AI飞行行为的可解释性与合规审计机制设计
随着低空无人机集群的智能化演化,其“飞行行为”逐渐成为高风险、高关联的自治决策体。如何解释、追溯与审计这些决策,不仅关乎技术透明,也关乎空域安全、事故责任与合规运行。本文聚焦AI飞控系统中行为可解释性问题,提出行为轨迹日志、策略回溯结构、模型约束机制三种审计设计路径,并构建以“荷鲁斯之眼+RT-AI Cluster”为核心的合规执行参考架构。
一、AI系统决策行为的“黑箱化”困境
1.1 深度学习策略不透明:同一输入可能触发不同飞行动作,难以溯因。
例如在复杂城市峡谷或山区强干扰场景下,无人机可能在视觉模糊区域中做出异于预期的侧滑或回旋动作,无法从外部观察中判断是否为模型自适应行为还是异常误判,严重制约事故追责与系统优化。
1.2 编队决策“局部偏移”难解释:某台飞行器为何突然偏离航线?为何选择某种规避策略?
1.3 航空监管视角的核心需求:
- 谁触发?
- 何时决策?
- 基于何种状态?
- 是否存在异常行为?
二、行为可解释性的结构化机制设计
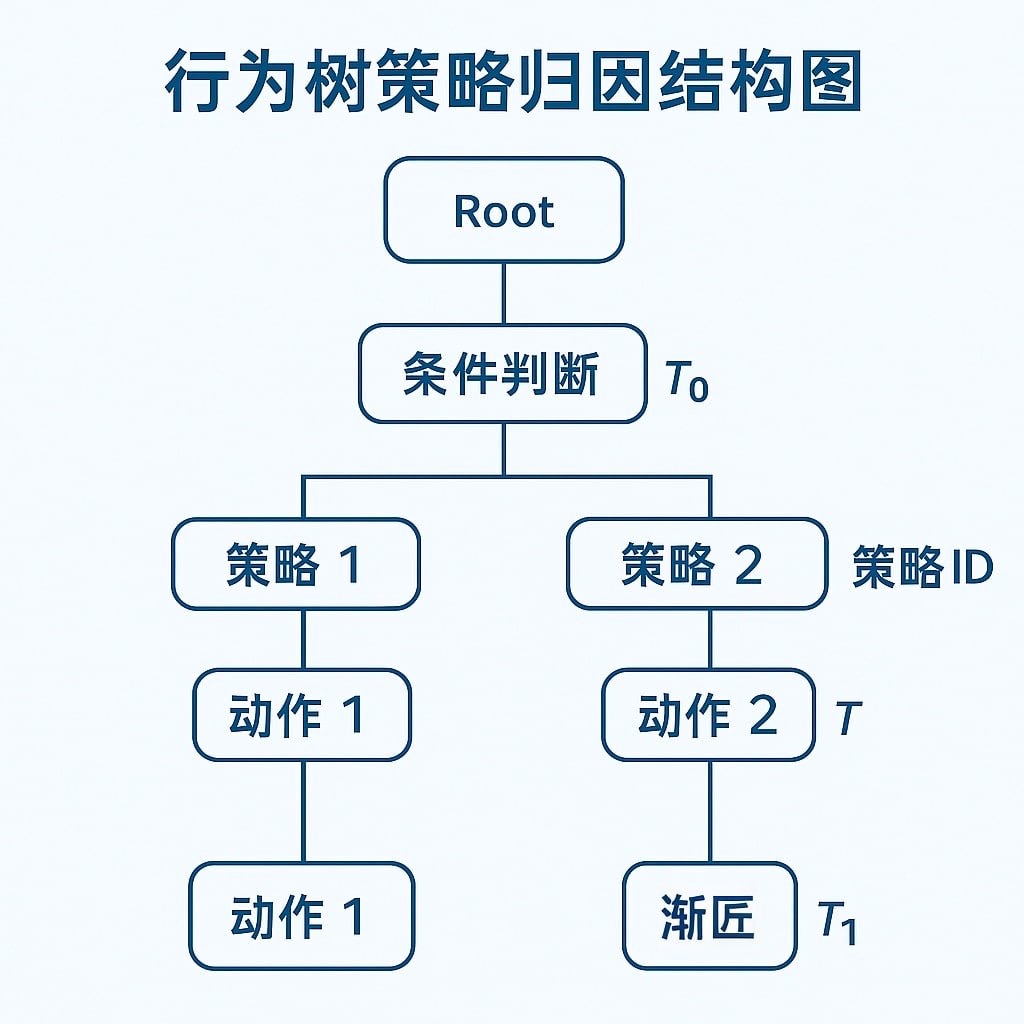
2.1 飞行行为树挂载结构(行为意图显性化)
- 所有策略均挂载于行为树节点,执行前后自动记录节点路径与状态戳
- 结合“决策动作簿”构建语义层策略归因机制
- 示例:飞行避障模块的行为树结构可简化为:Root → 遇障判断 → 右转避让 → 原路径恢复,完整记录每一节点执行及触发条件
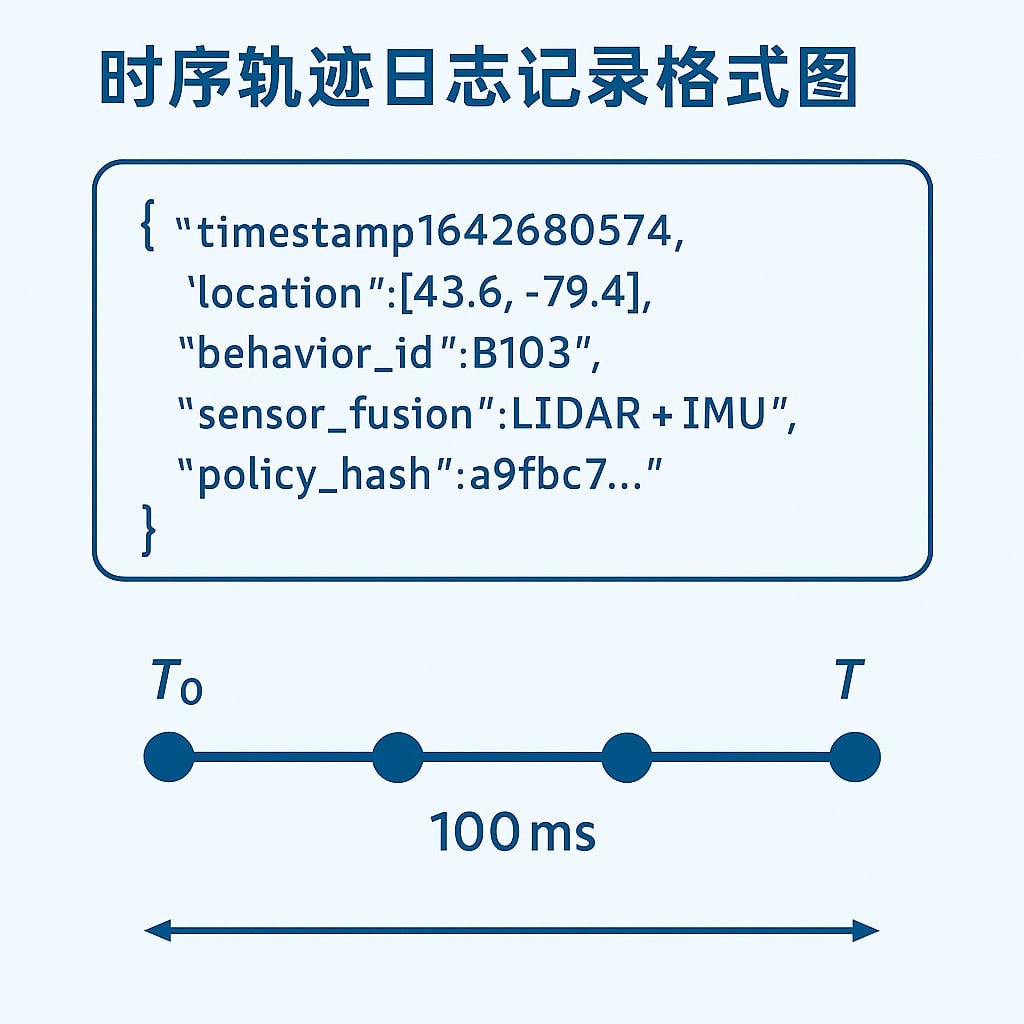
2.2 时序轨迹日志机制(空间行为可回溯)
- 基于荷鲁斯之眼芯片的IMU+图像融合,每100ms记录一次“决策状态-运动轨迹”
- 日志数据结构采用压缩JSON格式,包含:时间戳、位置坐标、行为节点ID、传感融合值、当前策略HASH
- 支持本地循环缓存与飞后快速导出,便于系统调试与事故调查
