【新能源科学与技术】MATALB/Simulink小白教程(一)实验文档【新能源电力转换与控制仿真】
DP读书:新能源科学与工程——专业课「新能源发电系统」
- 2025a 版本 MATLAB
- 下面进入正题
- 仿真一:Buck 电路
- 一、仿真目的
- 二、仿真内容
- (一)Buck电路基本构成及工作原理
- (二)Buck电路仿真模型及元件连接
- (三)Buck电路关键模块参数设置
- (四)运行仿真与结果分析
- (五)故障诊断与排除
- 仿真二:逆变电路与 SPWM 控制技术仿真
- 一、仿真目的
- 二、仿真内容
- (一)单相逆变电路仿真
- (二)三相逆变电路仿真
- 仿真三:PI 控制在 DC/DC 变换电路及 DC/AC 变换电路中的应用
- 一、仿真目的
- 二、仿真内容
- (一)PI 控制在 DC/DC 变换电路中应用
- (二)PI 控制在单相 DC/AC 变换电路中应用
- 仿真四:光伏发电系统中最大功率点跟踪技术仿真
- 一、仿真目的
- 二、仿真内容
- (一)扰动观察法最大功率点跟踪技术
- (二)电导增量法最大功率点跟踪技术
很久没有发博客了,停更也快接近大半年,时间更多花在了PPT和项目上,最近找了不少朋友一起做 开源人形机器人,于是 索性在课程作业和项目之余更新下我的课程笔记—— MATLAB从0基础到 新能源发电系统仿真,感谢陈磊教授,下面的笔记在他的课上我逐渐学会如何使用MATLAB和Simulink。
P.S.:new_energy_coder_club也在今天迎来了第40位贡献者
Gitee排名—前沿技术-机器人 No.24 (欢迎各位大佬给个Star🌟)
2025a 版本 MATLAB
在这之前看过各种MATLAB的书本只是觉得,《***快速教学》《***3小时看完》…用处不大,十多行语法对不起近百的价格(甚至还不如阿坤的MATLAB配色教程),在踩了一大堆坑之后,我终于意识到 一个好的课或者教程需要什么…
下面进入正题
三篇关于新能源电力转换与控制仿真的实验指导文档
仿真一:Buck 电路
一、仿真目的
- 深入理解Buck电路的工作原理
- 掌握Buck电路的建模与仿真方法
- 学会分析Buck电路的性能特性
二、仿真内容
(一)Buck电路基本构成及工作原理
