当高级辅助驾驶遇上“安全驾校”:NVIDIA如何用技术给无人驾驶赋能?
高级辅助驾驶技术的商业化落地,核心在于能否通过严苛的安全验证。国内的汽车企业其实也在做高级辅助驾驶,但是吧,基本都在L2级别。换句话说就是在应急时刻内,还是需要人来辅助驾驶,AI驾驶只是决策层,并不能完全掌握汽车。而国内做的比较好的品牌达到L4级别的,例如之前很火的萝卜快跑、或者目前智己汽车(并未大量推广),也都并没达到非常理想的状态。而NVIDIA近期推出的DRIVE AI系统检测实验室,不仅是行业首个通过ANAB认证的综合性安全检测平台,更通过全栈技术布局,为自动驾驶系统的功能安全、网络安全和AI可靠性设定了新标杆1710。至于NVIDIA如何实现用“黑科技”将高级辅助驾驶汽车提高到更进一步的层次的,待小lo在这篇文章中给大家简单展开讲讲,我们将从以下三个维度:技术架构、验证方法和生态协同,解析这一实验室的硬核实力。

图片来自NVIDIA 推出 DRIVE AI 系统检测实验室,树立新的行业安全里程碑 | NVIDIA 英伟达博客
全栈安全架构:从芯片到算法的“三重复合验证”
硬件层:冗余设计与芯片级安全防护
首先就是推出的NVIDIA DRIVE AGX平台的硬件设计采用模块化冗余架构,以应对关键组件故障。例如:
-
DRIVE AGX Orin SoC:集成双核锁步CPU和独立安全岛,确保即使主处理器失效,安全岛仍能接管控制,触发最小风险状态(如紧急停车或者是遇到行人紧急避让)。其硬件级功能安全机制通过ISO 26262 ASIL D认证,随机硬件故障率低于10^-9 FIT(故障间隔时间)。
-
安全处理器:内置硬件加密引擎,支持AES-256和SHA-3算法,确保密钥管理和通信数据加密的物理隔离,抵御旁路攻击。
软件层:实时操作系统与安全中间件
-
DriveOS 6.0:首个通过ASIL D认证的实时操作系统,采用时间分区和空间隔离)技术,将安全关键任务(如制动控制)与非关键任务(如娱乐音乐等)隔离运行,避免资源争用导致的延迟。
-
DriveWorks中间件:提供传感器抽象层(SAL)和故障注入接口,支持开发者在仿真环境中模拟传感器失效(如摄像头噪点、雷达信号丢失),验证多传感器融合算法的鲁棒性和。
