图像预处理-图像轮廓特征查找
其实就是外接轮廓,有了轮廓点就可以找到最上、最下、最左、最右的四个坐标(因为有xmin,xmax,ymin,ymax)。就可以绘制出矩形。
一.外接矩形
cv.boundingRect(轮廓点)
- 返回x,y,w,h,传入一个轮廓的轮廓点,若有多个轮廓需要循环获取。
这是最简单的外接矩形,理论上是方方正正的。
import cv2 as cvnum = cv.imread('../images/num.png')# 拷贝
img = num.copy()# 灰度化
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# 二值化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)# 轮廓检测
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)# 绘制轮廓
cv.drawContours(img, contours, -1, (0, 255, 0), 2)# 获取外接矩形
for cnt in contours:x, y, w, h = cv.boundingRect(cnt)# 绘制外接矩形cv.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2)# 绘制图像
cv.imshow('img', img)
cv.imshow('binary', binary)cv.waitKey(0)
cv.destroyAllWindows()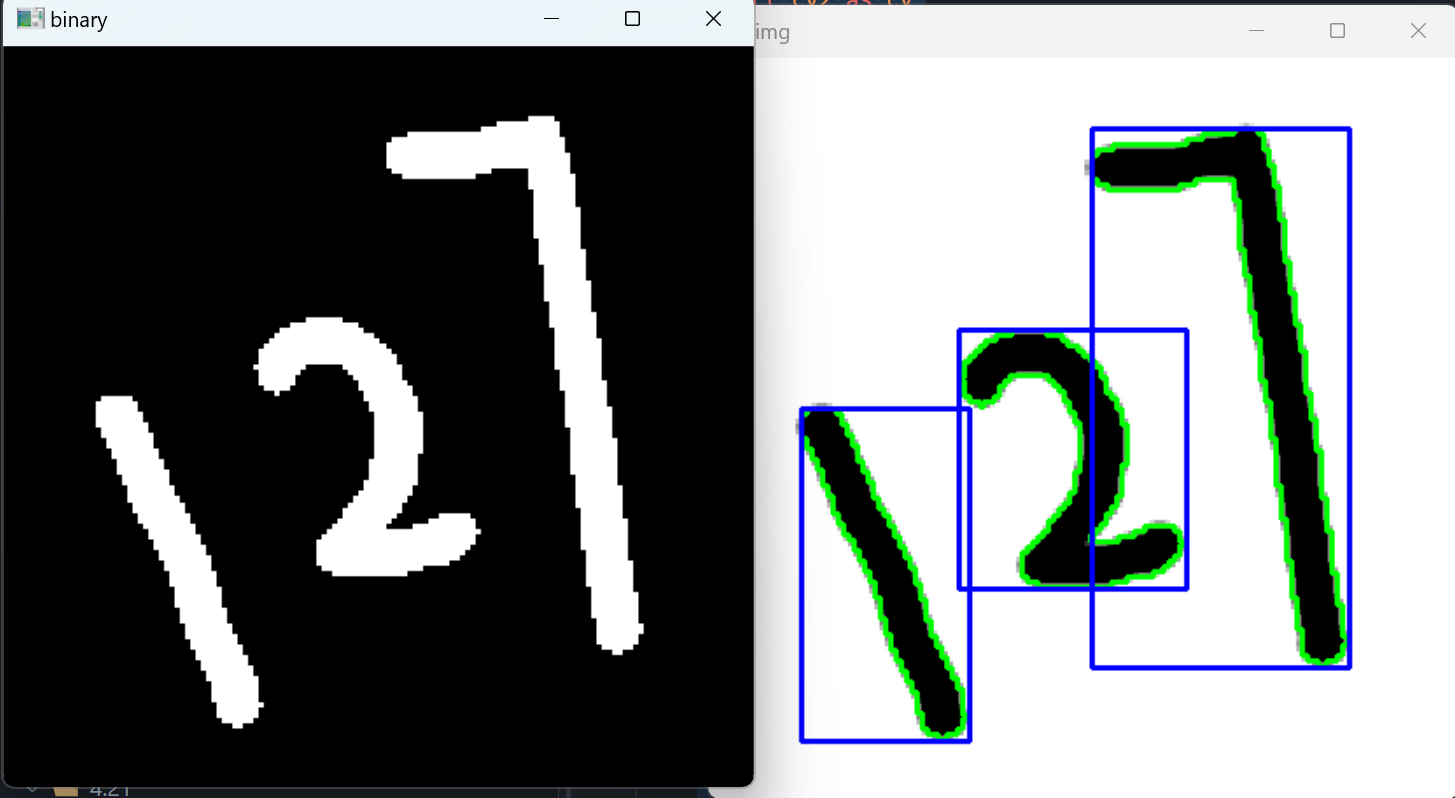
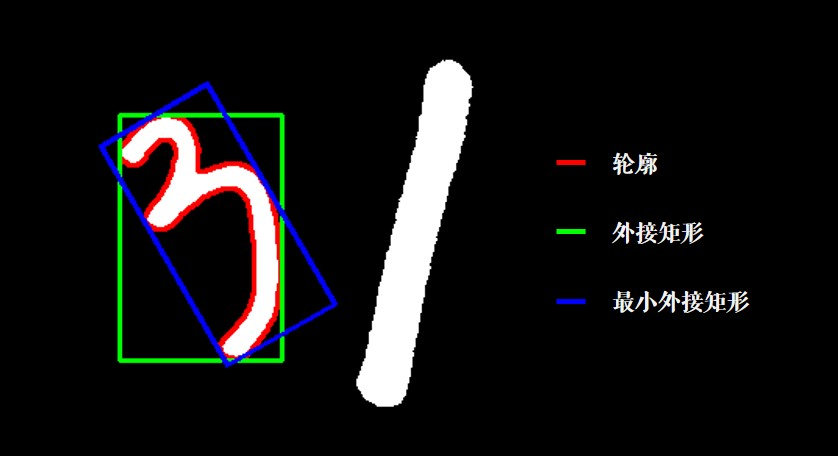
二.最小外接矩形
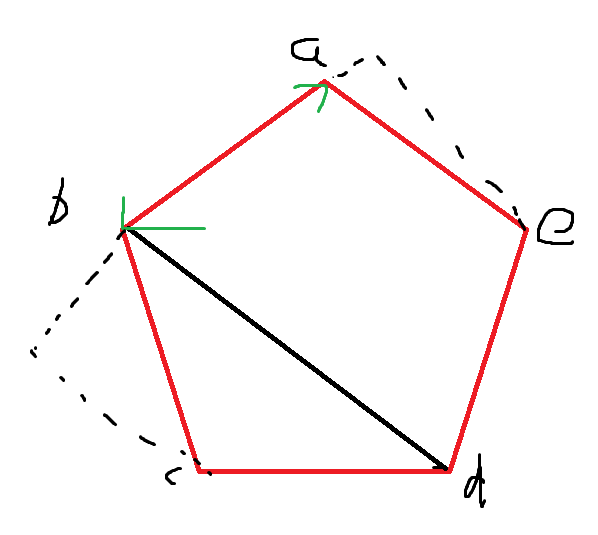
寻找最小外接矩形使用的算法叫做旋转卡壳法,其就是基于凸包点进行的。
