从单模态到多模态:深度生成模型的演进历程
在人工智能领域,生成模型的发展一直是研究热点。从最早的自编码器到如今的多模态扩散模型,这一技术路线不断突破,为创意内容生成、数据增强和表示学习等领域带来革命性变化。本文将详细介绍几种关键生成模型的技术原理和演进路径,展示从单模态到多模态的技术发展历程。
生成模型简介
1. GAN(生成对抗网络,2014年6月)
背景
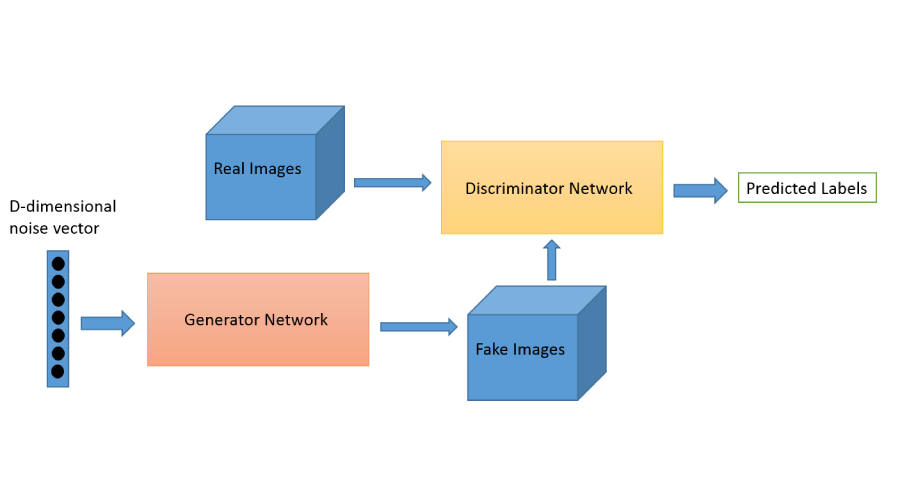
由Ian Goodfellow等人提出,旨在通过对抗训练生成逼真数据。其核心思想是通过生成器与判别器的博弈,使生成器逐渐逼近真实数据分布。
原理
- 生成器(Generator):将随机噪声 z z z映射到数据空间,生成样本 G ( z ) G(z) G(z)。
- 判别器(Discriminator):判断输入样本是否来自真实数据分布,输出概率 D ( x ) D(x) D(x)。
- 对抗目标:生成器最大化判别器的判断错误,判别器最小化分类误差:
min G max D E x ∼ p d a t a ( x ) [ log D ( x ) ] + E z ∼ p z ( z ) [ log ( 1 − D ( G ( z ) ) ) ] \min_G \max_D \mathbb{E}_{x\sim p_{data}(x)}[\log D(x)] + \mathbb{E}_{z\sim p_z(z)}[\log(1 - D(G(z)))] GminDmaxEx∼pdata(x)[logD(x)]+Ez∼pz(z)[log(1−D(G(z)))]
网络结构
- 生成器:多层全连接或卷积网络,输出与真实数据相同维度的样本。
- 判别器:类似分类器,通常为全连接或卷积网络,输出二分类概率。
优缺点
- 优点:
- 生成样本质量高,支持多样化生成(如高分辨率图像)。
- 支持条件生成(如CGAN)。
- 缺点:
- 训练不稳定(模式崩溃、梯度消失)。
- 难以评估收敛性,需平衡生成器与判别器的训练速度。
应用场景
- 图像生成(如DeepFakes)、风格迁移(如CycleGAN)、超分辨率重建。
2. AE(自编码器,1986年)
背景
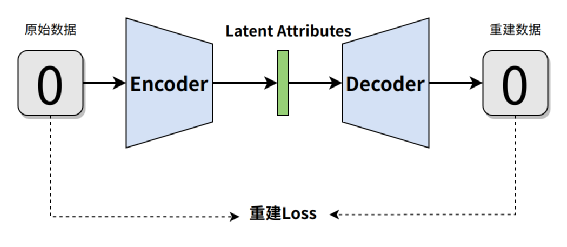
经典无监督学习模型,由编码器和解码器组成,目标是学习数据的紧凑表示并重构原始数据。
原理
