平面连杆机构(上)
1、平面四杆机构的类型与演化
1)平面四杆机构的类型
a、铰链四杆机构:曲柄摇杆机构、双曲柄机构、双摇杆机构
b、其他四杆机构:曲柄滑块机构、导杆机构、滑块机构、双滑块机构、偏心轮四杆机构......
2)平面四杆机构的演化
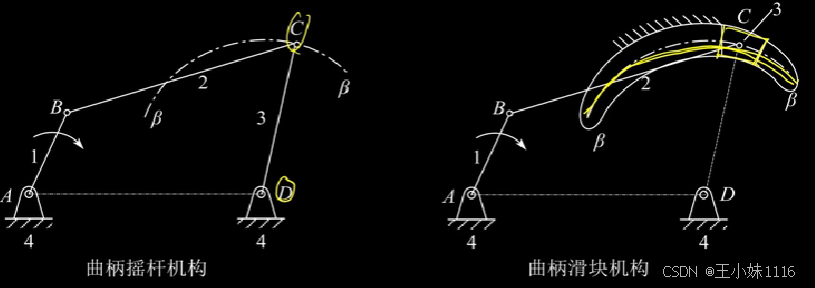
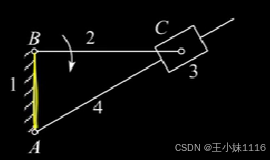
a、改变构件的形状和尺寸:曲柄摇杆机构-->摇杆无限长(CD无限延长)-->曲柄滑块机构
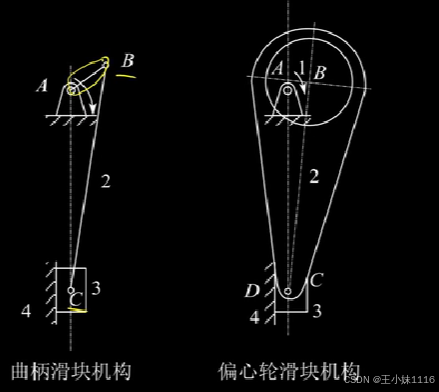
b、改变运动副的尺寸:曲柄滑块机构-->曲柄(AB)和连杆(BC)合并为偏心轮-->偏心轮滑块机构
c、选用不同的构件为机架:曲柄滑块机构-->将曲柄(AB)作为机架-->导杆机构
2、铰链四杆机构具有曲柄的条件
1)铰链四杆机构具有曲柄的条件
(1)铰链四杆机构具有曲柄的条件
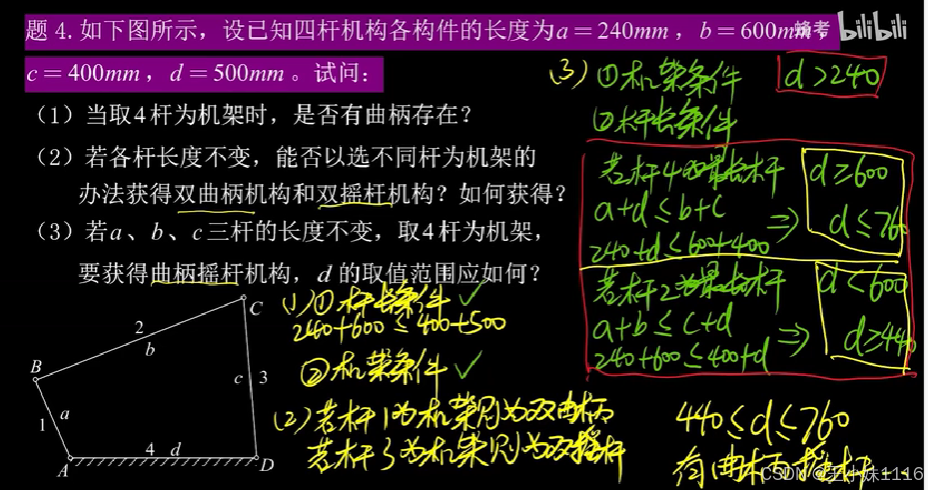
a、最短杆与最长杆之和小于等于其余两杆之和:杆长条件
b、最短杆为机架或连架杆(连接杆只有一段固定):机架条件
(2)满足杆长条件,取不同构件为机架
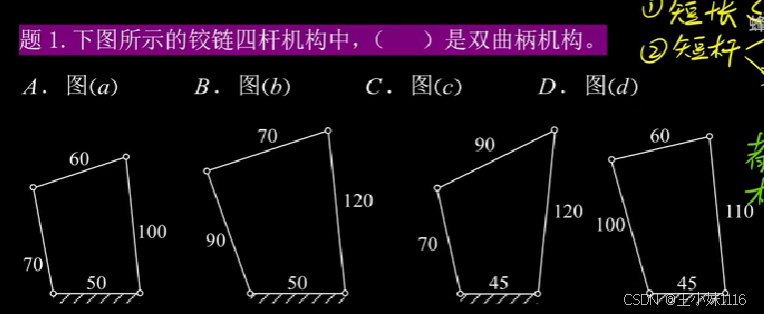
a、最短杆为机架,则有双曲柄机构
b、最短杆为连架杆,则有曲柄摇杆机构
c、最短杆的对边为机架,则有双摇杆机构
(3)不满足杆长条件:若不满足杆长条件则为双摇杆机构
在铰链四杆机构中,不满足杆长之和条件时,一定无曲柄。想要有曲柄曲柄必须满足杆长条件