而对于凸包多边形的一个最小外接矩形,应存在一条边与原凸包多边形的边共线。
如图,这是一个凸包点的图像,找一条边ab,然后找到离这条边最远的点d,画一条线。然后分别找在向量ab与ba上投影最长的点,找到后平移之前画的直线与投影最长的点重合即可。
rect = cv2.minAreaRect(cnt)
传入的cnt参数为contours中的轮廓也可以是凸包点(不过内部已经自动处理得到凸包了)
- 计算轮廓最小面积外接矩形:
- rect 结构通常返回中心点坐标 (x, y)、宽度 width、高度 height 和旋转角度 angle
cv2.boxPoints(rect).astype(int)
- 返回一个形状为 4行2列的数组,每一行代表一个点的坐标(x, y),顺序按照逆时针或顺时针方向排列
- 而这些坐标一般会是浮点数,需要转换为整数坐标
import cv2 as cvnum = cv.imread('../images/num.png')img = num.copy()# 灰度化
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# 二值化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)# 轮廓检测
contours, hierarchy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)# 绘制轮廓
cv.drawContours(img, contours, -1, (0, 255, 0), 2)# 获取最小外接矩形坐标
for cnt in contours:# 筛选面积最小的矩形rect = cv.minAreaRect(cnt)# 计算最小矩形的四个顶点坐标box = cv.boxPoints(rect).astype(int)# 绘图cv.drawContours(img, [box], 0, (0, 0, 255), 2)cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()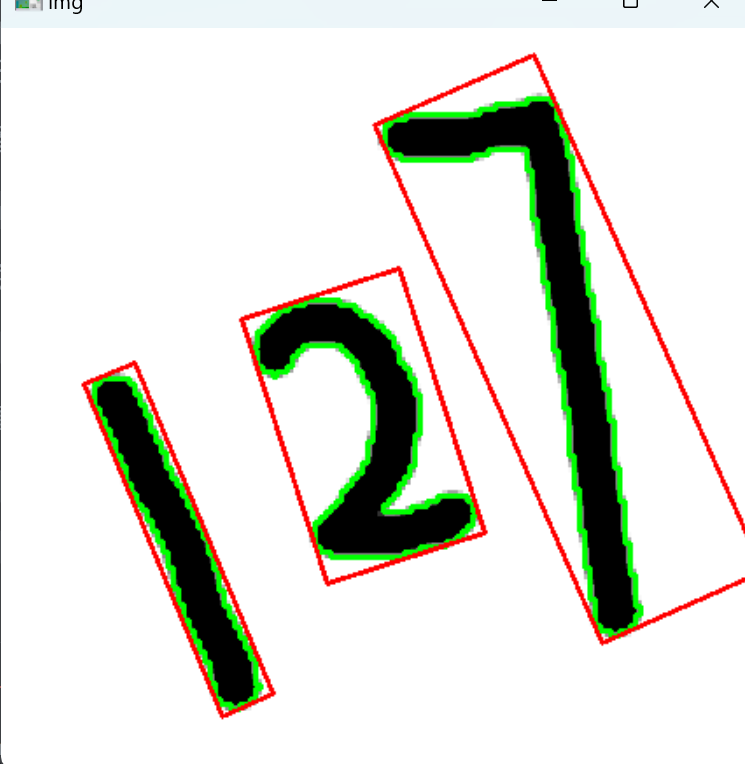