算法层:AI模型的可解释性与对抗防御
-
Hydra-MDP模型:采用多目标优化框架,使用多个专家教师模型来符合各种模拟指标的轨迹 也就是多个模型的打分系统。将交通规则、安全边界和舒适性指标编码为独立损失函数,通过加权决策避免单一目标过拟合。例如,在紧急避障场景中,模型会综合评估“偏离车道”与“碰撞风险”的权重,举个例子吧,例如在一个雨天环境中,雨下的非常大,但是突然出现一个行人,这个时候模型将快速做出判断,是否要偏离行驶路线减速并撞击护栏还是可以在安全距离刹停。并且这个模型已经在CVPR 2024端到端挑战赛中,英伟达团队拿下了0.9274 获得冠军 并且荣获创新奖 。
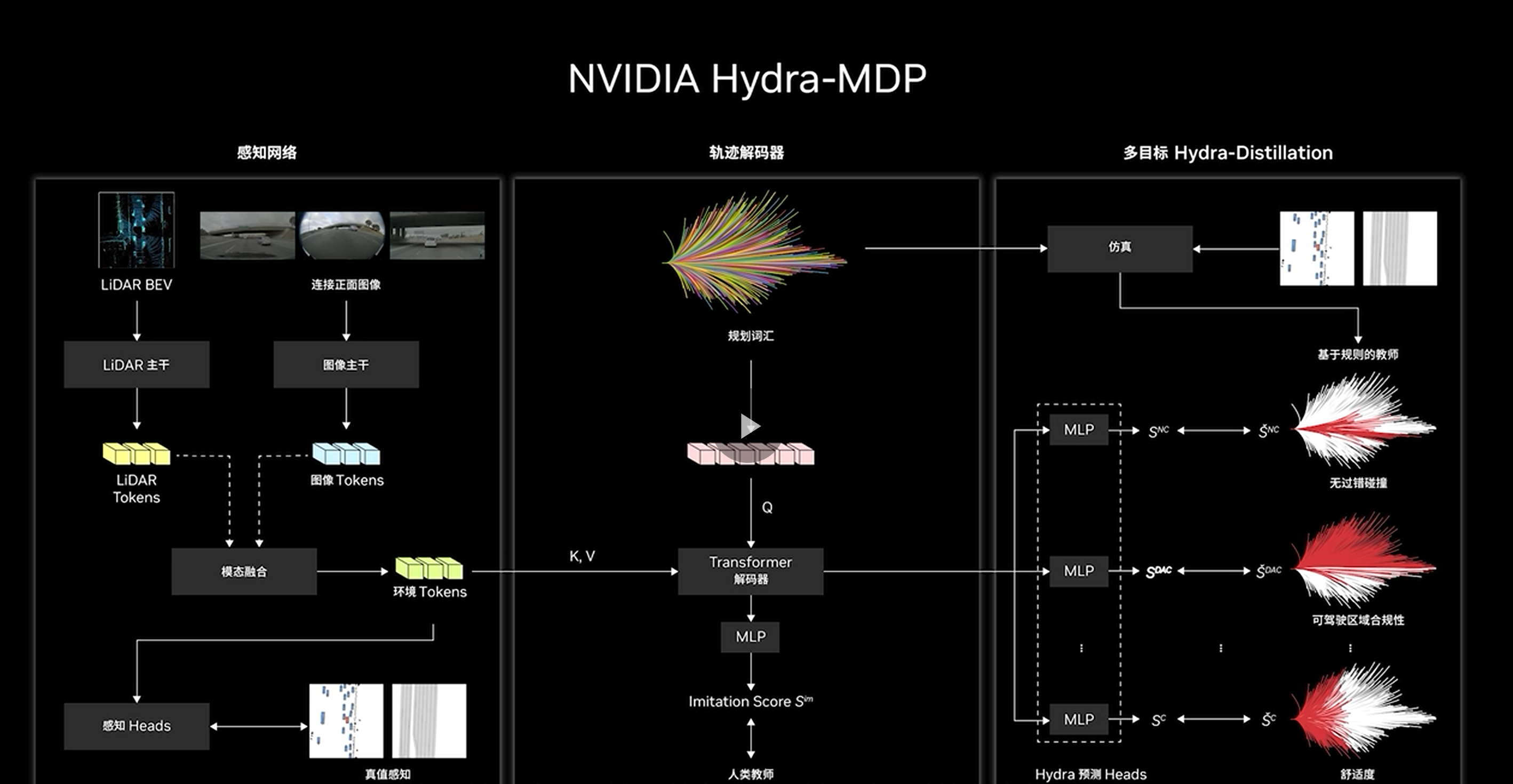 模型架构图片来自端到端自动驾驶:鸟瞰图(BEV)-CSDN直播
模型架构图片来自端到端自动驾驶:鸟瞰图(BEV)-CSDN直播
- 对抗训练:实验室用GAN生成“迷惑性场景”——比如给路标添加干扰条纹,测试系统是否误判为“禁止通行”。通过持续“攻防演练”,AI的“免疫力”显著提升。正如NVIDIA所说:“我们让AI自己当黑客,才能防住真正的黑客。”并且,利用仿真的omniverse clouds api 提供了一个精密的模拟环境 ,允许研究人员和开发人员通过物理模拟生成真实场景 ,将模型集成进了,使用blackwell GPU架构打造了 DRIVE ADX Thor 用于运行这个高级算法,与此同时NVIDIA已经和梅赛德斯奔驰和路虎等车企进行密切合作。预计未来应该可以见到这些车企应用NVIDIA的算法开发更安全的无人驾驶汽车了。
MAPLLM与自动驾驶异常检测的创新应用
MAPLLM是一种结合地图信息与语言模型的实时检测基础模型,他的核心理念在于构建了一对快慢双推理器协同工作(也就是交叉验证),提升自动驾驶系统对复杂场景的判断能力。
- 快推理器:快速响应实时数据(如传感器输入、交通标志识别),初步判断潜在风险(如检测到禁止超速标志时触发紧急制动信号)。
- 慢推理器:基于更深层的语义分析和地图上下文(如区域法规、道路环境语义),对快推理器的结论进行二次验证。例如:
- 当车辆在高速公路上遇到“禁止超速”的大幅标语时,快推理器可能误判为禁止超速标志,触发紧急刹车;