- 基本构成:Buck电路由直流电压源、MOSFET管、二极管、电感电容滤波电路等组成。其中,MOSFET管和二极管构成开关电路,控制电能的传输;电感电容滤波电路用于平滑输出电压和电流。
- 工作原理:Buck电路是一种降压型直流-直流变换器。当MOSFET管导通时,输入电压通过电感为负载和电容供电;当MOSFET管截止时,电感储存的能量通过二极管释放给负载和电容。通过调节MOSFET管的占空比,可以控制输出电压的大小。
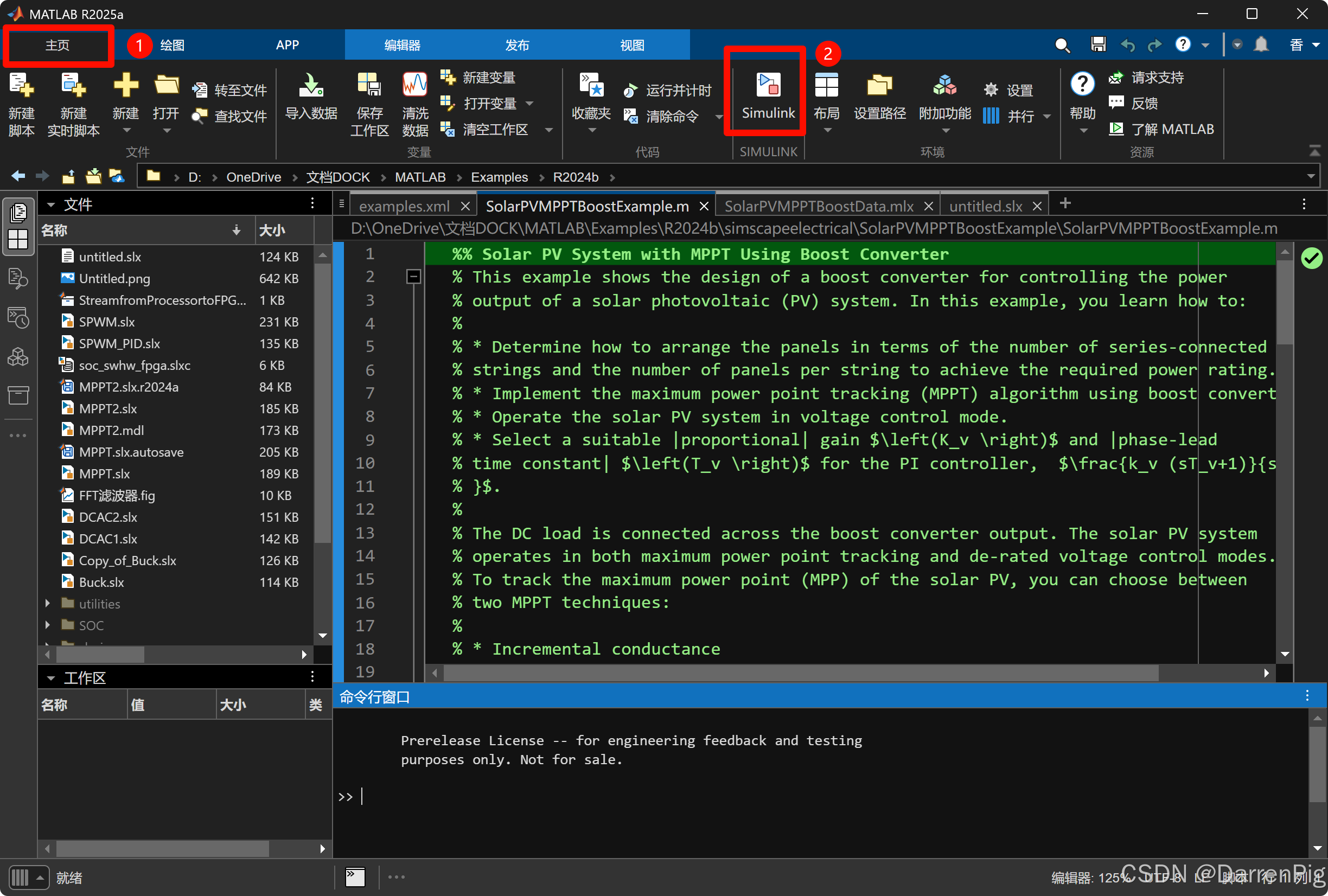
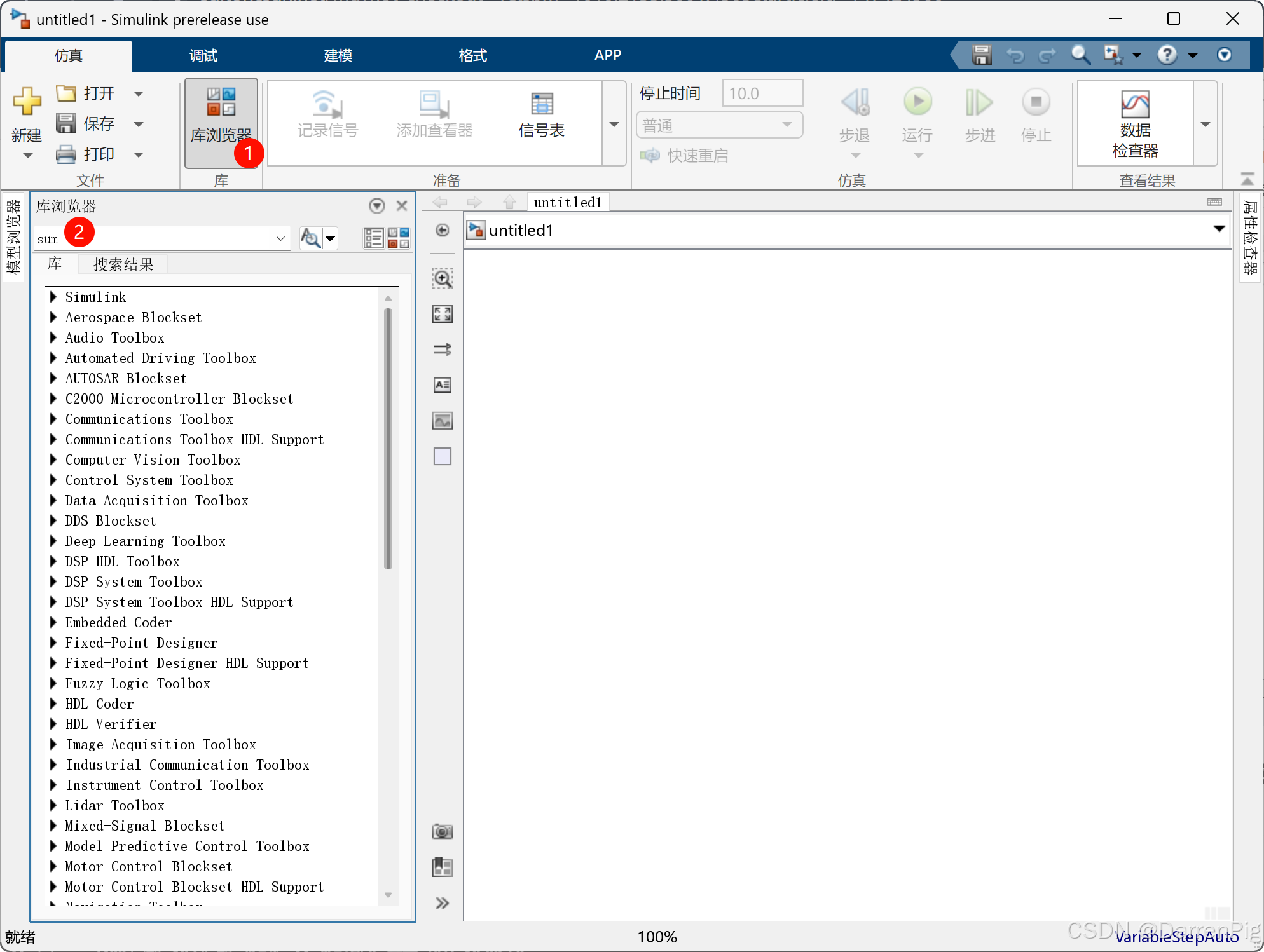
然后打开MATLAB2025,建议淘宝买个密钥或者账号,可玩性高
第一次打开会慢一点,左下角显示如下:
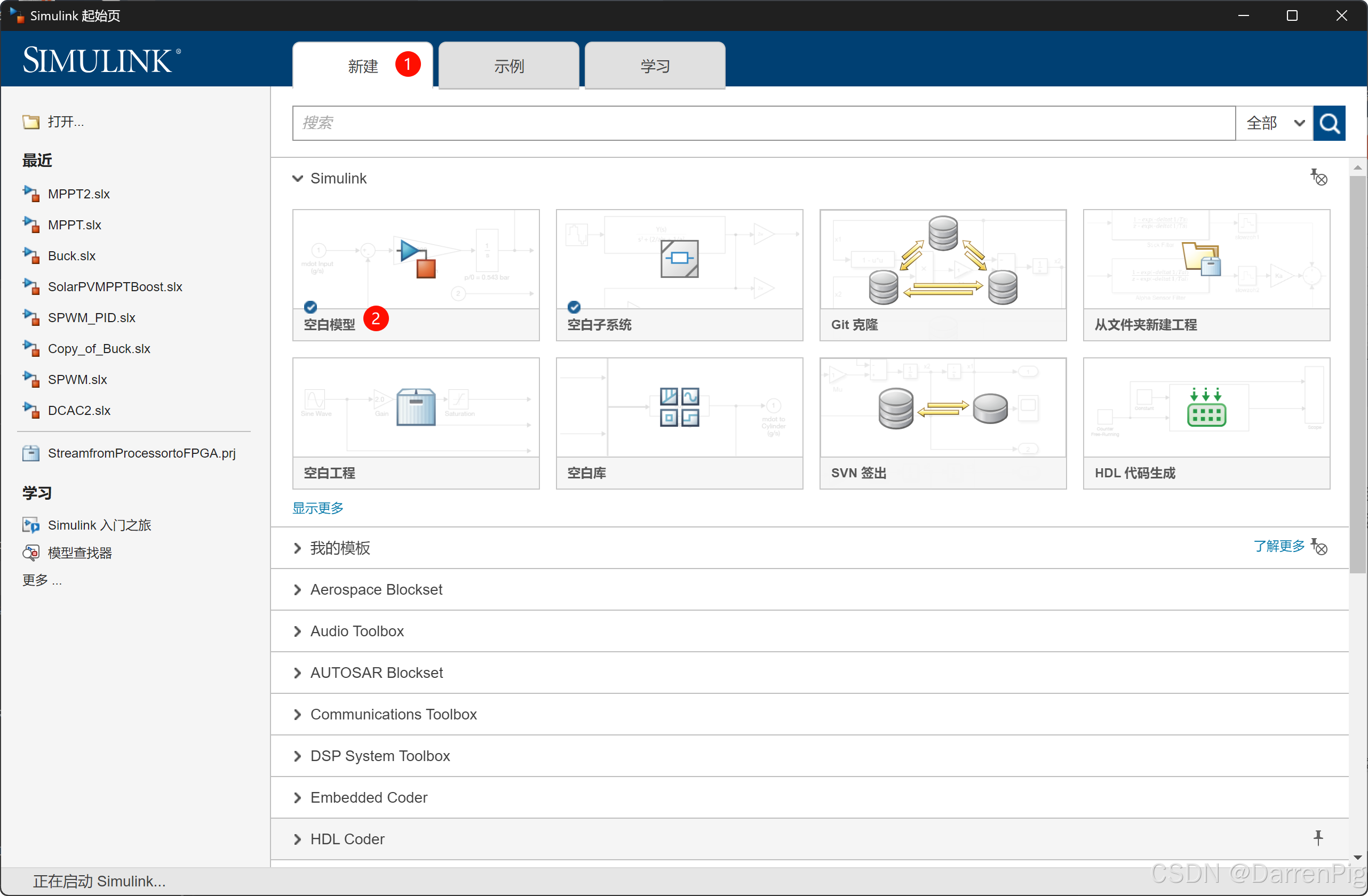
上面的是模型的打开,选中空白模型
模型界面(首次打开)会等待几分钟
打开库管理器就可以找到下面的模型,用到的如下,可以挨个复制


Mosfet
Universal bridge
DC voltage
RLC Branch
Pulse Generator
Mux
Powergui
vollage measurement
scope
然后把这些都拖动到
(二)Buck电路仿真模型及元件连接
- 建立仿真模型:使用Matlab/Simulink等仿真软件,搭建Buck电路的仿真模型。包括直流电压源、MOSFET管、二极管、电感电容滤波电路、负载电阻等元件的添加和连接。
- 元件连接:
- 直流电压源连接到MOSFET管的漏极
- MOSFET管的源极连接到电感的一端
- 电感的另一端连接到负载电阻的一端和电容的一端
- 电容的另一端连接到负载电阻的另一端和地
- 二极管的阳极连接到MOSFET管的源极,阴极连接到电感的另一端
(三)Buck电路关键模块参数设置
- 直流电压源(DC Voltage Source):