- 编码器:将输入 x x x压缩为低维潜在向量 z = E ( x ) z = E(x) z=E(x)。
- 解码器:从 z z z重构 x ′ x' x′,最小化重构误差:
L = ∣ ∣ x − D ( E ( x ) ) ∣ ∣ 2 \mathcal{L} = ||x - D(E(x))||^2 L=∣∣x−D(E(x))∣∣2
网络结构
- 编码器:全连接或卷积层,逐步降低维度。
- 解码器:反卷积或全连接层,恢复原始数据维度。
优缺点
- 优点:
- 简单高效,适合降维和去噪。
- 可用于特征提取(如图像压缩)。
- 缺点:
- 潜在空间无明确结构,生成样本模糊。
- 不支持直接采样生成新样本。
应用场景
- 数据压缩(如图像压缩)、特征提取、去噪(如图像修复)。
3. VAE(变分自编码器,2013年12月)
背景
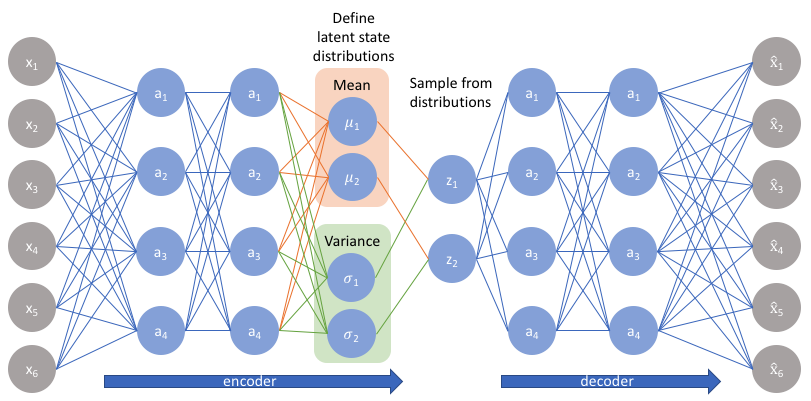
基于贝叶斯概率框架,通过变分推断学习潜在变量分布,解决AE的潜在空间不连续问题。
原理
- 编码器:输出潜在变量分布参数 μ , σ \mu, \sigma μ,σ,即 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x)。
- 解码器:从 z ∼ N ( μ , σ 2 ) z \sim \mathcal{N}(\mu, \sigma^2) z∼N(μ,σ2)生成样本。
- 损失函数:重构损失(Reconstruction Loss) + KL散度(正则化):
L = E q ϕ ( z ∣ x ) [ log p θ ( x ∣ z ) ] − KL ( q ϕ ( z ∣ x ) ∣ ∣ p ( z ) ) \mathcal{L} = \mathbb{E}_{q_\phi(z|x)}[\log p_\theta(x|z)] - \text{KL}(q_\phi(z|x) || p(z)) L=Eqϕ(z∣x)[logpθ(x∣z)]−KL(qϕ(z∣x)∣∣p(z))
网络结构
- 编码器:输出均值和方差的两个向量。
- 重参数化技巧: z = μ + ϵ ⋅ σ z = \mu + \epsilon \cdot \sigma z=μ+ϵ⋅σ, ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, I) ϵ∼N(0,I)。
优缺点
- 优点:
- 潜在空间连续且结构化,支持插值和采样。
