运动控制【指令】codesys
 POUs表示程序块
POUs表示程序块
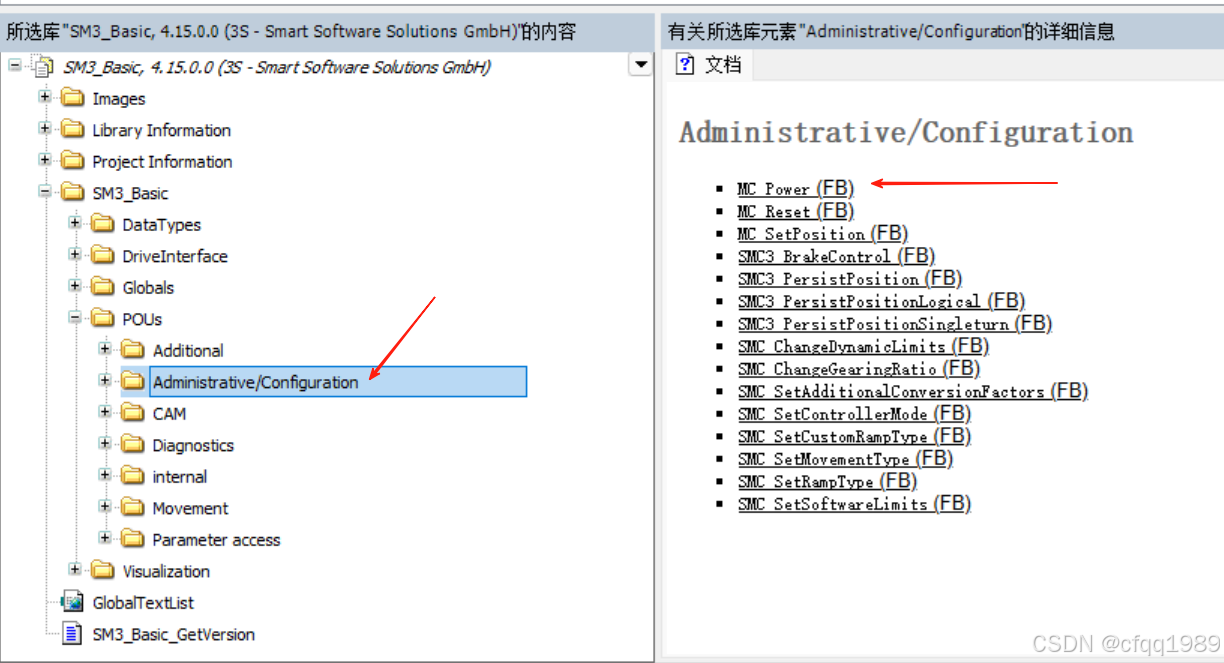
1基础控制
电源
MC_Power复位
MC_Reset设置电机位置
MC_SetPosition回零
MC_Home点动
MC_Jog暂停
MC_Halt急停
MC_Stop============================【轴组:】===============
电源
SMC_GroupPower使能
MC_GroupEnable【先电源后使能】MC_GroupDisable复位
MC_GroupReset电机运动
MC_GroupSetPosition【笛卡尔空间坐标】//回零在驱动器上点动
SMC_GroupJog【】SMC_GroupJog2暂停
MC_GroupHalt【暂停】SMC_GroupWait【等待】急停
MC_GroupStop中断
MC_GroupInterrupt绝对运动
MC_MoveCircularAbsolute【圆弧插补】
MC_MoveDirectAbsolute【G0绝对定位】
MC_MoveLinearAbsolute【直线插补】相对运动
MC_MoveCircularRelative【圆弧插补】
MC_MoveDirectRelative【G0相对定位】
MC_MoveLinearRelative【直线插补】
2中级控制
从轴跟随
SMC_FollowPosition【位置,跟随】
SMC_FollowPositionVelocity【位置和速度,跟随】
SMC_FollowSetValues【设置选项,跟随】
SMC_FollowVelocity【速度,跟随】
SMC_TrackAxis【追随】
SMC_TrackSetValues【按设定值,追随】
MC_CamIn【凸轮轨迹】MC_CamOut
MC_GearIn【电子齿轮】MC_GearInPos【捏和位置】MC_GearOut
MC_Phasing【主从轴相位偏移】
轴组跟随 SMC_ControlAxisByPos【位置,跟随】
SMC_ControlAxisByPosVel【位置和速度,跟随】
SMC_ControlAxisByVel【速度,跟随】
3速度模式
速度模式
MC_MoveVelocity
4力矩模式
设置扭矩
SMC_SetTorque
5定位模式
绝对定位
MC_MoveAbsolute
MC_MoveAdditive【补丝杠间隙】MC_MoveSuperImposed相对定位
MC_MoveRelative