- 模块参数设置:在“Block Parameters (DC Voltage Source)”对话框中,设置“Sample based”为“off”,“Sample time (-1 for inherited)”为“-1”,“Input signal (v)”为“0”,“Output voltage (V)”为“100”,“Source impedance (ohms)”为“0”,“Output current (A)”为“0”,“Sample time (-1 for inherited)”为“-1”,“Input signal (v)”为“0”,“Output voltage (V)”为“100”,“Source impedance (ohms)”为“0”,“Output current (A)”为“0”,“Sample time (-1 for inherited)”为“-1”
- MOSFET管(MOSFET):
- 模块参数设置:在“Block Parameters (MOSFET)”对话框中,设置“Type”为“N-channel enhancement mode”,“Rs (ohms)”为“0.1”,“Cs (F)”为“1e-12”,“Rs (ohms)”为“0.1”,“Cs (F)”为“1e-12”
- 电感(Inductor)和电容(Capacitor):
- 电感:在“Block Parameters (Inductor)”对话框中,设置“Inductance (H)”为“1e-3”,“Series resistance (ohms)”为“0.1”
- 电容:在“Block Parameters (Capacitor)”对话框中,设置“Capacitance (F)”为“1e-3”,“Series resistance (ohms)”为“0.01”
- 负载电阻(Resistor):
- 在“Block Parameters (Resistor)”对话框中,设置“Resistance (ohms)”为“1”
(四)运行仿真与结果分析
- 运行仿真:设置仿真参数,如仿真时间、步长等,运行仿真模型。
- 结果分析:
- 输出电压波形分析:观察输出电压波形,检查是否稳定在目标值附近。如果输出电压波动较大,可能需要调整电感、电容或占空比。
- 效率分析:计算Buck电路的效率,分析能量转换效率。
- 纹波分析:测量输出电压的纹波大小,评估滤波效果。如果纹波过大,可以考虑增加电容值或调整占空比。
- 动态响应分析:改变输入电压或负载条件,观察输出电压的动态响应,评估电路的稳定性和响应速度。