- 可解释性强,适合生成多样化样本。
- 缺点:
- 生成样本模糊(KL散度惩罚过强)。
- 重构质量可能下降(如图像边缘模糊)。
应用场景
- 图像生成、语义嵌入、数据增强(如生成相似但不同的样本)。
4. VQ-VAE(矢量量化变分自编码器,2017年12月)
背景
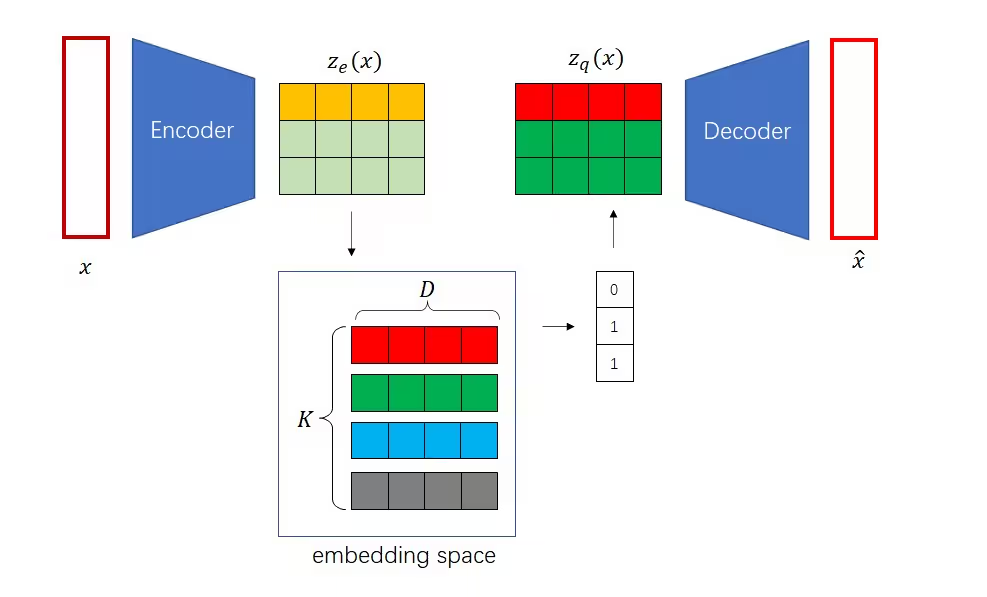
为解决VAE生成模糊问题,引入离散潜在空间,结合自编码器与矢量量化技术。
原理
- 编码器:输出连续潜在向量。
- 矢量量化层:将连续向量映射到最近邻离散码本向量 e k e_k ek。
- 解码器:从离散向量重构数据。
- 损失函数:重构损失 + 矢量量化误差(编码器与码本的差异)。
网络结构
- 码本:预先定义的离散向量集合。
- 离散化步骤: z q = arg min e k ∣ ∣ z e − e k ∣ ∣ 2 z_q = \arg\min_{e_k} ||z_e - e_k||^2 zq=argminek∣∣ze−ek∣∣2。
优缺点
- 优点:
- 生成样本清晰,避免后验坍塌。
- 离散空间支持高效检索(如文本生成)。
- 缺点:
- 离散化可能降低潜在空间的连续性。
- 训练复杂度增加(需优化码本)。
应用场景
- 图像生成(如DALL·E)、音频合成(如语音编码)、文本生成(如离散化语言模型)。
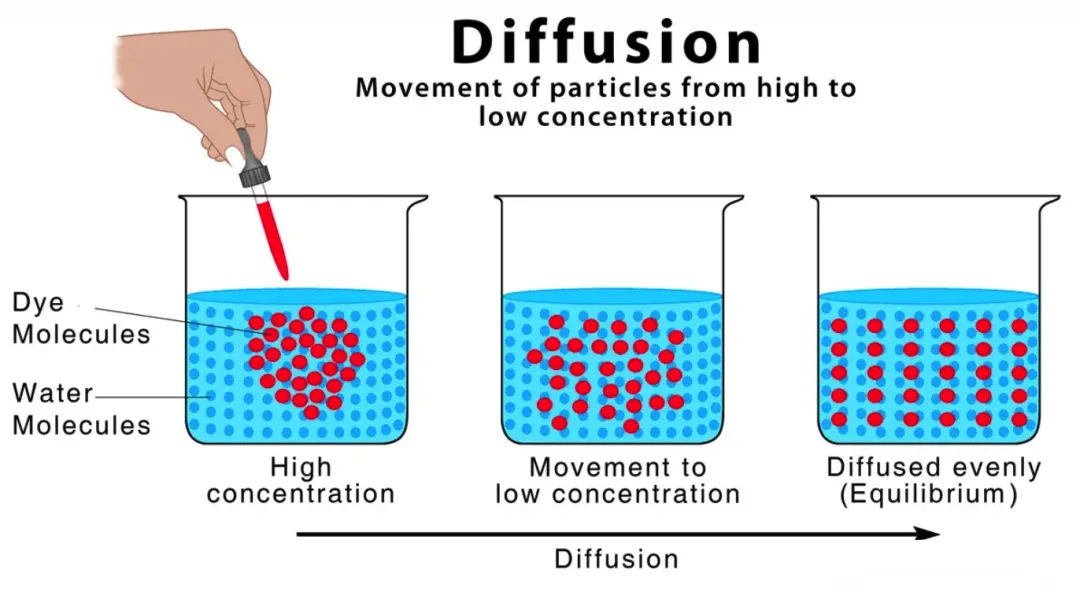
5. Diffusion Model(扩散模型,2015年3月)

背景
受物理扩散过程启发,通过逐步添加噪声再逆向去噪生成数据。
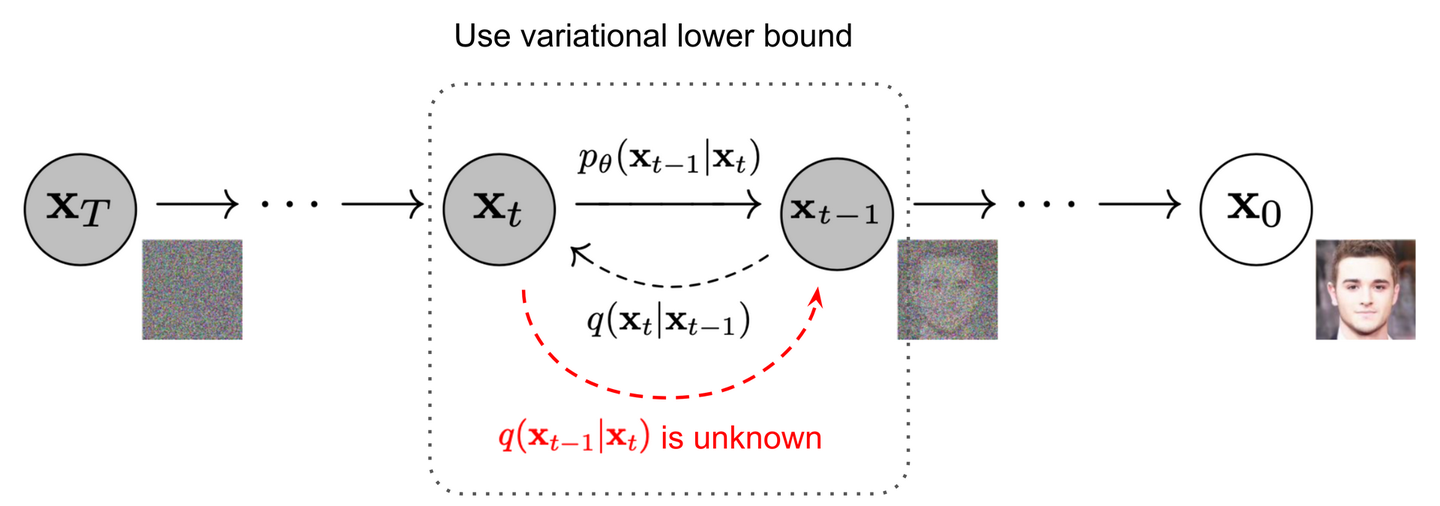
原理
- 正向扩散过程:
x t = 1 − β t x t − 1 + β t ϵ t − 1 , ϵ t − 1 ∼ N ( 0 , I ) x_t = \sqrt{1-\beta_t}x_{t-1} + \sqrt{\beta_t}\epsilon_{t-1}, \quad \epsilon_{t-1} \sim \mathcal{N}(0,I) xt=1−βtxt−1+βtϵt−1,ϵt−1∼N(0,I)
其中, β t \beta_t βt为噪声调度参数,逐步将数据 x 0 x_0 x0变为噪声 x T x_T xT。 - 逆向生成过程:
学习模型 p θ ( x t − 1 ∣ x t ) p_\theta(x_{t-1}|x_t) pθ(xt−1∣xt)从噪声恢复数据。