- 而慢推理器结合地图数据(如该路段实际限速)和语境(标语的警示性质而非法规强制),会修正判断为“提醒减速”,从而仅降低车速而非急刹。
通过这种分层推理机制,MAPLLM显著减少了误判风险,提升驾驶平顺性和安全性。
那么如果没有MAPLLM的情况下 假设在城市的快速路上正常的行驶,然后突然看到有个蓝色告示牌,小编身处天津,天津有个牌子叫做禁止开车嬉戏打闹,那么缺少这种上下文理解或者分层推理机制就很可能进行紧急刹车,造成事故追尾。

图片源自证实!这牌牌就是天津“特色”,还有30多个“小伙伴”……
LlaDA:交通规则的“人形翻译官”
LlaDA最初是在GTC 2024 作为生成式AI车内体验的一部分。他是一个是基于扩散模型的多模态语言模型,专为自动驾驶场景设计。大家可以想象一下,假设我们开车到了一个陌生城市,例如一些盘山公路或者一些自治区,路边突然出现个没见过的交通标志,上面写着“禁止某种奇怪操作”(比如“禁止逆向打方向盘”?或者是一些完全看不懂比较冷门的标志)。

这时候LlamaDA会进行及时提醒:它不仅能认出这个标志代表的意义,还可以根据当地法规结合内容快速推理并告知某某某应注意或将被禁止。他可以无缝切换语言并及时于驾驶员沟通,包括但不限于中文、英文、西班牙语。根据地理位置动态获取当地法规(如“禁止掉头”“红灯不可右转”),即使无明确标志也能通过语义推理提醒驾驶员。例如:在某些地区,红灯右转可能被允许或禁止,LLaDA可结合高精地图或实时数据动态判断并提示。

图片源自陌生路况? LLM道路规则指南让驾驶更简单-CSDN直播
EmerNeRF:自监督学习驱动的动态驾驶场景重建
EmerNeRF专注于通过自监督学习从2D图像和激光雷达数据中重建高保真动态驾驶场景。它将场景分解为静态场(如道路、建筑)、动态场(移动物体如车辆、行人)和运动流场(预测物体运动轨迹),并结合DINOv2的语义特征生成四维时空表示(3D空间+时间维度)。这种技术无需人工标注即可自动标注场景中的物体(将所有车辆标记为同一颜色),并支持从任意视角渲染场景,为仿真训练提供高保真数据。他可以通过自监督学习突破动态重建瓶颈,提升场景细节保真度真实的模拟真实世界现场的环境(PS:这项技术和Omniverse平台一结合,感觉想在GTA 5里面一样,普通的是这个更加还原真实世界的物理引擎),并且同时降低标注成本(开发者可以省去开发时间从而更专注模型的优化),加速自动驾驶模型的训练与验证。
