通过 EtherCAT 可以构建多种拓扑结构,比如总线拓扑结构、树形拓扑结构、菊花链式拓扑结构、蜂窝拓扑结构等。从主站发出的数据帧在经过从站时将读取 Output 数据,并以同样的方式插入 Input 数据。同时,由于通信协议遵守基于 IEEE802.3 的标准以太网协议,因此无需构建新的子总线用于 EtherCAT连接。
协议通过各个向以太网帧直接传送、多个子报文构成,各个报文及 4GB 过程映像,实现了广播和组播通信的功能。使用符合 100BASE-TX 标准的以太网时,缆线的最大长度可达到 100m,系统最多可容纳 65535 台子轴,因此整个网络规模几乎是无限制的。
此外,EtherCAT 还可通过交换机与普通的 TCP/IP 相互连接。
模型
OSI参考模型
OSI 参考模型(Open Systems Interconnection 七层结构)与 EtherCAT 通信模型的对比如下所示。在 EtherCAT 模型中没有第 3 层到第 6 层。
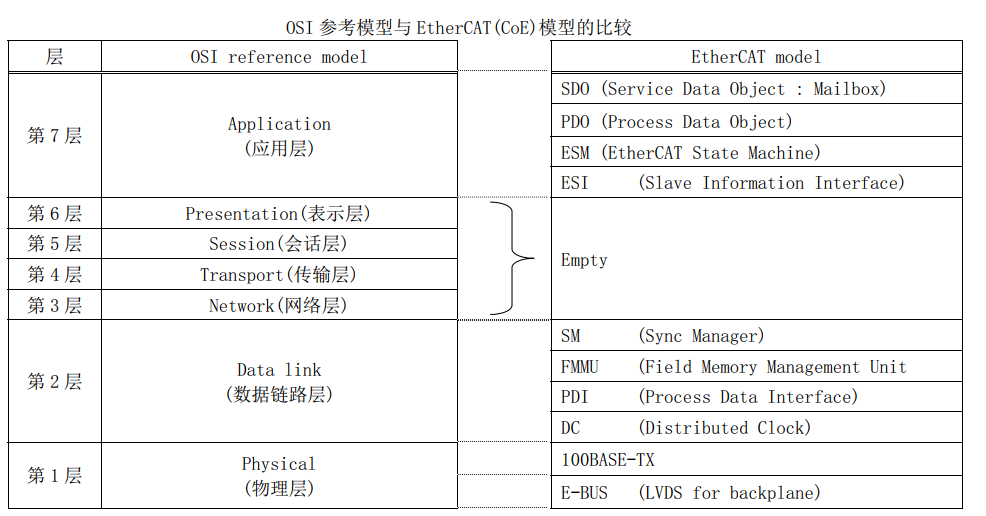
■ 第 1 层(物理层)
进行电气交换及机械作业,以便将数据输出到通信电路。该层中规定了引脚形状及电缆特性。