数学基础
- 正向过程:马尔可夫链,每一步添加高斯噪声。
- 逆向过程:通过深度网络预测噪声 ϵ t \epsilon_t ϵt,逐步去噪:
x t − 1 = 1 α t ( x t − 1 − α t ϵ θ ( x t , t ) ) x_{t-1} = \frac{1}{\sqrt{\alpha_t}}\left(x_t - \sqrt{1-\alpha_t}\epsilon_\theta(x_t,t)\right) xt−1=αt1(xt−1−αtϵθ(xt,t))
其中, α t = 1 − β t \alpha_t = 1-\beta_t αt=1−βt。
网络结构
- 去噪网络:通常为U-Net,预测当前步的噪声 ϵ t \epsilon_t ϵt。
- 时间嵌入:扩散步数 t t t作为输入,指导去噪。
优缺点
- 优点:
- 生成质量高,支持条件生成(如文本到图像)。
- 理论基础扎实,避免模式崩溃。
- 缺点:
- 训练与推理速度慢(需多步迭代,如1000步)。
- 计算资源需求高(内存和显存占用大)。
应用场景
- 高分辨率图像生成(如Stable Diffusion)、超分辨率、图像修复。
6. DDPM(去噪扩散概率模型,2020年6月)
背景
Diffusion Model的里程碑实现,通过马尔可夫链和噪声调度参数优化训练。
原理
- 噪声预测:模型直接预测添加的噪声 ϵ t \epsilon_t ϵt:
ϵ θ ( x t , t ) ≈ ϵ \epsilon_\theta(x_t, t) \approx \epsilon ϵθ(xt,t)≈ϵ - 去噪公式:
x t − 1 = 1 α t ( x t − 1 − α t ϵ θ ( x t , t ) ) x_{t-1} = \frac{1}{\sqrt{\alpha_t}}\left(x_t - \sqrt{1-\alpha_t}\epsilon_\theta(x_t,t)\right) xt−1=αt1(xt−1−αtϵθ(xt,t))
网络结构
- U-Net:编码器-解码器结构,处理多尺度特征。
- 时间嵌入:扩散步数 t t t经正弦嵌入后输入网络。
优缺点
- 优点:
- 理论严谨,支持灵活调度噪声参数。
- 生成质量接近真实数据分布。
- 缺点:
- 采样步骤多(通常需1000步),计算成本高。
- 需要大量训练数据。
应用场景