(五)故障诊断与排除
- 常见故障及原因分析:
- 输出电压过高或过低:可能是占空比设置不当或反馈控制环节出现问题。
- 输出电压纹波过大:可能是电感、电容值选择不合适或开关频率过低。
- 电路无法正常工作:可能是元件连接错误或参数设置不合理。
- 故障诊断与排除方法:
- 使用示波器等工具,检查关键节点的波形,如输入电压、输出电压、MOSFET管的栅极驱动信号等。
- 根据波形特征,判断故障类型和位置。
- 针对故障原因,调整参数或修复连接,重新运行仿真,验证故障是否排除。
仿真二:逆变电路与 SPWM 控制技术仿真
一、仿真目的
- 学习单相及三相逆变变换电路的仿真方法
- 学习研究 SPWM 控制技术的作用
- 掌握逆变电路中滤波与信号频谱分析方法
二、仿真内容
(一)单相逆变电路仿真
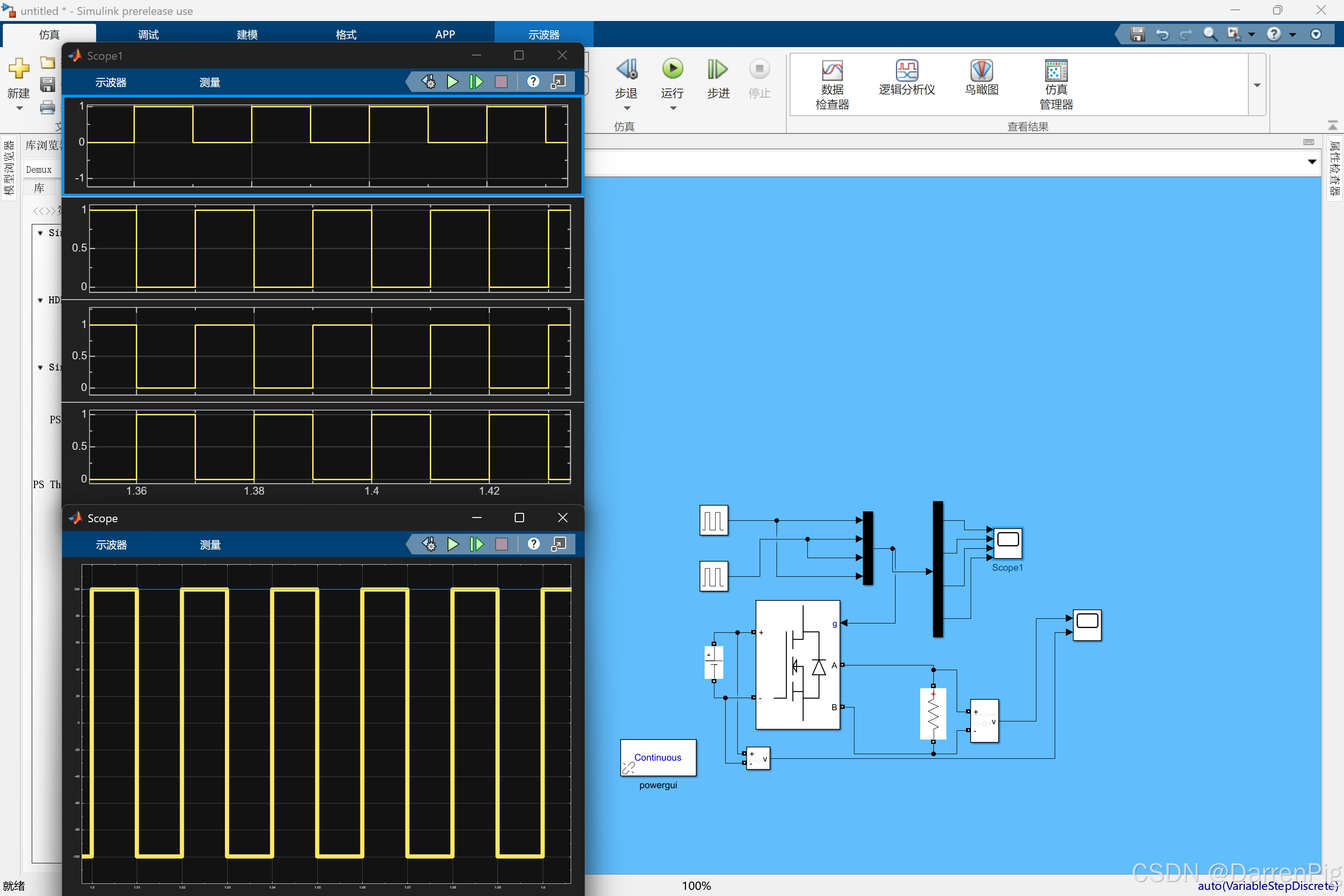
- 建立单相逆变电路的仿真模型,对比研究逆变电路的控制信号分别为简单控制信号(即某个开关管的控制信号为 “半周期高电平半周期低电平” 的形式,可以不含有死区时间的设置)与 SPWM 信号时,逆变结果的差异。
- 对比观察逆变控制信号的差异 :通过对比两种控制信号,可以直观地看到简单控制信号和 SPWM 信号在波形上的不同。简单控制信号是一种较为基础的开关控制方式,而 SPWM 信号则具有更高的频率和更复杂的调制特性,能够更精确地控制逆变电路的输出。
- 对比观察逆变输出信号的波形以及频谱结构的差异 :信号频谱分析步骤如下:
- 待分析信号从示波器中导出
- 选择 “powergui\Tools\FFT Analysis”
- 分析相应信号的频谱
简单控制信号的逆变输出信号频谱较为复杂,谐波成分较多,而 SPWM 信号的逆变输出信号频谱则相对集中,谐波含量较低,这使得 SPWM 控制技术在逆变电路中具有更好的性能和更高的电能质量。
- 建立含有 LC 滤波电路的单相逆变电路的仿真模型,对比研究逆变电路的控制信号分别为简单信号与 SPWM 信号时,最终逆变输出结果的差异,以及滤波电路的截止频率对最终逆变输出的影响。