区分不同最长杆的情况,例如第3问,d可能是最长杆、b也可能是最长杆
3、平面四杆机构的急回特性与形成速比系数
1)急回特性
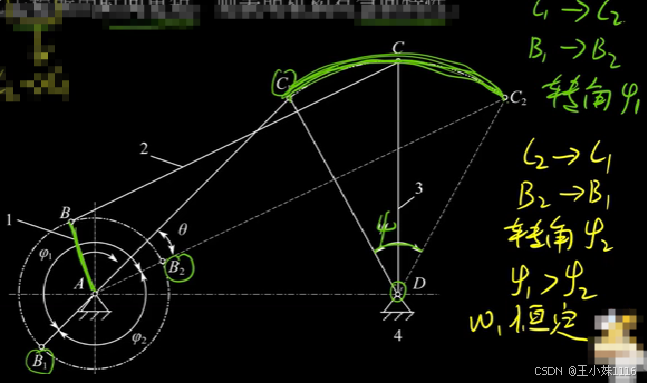
概念:平面四杆机构中,当主动件曲柄匀速转动时,遥杆或滑块等从动件在两极限位置回程(c2->c1)比去程(c1->c2)所用时间更短,表明机构有急回特性
铰链四杆机构一定具有急回特性(×),当=0时,去程和回程时间一致不具有急回特性
2)形成速比系数
急回特性的程度可以进行速度比系数K来表示:为极位夹角=(ri-r2)/2,极位夹角越大,K越大,急回特性越明显。
曲柄极位夹角:从动件两个极位时曲柄夹角

4、铰链四杆机构的传动角与死点
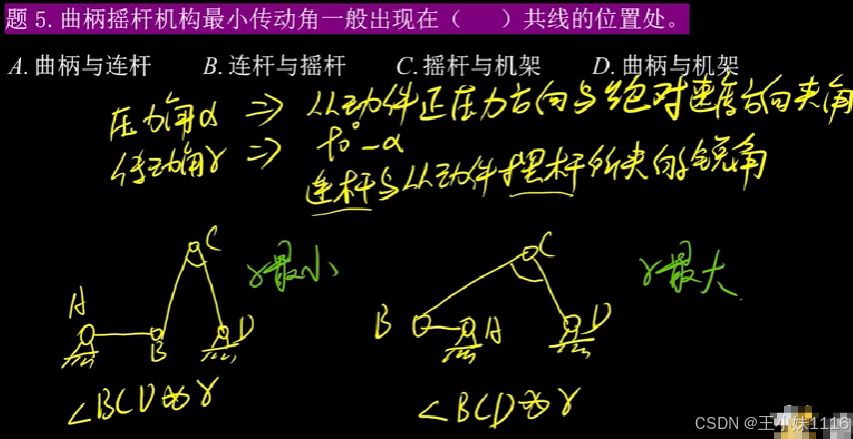
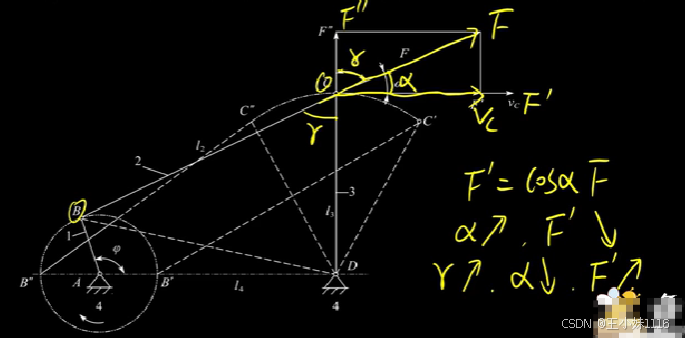
1)压力角与传动角:作用在从动件上的驱动力与核心作用点绝对速度方向所加的锐角α称为压力角。压力角的余角γ为传动角。压力角越大,力F的有效分力就小,不利于传动
传动角γ取最大时(90°),传动效率最大
2)死点
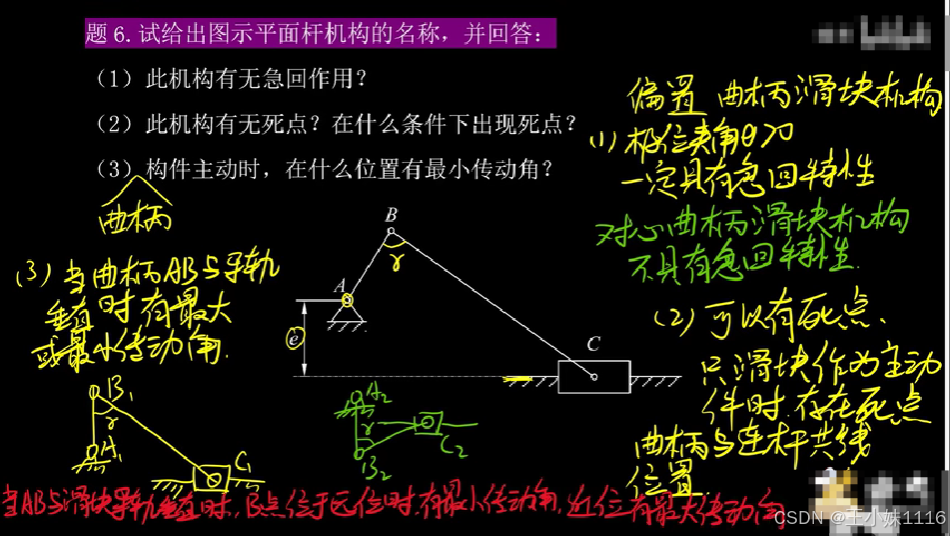
机构的传动角为0的位置称为死点位置。死点会使机构运动出现卡死,应该避免。但一部分夹具利用四点特性来防松。
死点位置:摇杆主动且曲柄与连杆共线,产生死点位置
从动件时曲柄,主动件是滑块或摇杆-->存在死点;主动件时曲柄,就无死点
传动角的最大和最小都出出现在曲柄和机架共线的时候