- 图像生成(如DDPM的变体)、文本到图像(如DALLE-2)、视频生成。
7. Diffusion Models Beat GANs(2021年5月)
背景
通过改进扩散模型架构(如引入注意力机制),在ImageNet等数据集上超越GAN的生成质量与多样性。
关键改进
- 层次化扩散过程:分阶段处理不同尺度特征。
- 条件生成:结合文本或标签条件,增强可控性。
- 注意力机制:增强跨区域特征关联(如Transformer模块)。
原理
- 多尺度扩散:在不同分辨率下执行扩散过程,提升细节质量。
- 混合模型:结合扩散模型与GAN的判别器进行联合训练。
优缺点
- 优点:
- 生成多样性与保真度并存,无模式崩溃。
- 支持复杂条件生成(如文本描述生成图像)。
- 缺点:
- 计算资源需求高,训练复杂度大。
- 需要大量标注数据。
应用场景
- 高质量图像生成、风格迁移、艺术创作。
8. DALLE-2(2022年4月)
背景
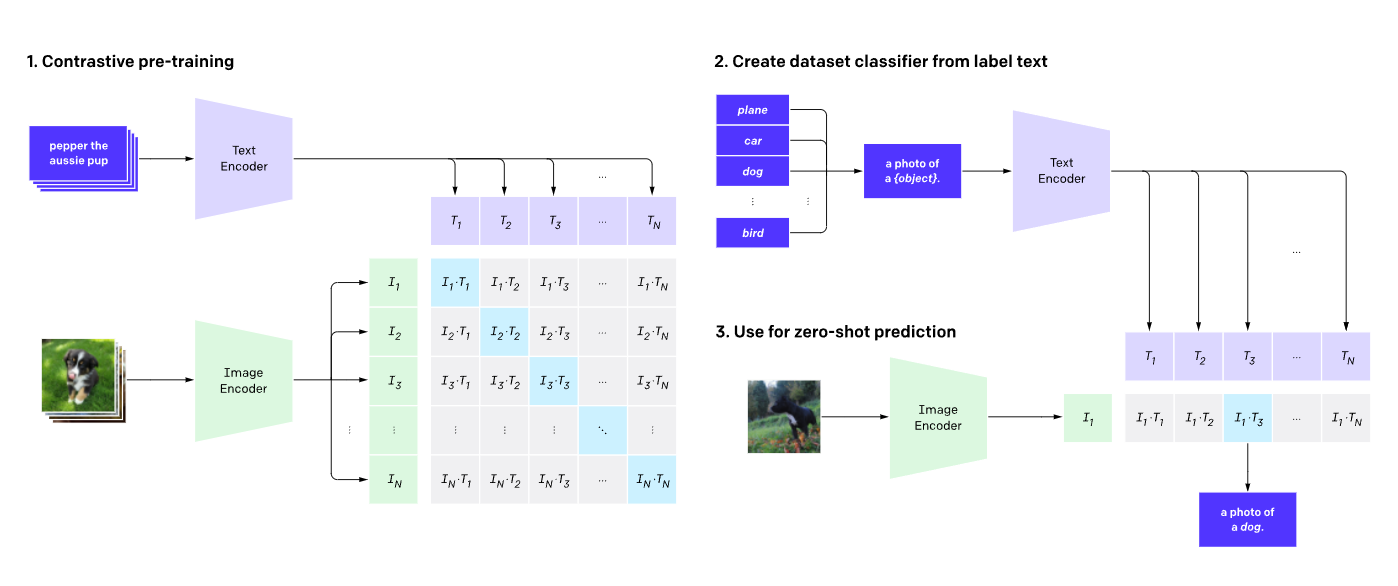
结合文本到图像生成与扩散模型,通过CLIP对齐文本与视觉特征。
原理
- 文本编码器:将文本映射为CLIP的嵌入向量。
- 扩散解码器:在潜在空间(如VQ-VAE的码本)中执行扩散,逐步去噪生成图像。
网络结构
- 文本编码器:基于Transformer的编码器,输出文本嵌入。
- 扩散模型:在潜在空间中执行,使用U-Net预测噪声。
- CLIP对齐:通过对比学习对齐文本和图像的嵌入空间。
优缺点
- 优点:
- 文本-图像对齐度高,支持复杂描述(如“一只戴帽子的熊猫在跳舞”)。
- 生成多样性与质量平衡。
- 缺点:
- 依赖预训练CLIP模型,计算成本高。
- 需要大量文本-图像配对数据。
应用场景
- 文本生成图像(如MidJourney)、艺术创作、内容生成(如广告设计)。
9. Latent Diffusion Model(潜在扩散模型,2022年7月)
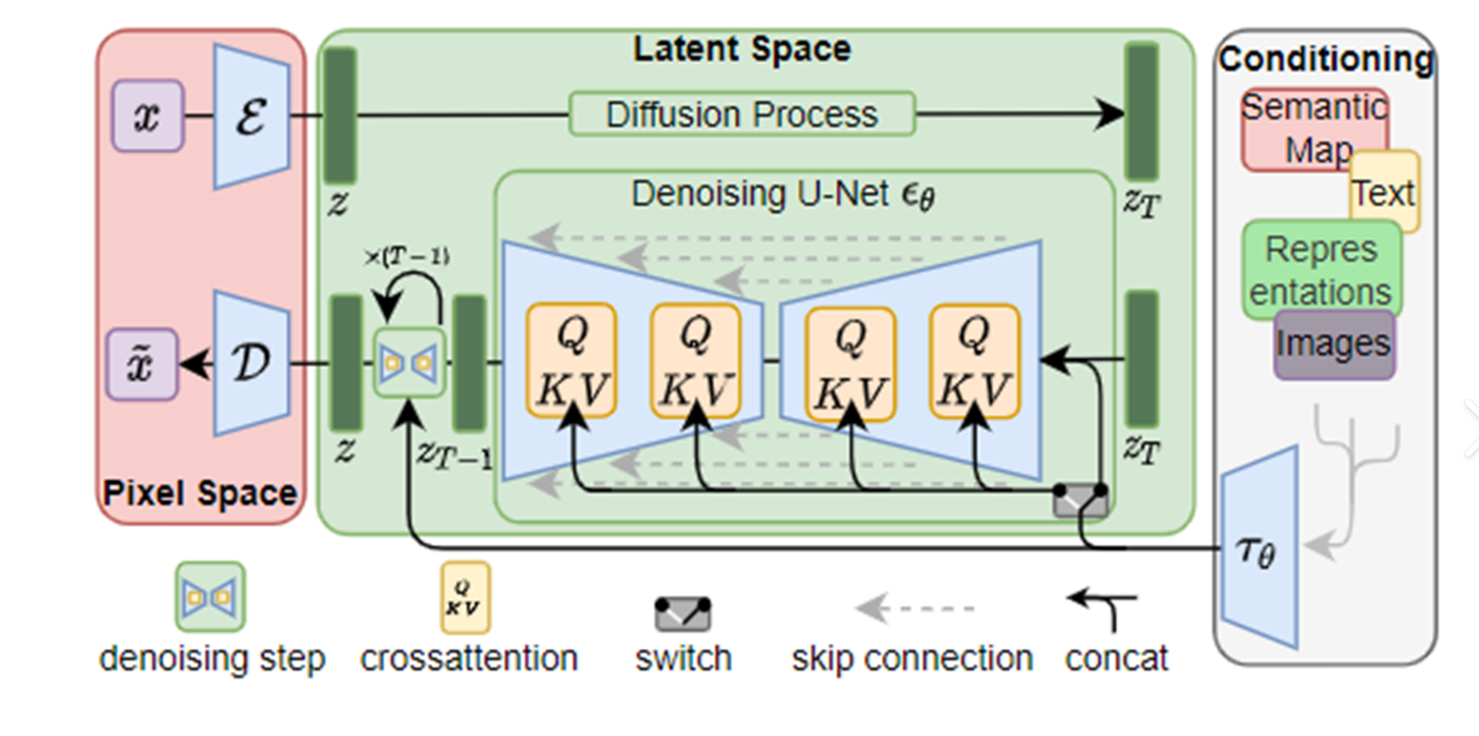
背景
在潜在空间(如VQ-VAE的离散码本)中执行扩散过程,大幅减少计算量。
原理
- 潜在空间扩散:在低维潜在空间(如 z ∈ R d z \in \mathbb{R}^d z∈Rd)中进行扩散,而非像素空间。
- 解码器:将潜在空间的生成结果映射回像素空间。
网络结构
- 编码器-解码器:如VQ-VAE或AutoEncoder,将图像压缩到潜在空间。