- 对比观察最终逆变输出信号的波形以及频谱结构的差异 :添加 LC 滤波电路后,两种控制信号下的逆变输出波信号形和频谱结构进一步得到改善。简单控制信号的逆变输出信号经过滤波后,谐波成分有所减少,但仍不如 SPWM 信号控制下的逆变输出信号纯净。而 SPWM 信号控制下的逆变输出信号在经过 LC 滤波后,能够更接近理想的正弦波,频谱特性更加优良。
- 研究 LC 滤波电路的参数(滤波截止频率)对最终逆变输出的影响 :通过改变 LC 滤波电路的参数,如电感 L 和电容 C 的值,可以调整滤波电路的截止频率。一般来说,截止频率的选择需要根据逆变电路的输出频率和负载特性来确定。当截止频率时较低,滤波效果较好,但可能会导致信号的相位移和幅值衰减;而截止频率较高时,虽然滤波效果相对较弱,但能够更好地保留信号的高频特性。经过实验发现,当 L、C 的参数均取为 1/(2pi50) 或其他合适参数时,能够取得较好的滤波效果,使逆变输出信号的质量得到显著提高。
(二)三相逆变电路仿真
- 建立三相逆变电路仿真模型。
- 观察三相逆变电路在简单控制信号控制时的输出相电压、线电压等信号的波形图。在简单控制信号下,三相逆变电路的输出相电压和线电压呈现出方波的特性,波形较为粗糙,谐波含量较高。
- 对比观察三相逆变电路的简单控制信号与 SPWM 控制信号的波形图。SPWM 控制信号的波形则要平滑得多,其调制特性使得输出的相电压和线电压更接近正弦波,谐波成分得到了有效的抑制。
- 观察三相逆变电路在 SPWM 信号控制时的输出相电压、线电压等信号的波形图,并与步骤 2 中的情况作对比。通过对比可以看出,SPWM 控制技术在三相逆变电路中具有明显的优势,能够显著提高电能质量,减少对电网的谐波污染。
- 给三相逆变电路添加 LC 滤波,观察滤波后的有关输出。添加 LC 滤波后,三相逆变电路的输出信号得到了进一步的优化,波形更加平滑,谐波含量进一步降低,能够更好地满足负载对电能质量的要求。
仿真三:PI 控制在 DC/DC 变换电路及 DC/AC 变换电路中的应用
一、仿真目的
- 学习 PI 控制在 DC/DC 变换电路中的应用
- 学习 PI 控制在 DC/AC 变换电路中的应用
- 练习 PI 参数调节的相关方法
二、仿真内容
(一)PI 控制在 DC/DC 变换电路中应用
- 建立基于 PI 控制的 buck 电路仿真模型。
-
输入电压 Ui 设为 100V,电感 L 和电容 C 的量值可以均设为:1e-3,电阻取值为 1,PID 控制器的设置为:
- 在此模型中,PI 控制器的输出量被用作 buck 电路中开关管的占空比控制信号。通过调节 PI 参数,可以实现对输出电压的精确控制。当 PI 控制器的输出超过 1 时,可能会导致开关管一直处于导通或截止状态,无法正常工作,因此需要将其限制在 0~1 之间,以确保电路的稳定运行。
-
调节 PI 参数,观察电路的输出电压是否能够很好地趋向并稳定在目标值:50V :PI 参数调节可以按照先调 P 参数(比例参数),再调 I 参数(积分参数)的方式进行。先调 P 参数时可以把 I 参数定为 0,P 参数调整得比较合适后,再添上 I 参数。通过反复试验和调整 PI 参数,可以观察到当 PI 参数设置合理时,电路的输出电压能够快速地趋向并稳定在 50V 的目标值,实现对输出电压的精确控制。
-
(二)PI 控制在单相 DC/AC 变换电路中应用
- 建立基于 PI 控制的单相 DC/AC 变换电路仿真模型。
-
输入电压 Ui 设为 380V,电感 L 和电容 C 的量值可以均设为:1/(2pi50),电阻取值为 1,Sin 信号模块的参数设置为:
- 在此模型中,PI 控制器的输出量被用作逆变电路中开关管的调制信号,通过与正弦波信号的比较产生 PWM 控制信号,从而控制逆变电路的输出电压。由于正弦波信号的幅值范围在 -1~1 之间,因此需要将 PI 控制器的输出限制在 -1~1 之间,以确保 PWM 控制信号的正确性。
-
PID 控制器的设置为:
- 调节 PI 参数,观察电路的输出电压是否能够很好地趋向并稳定在目标值:220V/50Hz 的正弦交流电。PI 参数同样可以按照先调 P 参数(比例参数),再调 I 参数(积分参数)的方式进行调节。通过合理设置 PI 参数,可以使逆变电路的输出电压波形接近理想的正弦波,频率稳定在 50Hz,幅值稳定在 220V 左右。此时的 PI 控制器只需要稍微设置参数,即可获得很好的控制效果,这说明在单相 DC/AC 变换电路中,PI 控制具有较高的控制精度和稳定性。
-
仿真四:光伏发电系统中最大功率点跟踪技术仿真
一、仿真目的
- 学习研究扰动观察法最大功率点跟踪技术的仿真方法
- 学习研究电导增量法最大功率点跟踪技术的仿真方法
- 掌握有关仿真电路的搭建方法与技巧