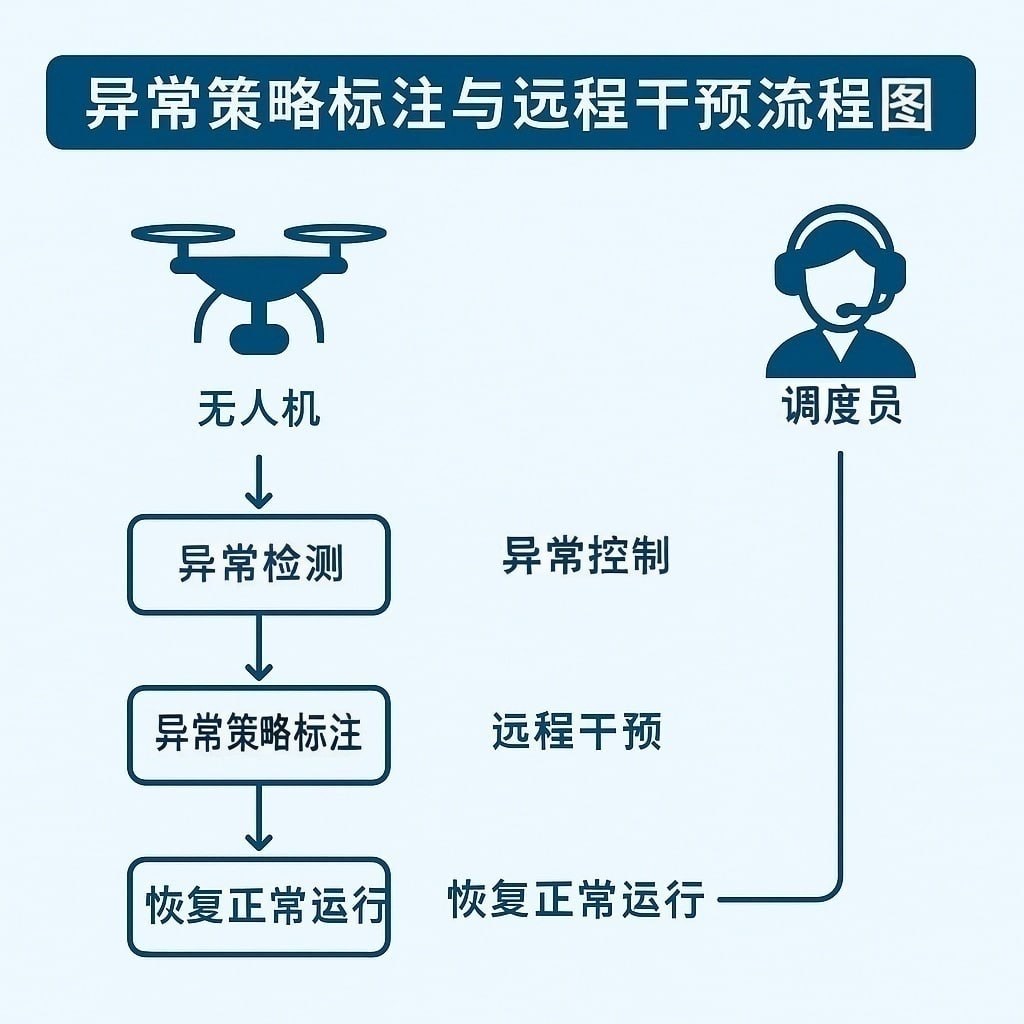
2.3 策略执行异常标注与干预接口
- 行为树节点集成“阈值触发规则”,一旦出现异常选择路径即打标签
- RT-AI平台允许管理端通过API远程注入“标注节点/重构命令”
三、可裁定性框架设计:让AI具备“法律责任接口”
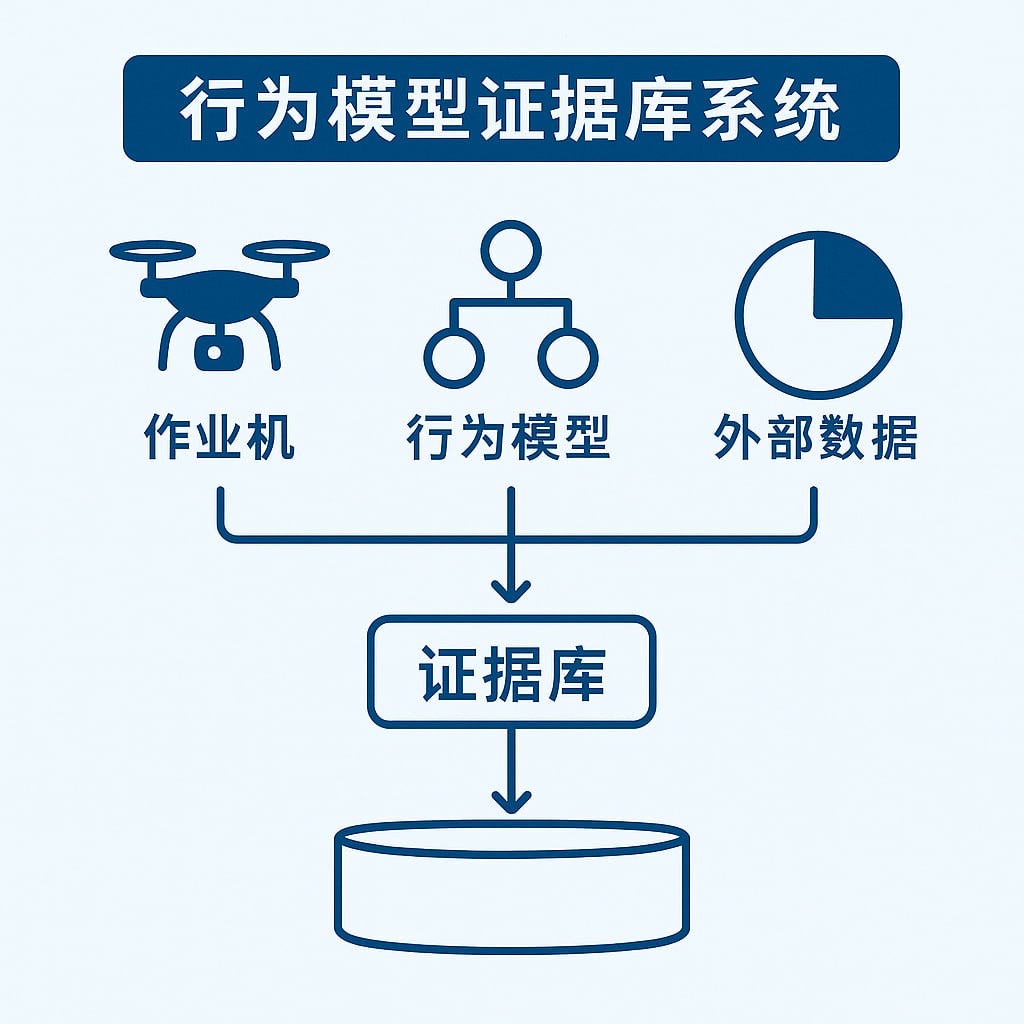
3.1 行为模型证据库机制
- 所有模型版本需伴随“元数据描述 + 决策样本集”
- 关键策略输出绑定模型HASH,实现指纹化溯源
3.2 空中责任区分设计
- 决策节点可对应具体飞行器编号,行为决策在日志中标明“自发 / 被派发”状态
- 平台判断:AI指令 vs 飞手人工干预,系统对行为链中引入的飞手操作时间点进行标记比对
- 执行逻辑示例:若平台检测到飞行器突发规避轨迹,与飞手输入时间重合,则审计视图提示“疑似干预”,并触发人工复核流程

3.3 飞行事故对抗审计机制
- 多机状态快照协同比对机制(用于证明飞行意图一致)
- 异常区域飞行行为图谱归档(如偏航过频、集体漂移)
四、睿途平台的可解释性增强实践
4.1 荷鲁斯之眼行为日志模块:
- 节点策略执行链条结构
- 本地IMU图像压缩同步记录模块
4.2 RT-AI可审计调度引擎:
- 所有任务下发均带有语义标签、任务ID、调度权重字段
- 所有飞行任务接受/拒绝过程全链路记录
4.3 睿途·空域合规回放系统雏形
- 飞行行为图谱引擎(动态回放+行为树同步)
- 管理者标签审计视图支持多维交互:
- 按时间轴可筛选飞行行为突变点
- 按飞手ID、机型、空域区域等字段索引异常行为集
- 支持行为节点可视化渲染与语义跳转定位,辅助管理者复现并理解AI系统的“行为链条”
结语
AI并非不透明,而是缺少“可阅读接口”。睿途正在构建一种“可解释+可审计+可仲裁”的低空AI行为系统,为未来空中合规运行与责任判断提供工程级落地样本。