- 扩散过程:在潜在空间中执行,使用U-Net预测噪声。
优缺点
- 优点:
- 推理速度加快(维度降低,如从 256 × 256 256 \times 256 256×256像素到 32 × 32 32 \times 32 32×32潜在码本)。
- 生成质量与原始模型相当。
- 缺点:
- 依赖潜在空间编码器的质量。
- 需要额外训练编码器-解码器。
应用场景
- 高效图像生成(如Stable Diffusion)、编辑工具(如图像修复)。
10. UNet(2015年)
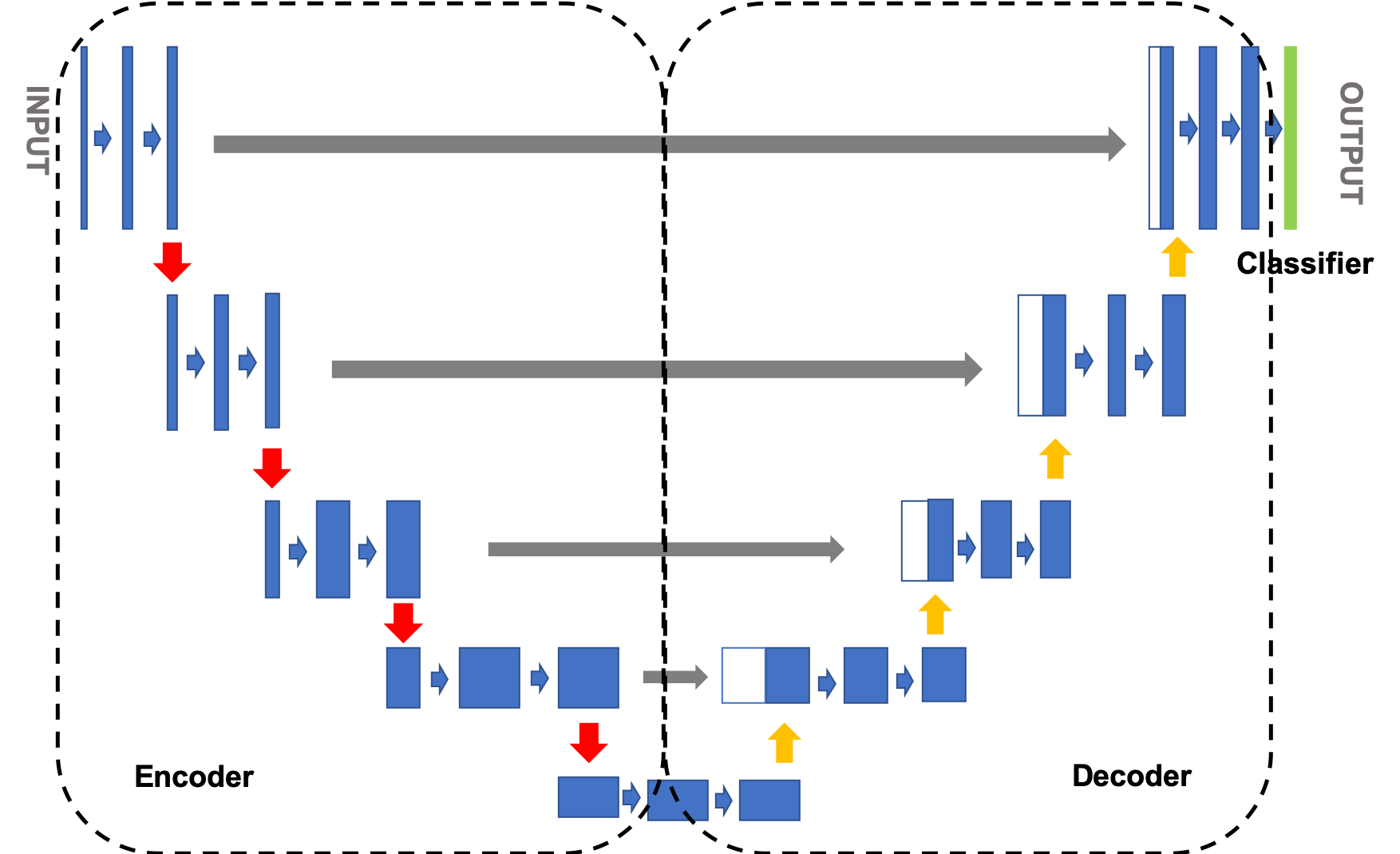
背景
由Olaf Ronneberger提出,最初用于医学图像分割,现广泛用于扩散模型的去噪网络。
原理
- 编码器(收缩路径):卷积层提取特征,池化降低分辨率。
- 解码器(扩张路径):反卷积恢复分辨率,跳跃连接融合多尺度特征。
网络结构
- 跳跃连接:编码器层与解码器对应层的特征拼接。
- 时间嵌入:扩散模型中需输入当前步数 t t t,通过正弦嵌入扩展维度。
- 注意力机制:部分改进版UNet(如U-Net++)引入注意力模块。
优缺点
- 优点:
- 多尺度特征融合,适配复杂任务(如医学图像的细节重建)。
- 模块化设计,易于扩展。
- 缺点:
- 参数量较大,计算成本高。
- 需要大量标注数据训练。
应用场景
- 医学图像分割(如肿瘤检测)、扩散模型去噪(如DDPM、Stable Diffusion)、语义分割。
11. DDIM(去噪扩散隐式模型,2020年10月)
背景
由Jonathan Ho等人提出的扩散模型改进版本,通过设计非马尔可夫链加速采样过程,显著提高扩散模型的推理效率。
原理
- 隐式采样:打破马尔可夫链约束,允许直接从 x t x_t xt到 x t − s x_{t-s} xt−s的跳跃:
x t − s = α t − s ( x t − 1 − α t ϵ θ ( x t , t ) α t ) + 1 − α t − s ϵ θ ( x t , t ) x_{t-s} = \sqrt{\alpha_{t-s}}\left(\frac{x_t - \sqrt{1-\alpha_t}\epsilon_\theta(x_t,t)}{\sqrt{\alpha_t}}\right) + \sqrt{1-\alpha_{t-s}}\epsilon_\theta(x_t,t) xt−s=αt−s(αtxt−1−αtϵθ(xt,t))+1−αt−sϵθ(xt,t) - 确定性推理:可选择确定性路径(无随机性),实现可控生成:
x t − 1 = α t − 1 ( x t − 1 − α t ϵ θ ( x t , t ) α t ) + 1 − α t − 1 ϵ θ ( x t , t ) x_{t-1} = \sqrt{\alpha_{t-1}}\left(\frac{x_t - \sqrt{1-\alpha_t}\epsilon_\theta(x_t,t)}{\sqrt{\alpha_t}}\right) + \sqrt{1-\alpha_{t-1}}\epsilon_\theta(x_t,t) xt−1=αt−1(αtxt−1−αtϵθ(xt,t))+1−αt−1ϵθ(xt,t)
网络结构
- 与DDPM相同,使用U-Net预测噪声。
- 通过调度采样步数,如从1000步减少到10-50步。
优缺点
- 优点:
- 大幅提高采样速度(可达10-100倍)。
- 支持确定性采样,便于插值和编辑。
- 缺点:
- 质量略低于完整步数的DDPM。
- 参数调整复杂,需平衡速度与质量。
应用场景
- 实时图像生成、交互式编辑工具、快速原型设计。
12. Transformer-based Generative Models(基于Transformer的生成模型,2021年后)
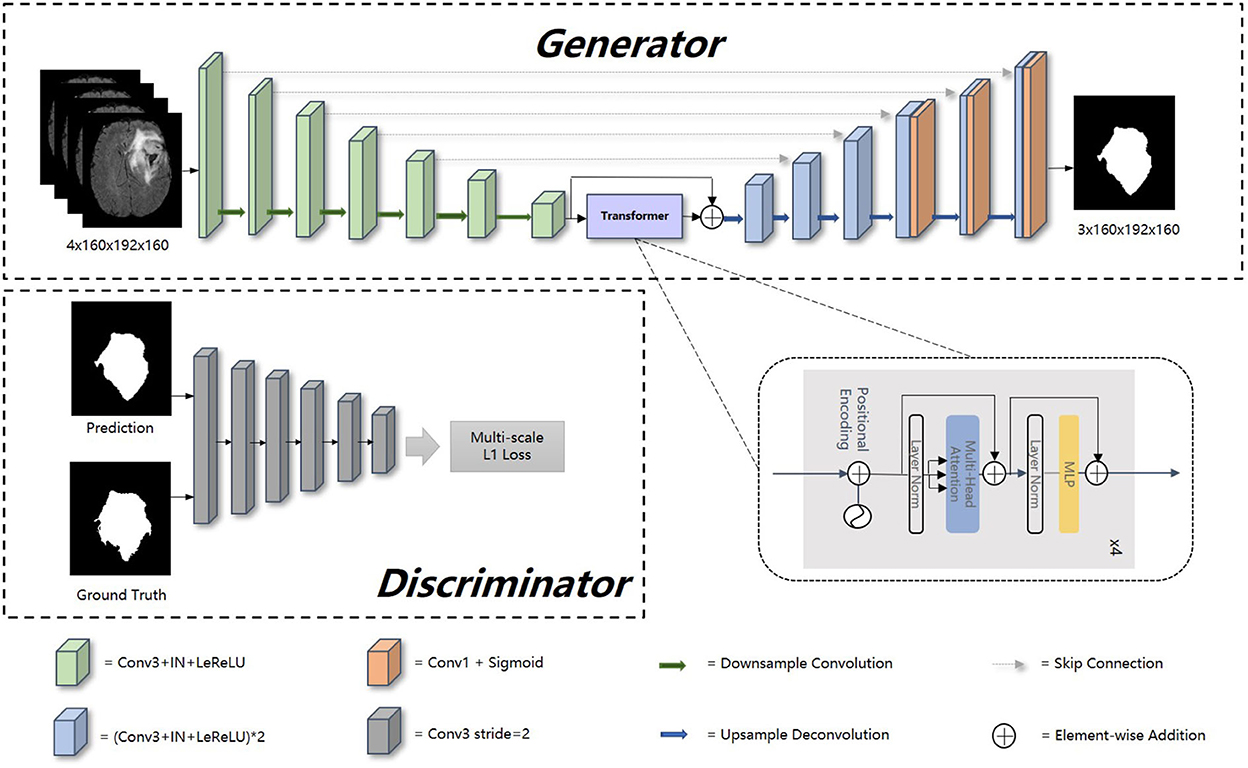
背景
将Transformer架构应用于生成模型,如VQGAN+CLIP、Imagen等,结合自注意力机制的长距离依赖建模优势。
原理
- 自回归生成:类似GPT模型,逐元素生成序列。
- 扩散Transformer:将扩散模型的U-Net替换为Transformer架构。
- 双向注意力:通过交叉注意力机制融合文本与图像特征。
网络结构
- Vision Transformer (ViT):将图像分割为patch处理。
- 交叉注意力层:融合文本特征指导图像生成。
- 位置编码:维持序列的空间信息。
优缺点
- 优点:
- 长距离依赖建模能力强,适合复杂场景。
- 与大语言模型架构一致,便于多模态融合。
- 缺点:
- 计算复杂度高,尤其是自注意力机制( O ( n 2 ) O(n^2) O(n2))。
- 需要大量训练数据和计算资源。
应用场景
- 高质量图像生成(如Parti、Imagen)、视频生成(如Make-A-Video)、多模态生成。