二、仿真内容
(一)扰动观察法最大功率点跟踪技术
-
建立由光伏阵列及 buck 电路构成的电路系统模型。其中最大功率点跟踪子系统(subsystem,可以改名为 mppt)的电路结构如下:
- 其中 PWM 信号产生子系统(pwm)的电路结构(此部分可以用软件自带的模块 “PWM Generator (DC-DC)” 代替,更方便):
- 部分模块的参数设置:
- PV Array:
- Zero-Order Hold 与 Zero-Order Hold1:
- Merory 与 Merory1:
- Merory2:
- Saturation(限幅项):
-
运行仿真模型,观察最大功率点跟踪的过程,并进行以下探究。
- 探究 buck 电路控制信号的占空比调整步长 (ΔD) 对最大功率点跟踪过程的影响 :占空比调整步长 ΔD 的大小会影响 MPPT 的速度和精度。较大的 ΔD 可以加快跟踪速度,但可能会导致在最大功率点附近振荡,影响跟踪精度;较小的 ΔD 则能够提高跟踪精度,但跟踪速度较慢。通过实验可以观察不同 ΔD 值下最大功率点跟踪过程的变化,找出适合的 ΔD 值以达到较好的跟踪效果。
- 探究电路信号的采样时间 (Zero-Order Hold 的时间设置) 对最大功率点跟踪过程的影响 :采样时间的长短也会影响 MPPT 的性能。较短的采样时间能够更及时地反映光伏阵列的输出变化,加快跟踪速度;但过短的采样时间可能会引入更多的噪声和干扰,影响跟踪精度。较长的采样时间则会使跟踪速度变慢,无法及时响应光照强度和温度等环境参数的变化。通过调整 Zero-Order Hold 的时间设置,可以观察采样时间对最大功率点跟踪过程的影响,确定合适的采样时间。
- Merory2 模块的初始值可以设为 0 或 0.4 或其它值,对比仿真结果会有怎样的不同,思考原因 :Merory2 模块的初始值会影响 MPPT 的起始状态和收敛过程。不同的初始值可能导致最大功率点跟踪的初始方向和速度不同,进而影响整个跟踪过程的收敛时间和稳定性。例如,当初始值设置为 0 时,可能需要较长的时间才能逐渐寻找到最大功率点;而当初始值设置为 0.4 时,可能会更快地接近最大功率点,但也可能会出现一定的振荡。通过对比不同初始值下的仿真结果,可以更好地理解初始值对 MPPT 算法的影响。