■ 第 2 层(数据链路层)
确保通信双方的物理通信路径,并检测通过路径的数据错误等。
■ 第 3 层(网络层)
进行通信路径的选择、通信路径内的地址管理等,以便将数据从发送方路由到接收方。
■ 第 4 层(传输层)
为保证发送方发送的数据可以正确且快速的发送到接收方,进行数据压缩,错误修正,重新发送数据等操作。
■ 第 5 层(会话层)
为进行程序间的数据收送进行建立/断开虚拟连接操作。
■ 第 6 层(表示层)
将从会话层中接收到的数据转化为适合用户使用的形式,将从应用层中接收到的数据转化为适用于通信的形式。
■ 第 7 层(应用层)
向用户及其他程序提供使用数据通信的各种服务。
设备构造
设置
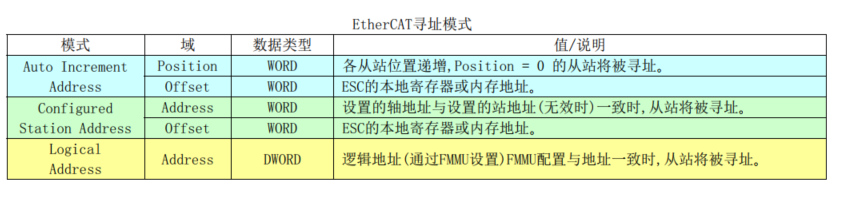
节点ID
以太网中的各从站设备都有各自固定的节点ID,一般来说,固定的节点ID可在位置寻址模式中进行设置。
除节点ID以外,还可通过驱动器正面的4 bit旋转开关(0x0~0xF:bit 3~0)和预置在伺服驱动器内的非易失
性存储器中写入的(使用R2设置软件写入)bit 15~4的设置数值设置轴的地址,设置范围为0~65535。