13. ControlNet(2023年2月)
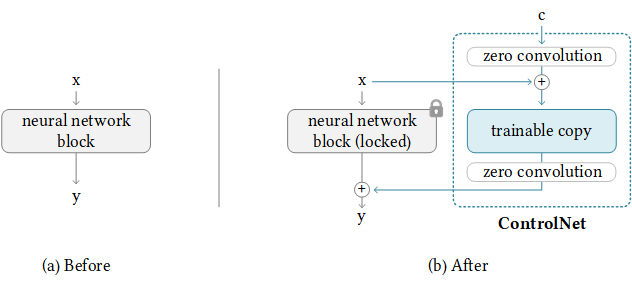
背景
由Lvmin Zhang等人提出的条件控制框架,为扩散模型增加精确的空间控制能力,实现结构化生成。
原理
- 零卷积:使用参数初始化为零的卷积层,逐步学习条件控制信号。
- 条件分支:额外的神经网络分支处理控制信号(如边缘、姿势等)。
- 特征融合:在U-Net的各层级融合条件特征。
网络结构
- 主干网络:预训练的稳定扩散模型(freeze)。
- 控制分支:与主干网络相同结构,但专注于条件信号处理。
- 特征适配器:将条件特征映射到主干网络相容的空间。
优缺点
- 优点:
- 精确的空间控制,支持多种条件(线稿、姿势、深度等)。
- 保留原始模型生成能力,仅增强控制层面。
- 缺点:
- 需要特定条件数据训练。
- 额外内存占用,增加计算负担。
应用场景
- 精确图像编辑(如姿势引导)、草图转图像、风格迁移与保持结构。
总结对比表
| 模型 | 核心思想 | 优势与局限 | 典型应用 |
|---|---|---|---|
| GAN | 对抗训练 | 高质量生成,但训练不稳定 | 图像生成、风格迁移 |
| AE/VAE/VQ-VAE | 潜在空间建模 | 结构化表示,但生成模糊 | 数据压缩、图像修复 |
| Diffusion Model | 逐步去噪生成 | 高保真,但速度慢 | 文本到图像、超分辨率 |
| DALLE-2 | 文本-图像对齐 | 复杂描述生成,依赖CLIP | 文本生成图像 |
| Latent Diffusion | 潜在空间加速 | 高效生成,依赖编码器质量 | 快速图像生成工具 |
| UNet | 多尺度特征融合 | 细节保留,计算成本高 | 医学分割、扩散模型核心 |
| DDIM | 非马尔可夫链加速 | 采样快,但质量略低 | 实时生成、快速原型设计 |
| Transformer | 自注意力机制 | 多模态建模强,但计算复杂 | 高质量图像生成、视频生成 |
| ControlNet | 条件控制 | 精确控制,但需要额外资源 | 姿势引导、草图转图像 |
未来方向
- 效率优化:如隐式扩散模型(DDIM)加速采样,或结合神经渲染技术。
- 多模态融合:结合文本、音频等生成复杂内容(如DALLE-2的扩展)。
- 可控生成:通过条件输入(如文本、属性)精细控制生成结果。