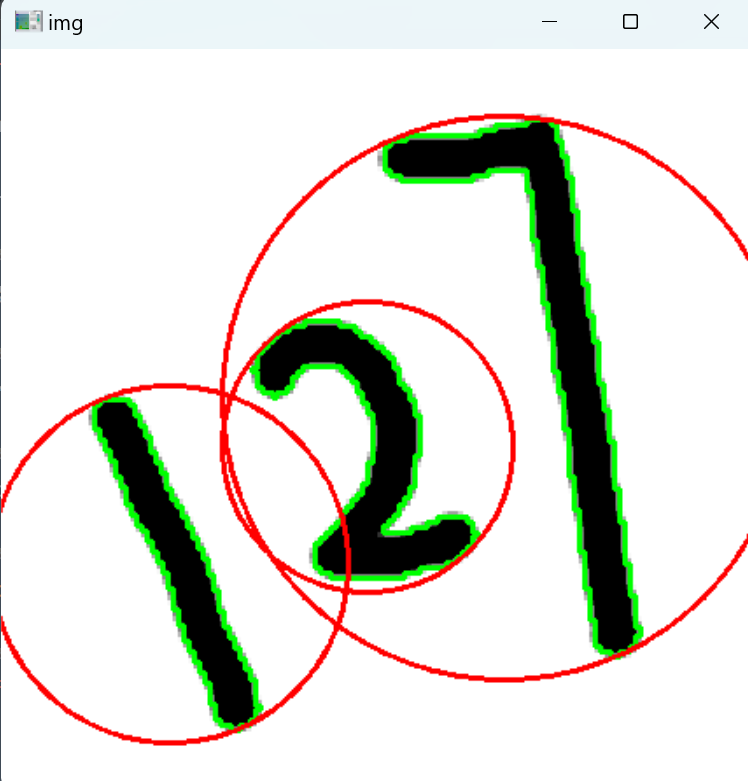
三.最小外接圆
使用的算法是Welzl算法。Welzl算法基于一个定理:希尔伯特圆定理,对于平面上的任意三个不在同一直线上的点,存在一个唯一的圆同时通过这三个点,且该圆是最小面积的圆
获取参数的函数:
cv2.minEnclosingCircle(points)
参数说明:
- points:输入参数图片轮廓数据
返回值:
- center:一个包含圆心坐标的二元组 (x, y)。
- radius:浮点数类型,表示计算得到的最小覆盖圆的半径。
import cv2 as cvnum = cv.imread('../images/num.png')img = num.copy()# 灰度化
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# 二值化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)# 轮廓检测
contours, hierarchy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)# 绘制轮廓
cv.drawContours(img, contours, -1, (0, 255, 0), 2)# 获取最小外接圆
for cnt in contours:(x, y), radius = cv.minEnclosingCircle(cnt)center = (int(x), int(y))radius = int(radius)cv.circle(img, center, radius, (0, 0, 255), 2)cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()