设置值将在控制电源上电后写入地址空间的站别名设置寄存器(0x0012)中。在控制电源ON的状态下修改轴的地址时,要使新修改的地址生效需重启电源。
物理通信规格
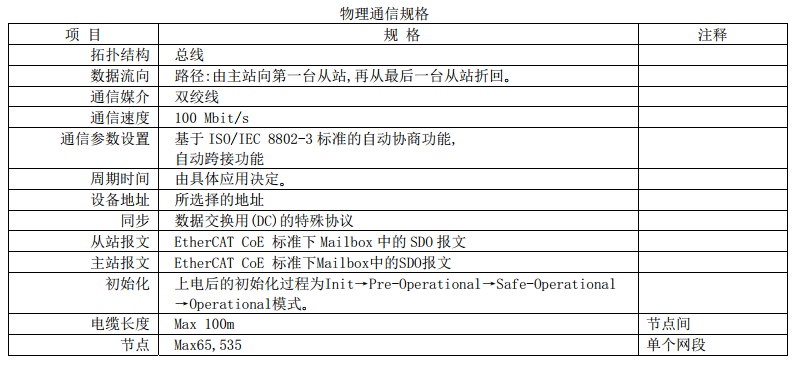
通信规格
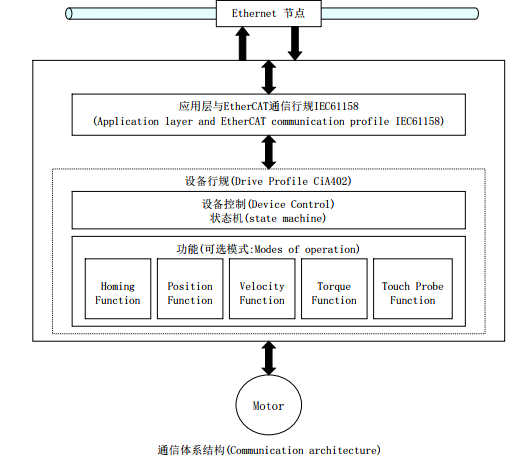
设备模型
■ Communication
此功能单元包括通过基础网络结构进行数据传输的各项功能。
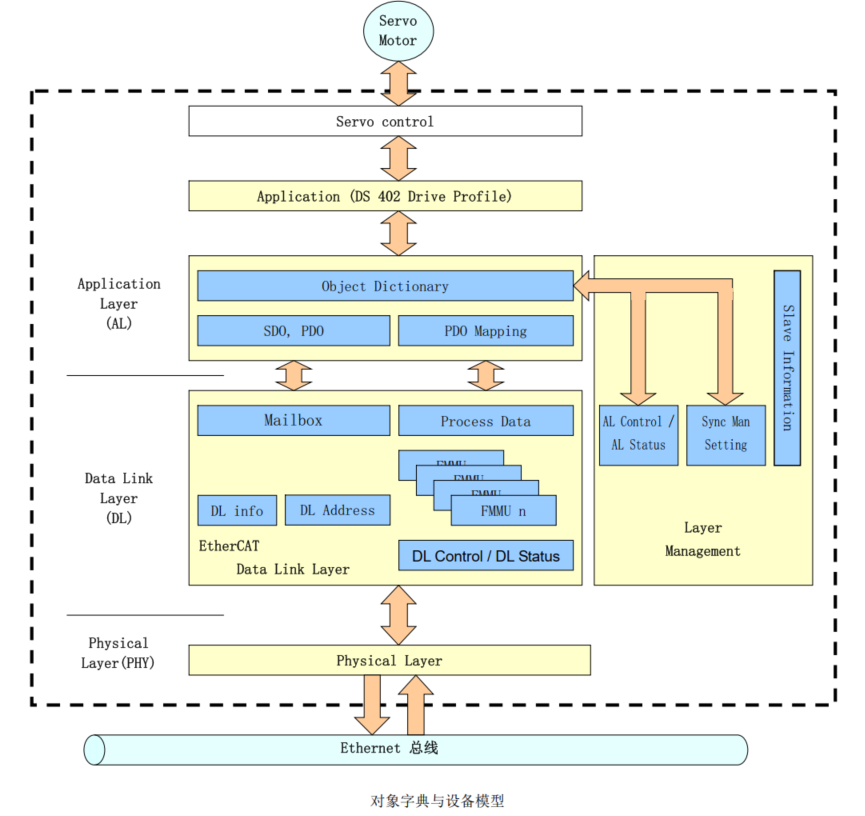
■ Object Dictionary
使用对象字典将对应用对象、通信对象及使用该设备的状态机产生影响。
■ Application
应用包括与动作环境相适应的进行数据交换的通信设备功能。
对象字典具有作为通信与应用间的接口的功能。
对设备应用的说明称为“设备行规”,设备行规中把对象字典的各个数据作为说明的条目。
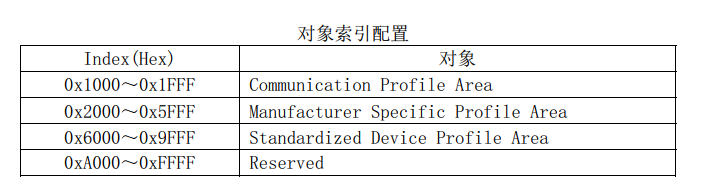
■ 对象索引(Object Index)
所有的对象都使用4位16进制的16bit索引进行定位。