- 思考负载电阻值的取值要求 :负载电阻值的大小与光伏阵列的最大功率输出密切相关。为了使光伏阵列能够在最大功率点运行,负载电阻值需要满足一定的条件。一般来说,负载电阻值应该与光伏阵列在最大功率点的等效内阻相匹配,这样才能够实现最大功率传输。如果负载电阻值过大或过小,都会导致光伏阵列的输出功率降低,无法达到最大功率点。
- 尝试创造出光伏阵列所处的环境参数变化 (光照强度、温度变化),观察相应的最大功率点跟踪过程 :通过改变光伏阵列的光照强度和温度等环境参数,可以模拟实际应用中光伏系统的运行工况。观察在环境参数变化时最大功率点跟踪过程的变化,可以验证 MPPT 算法的适应性和鲁棒性。例如,当光照强度突然增加或减小时,MPPT 算法能够及时调整控制策略,使光伏阵列迅速跟踪到新的最大功率点,确保系统的稳定运行。
-
尝试建立由光伏阵列与 boost 电路构成的电路系统模型,并在此模型中演示扰动观察法最大功率点跟踪过程。与 buck 电路相比,boost 电路具有不同的拓扑结构和工作原理,但 MPPT 的基本思想和方法是类似的。通过建立 boost 电路模型并进行仿真,可以进一步加深对扰动观察法最大功率点跟踪技术的理解和掌握,同时了解不同拓扑结构电路在光伏发电系统中的应用特点。
(二)电导增量法最大功率点跟踪技术
- 建立由光伏阵列及 buck 电路构成的电路系统模型。其中最大功率点跟踪子系统 (mppt) 的电路结构如下:
- 运行仿真模型,观察最大功率点跟踪的过程。
- 对比扰动观察法与电导增量法,找出两者的差异。扰动观察法是通过周期性地扰动光伏阵列的工作点,观察功率的变化趋势来判断是否接近最大功率点;而电导增量法则是基于光伏阵列的伏安特性,通过测量光伏阵列的电压和电流变化率来确定最大功率点的方向。电导增量法具有跟踪精度高、响应速度快等优点,但其算法相对复杂,对电路参数的精度要求较高。
- 探究电导增量法最大功率点跟踪过程中的影响因素。例如,光伏阵列的参数变化、电路元件的精度、环境因素等都可能对电导增量法的跟踪效果产生影响。通过分析这些影响因素,可以采取相应的措施来提高电导增量法的最大功率点跟踪性能,确保光伏发电系统在各种工况下都能稳定、高效地运行。
2025.04.23 源自于 陈磊教授的新能源电力转换与控制仿真课