对象被按组配置在对象字典中。
CoE中规定的对象字典概要如下所示。
通信
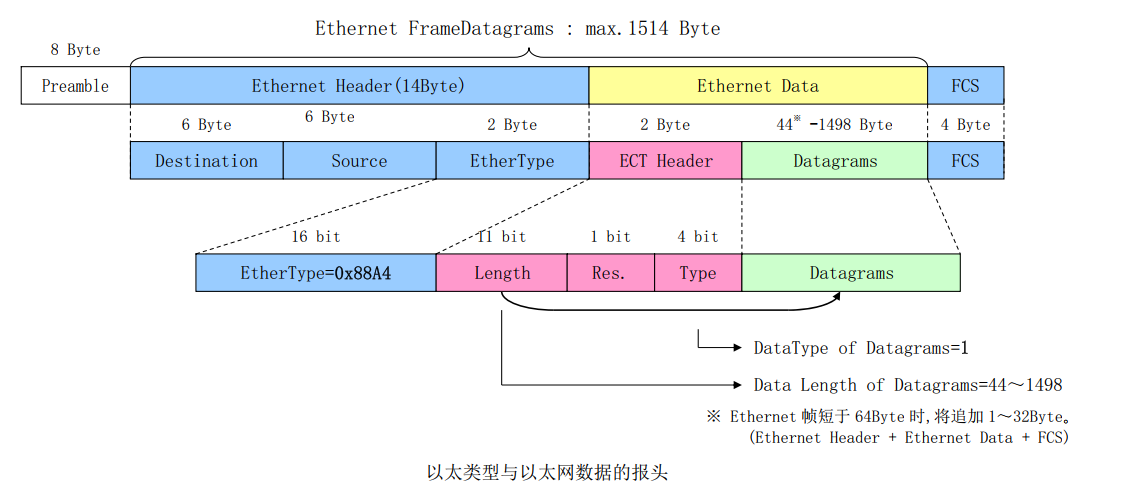
■ Ethernet 协议
由于EtherCAT采用了IEEE 802.3标准的以太网帧,因此可以使用标准的网络控制器。 所以主站侧无需另外搭设硬件即可构建系统。EtherCAT的预设Ether Type为“0x88A4”,以区别于其他以太网帧。此外,EtherCAT不需要使用IP协议。 数据帧对EtherCAT数据报进行定义,并根据EtherCAT帧头进行更详细的分类。 只有EtherCAT帧头为Type“1”的EtherCAT帧将被从站设备处理。
EtherCAT协议
为了更便捷地构建网络,IEC61158EtherCAT 通信行规中对作为默认值的指令进行了标准化的规定。网络中的各个节点
都被分配给一个地址,因此每个节点都可以使用同个以太网中的 EtherCAT 数据报。帧最终以 EtherCAT 数据报结束。
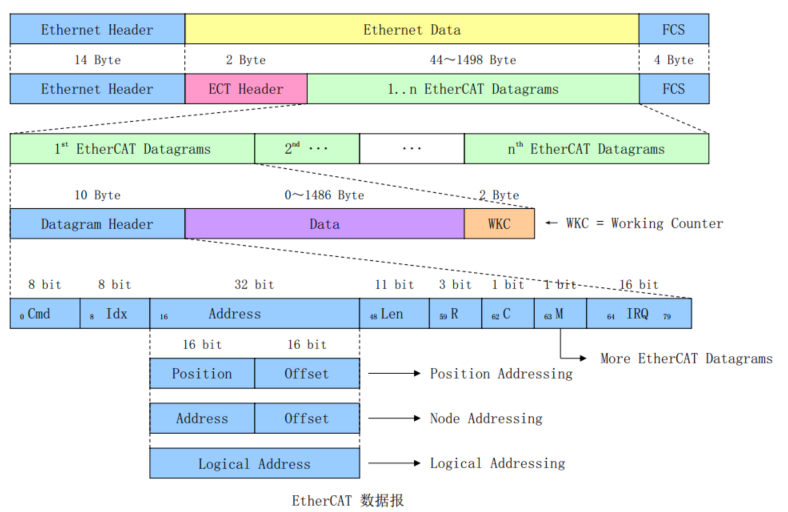
数据报头
数据报前端的 10 Byte 数据报头决定了后续数据将被如何处理。
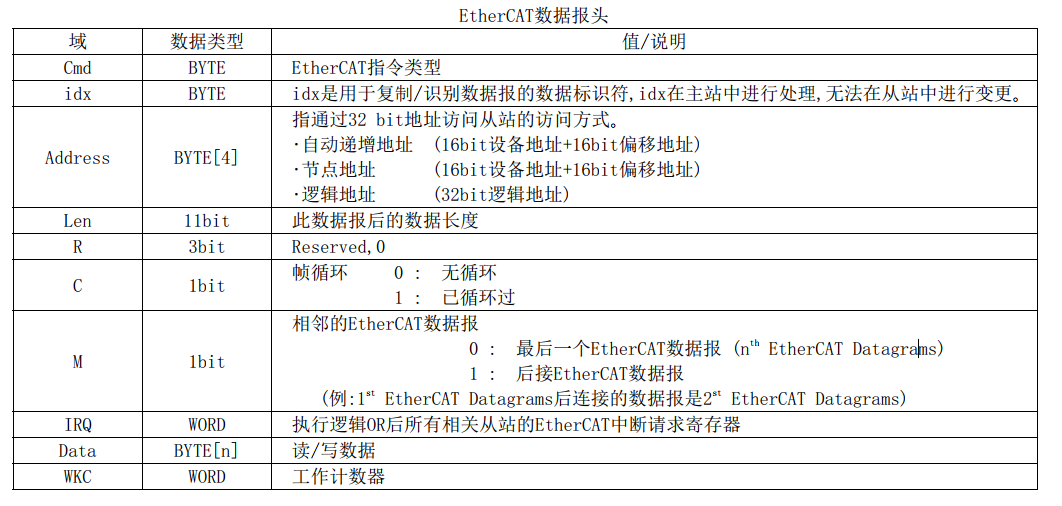
指令类型
EtherCAT 数据报前端的 8 bit 指令类型决定了后续“Address”及访问方式。EtherCAT 指令类型列表如下所示。读写
操作、读取操作将在写入操作前执行。

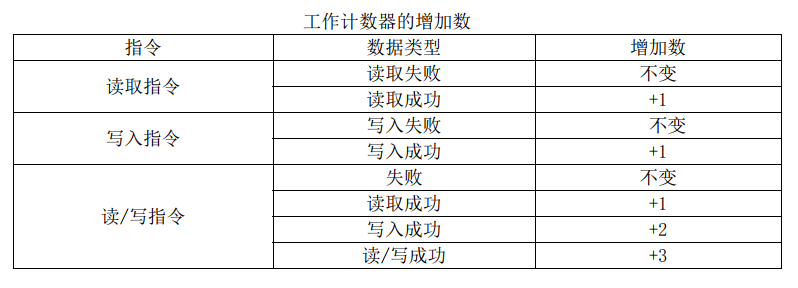
WKC(工作计数器)
每个 EtherCAT 数据报都以 16bit 的工作计数器(WKC)结束。工作计数器计算被 EtherCAT 数据报正常访问的设备台数。
同时,从站驱动器中搭载的 ESC(硬件)也将递增工作计数器的数值。
每个数据报都应有通过主站预计出的工作计数器的数值。
主站通过对比向各从站发出的指令与 WKC 的目标值和实际计算结果,对 EtherCAT 数据报是否执行了处理进行确认。
各指令与工作计数器的递增过程如下表所示。
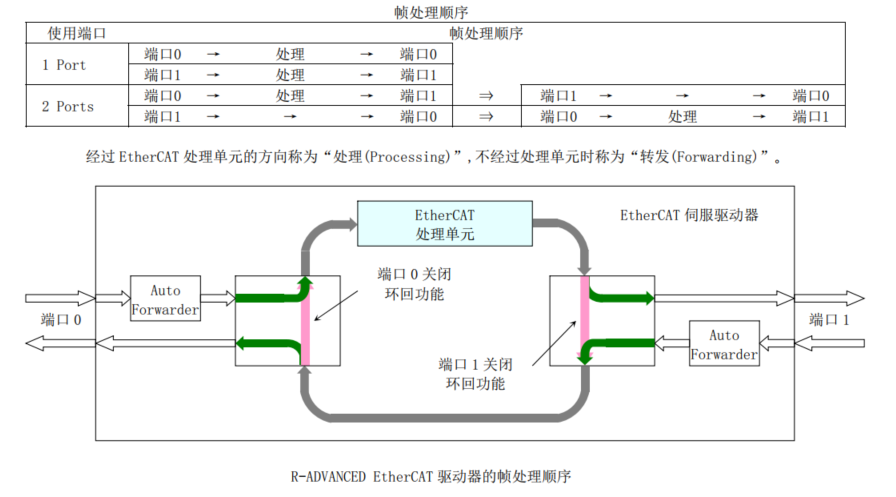
帧处理
R-ADVANCED EtherCAT 驱动器有 2 个端口,帧处理顺序(Processing)由逻辑端口编号决定。