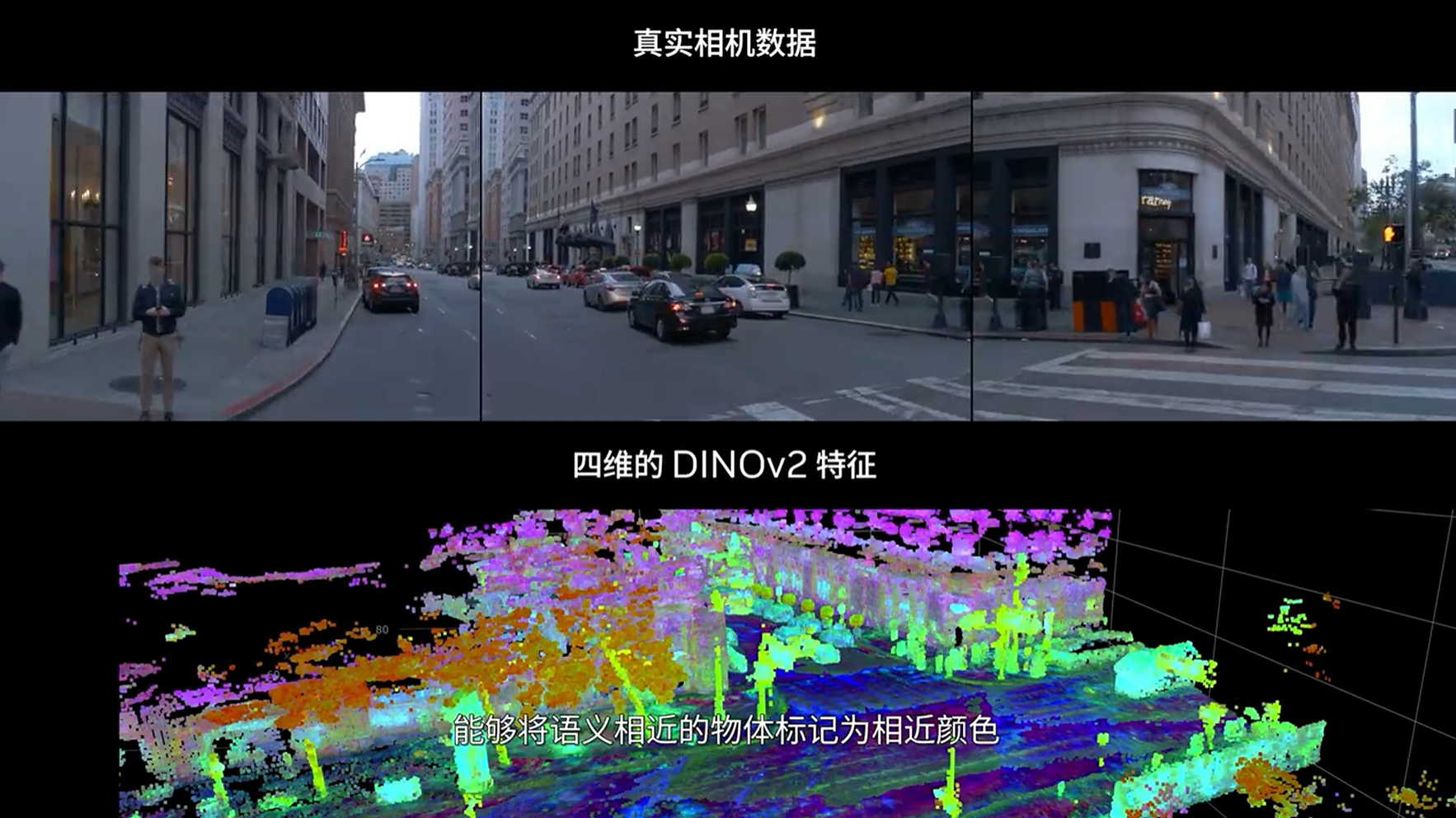
图片源自使用自监督学习大规模重建动态驾驶场景-CSDN直播
LlaDA与EmerNeRF两者的协同作用进一步强化了自动驾驶系统的安全性与适应性:LlamaDA通过EmerNeRF重建的3D场景和语义信息,能更精准地解析环境中的交通标志与规则;而EmerNeRF生成的动态场景数据则为LlamaDA提供了训练与验证的丰富素材。比方说如果在遇到模糊的交通标志或复杂法规冲突时,LlamaDA可结合EmerNeRF的场景重建结果,快速判断并生成多语言安全提示,避免因错误判断结果导致的急刹或者是一些违法行为。这俩技术放在一起不仅降低了真实道路测试的风险,还通过语义与感知的深度结合,推动自动驾驶向更安全、更智能的方向发展。我想这也是NV创建高级辅助驾驶开发者实验室的初衷吧。
Omniverse平台
这个我就不介绍了吧,感觉用NV的做机器人或者做驾驶方向的都用过,小lo一笔带过
我们依旧可以通过Omniverse的3D建模工具,创建并调整道路布局、天气条件、交通参与者行为(如行人突然横穿马路)甚至也可以搞个极端环境的仿真进行极端测试。
好了,本期简单了解了NVIDIA高级辅助驾驶开发者实验室以及相关技术或NV的最新进展
不得不说,老黄这波对于驾驶的安全是下足了功夫。正如黄仁勋在安全报告中所说:“安全性是高级辅助驾驶的首要考量。”而NVIDIA的实验室,正是这句话的最好注脚——它让AI汽车不再是冰冷的机器,而是人类智慧与安全的结晶!
相关连接
Explore Automotive Industries | Try NVIDIA NIM APIs加速高级辅助驾驶汽车开发,NVIDIA推理微服务(NIMTM)
NVIDIA白皮书:自动驾驶安全报告:
https://img-bss.csdnimg.cn/bss/NVIDIA/auto-self-driving-safety-report-ZH%20%28Mar%20updated%29.pdf
最后附上个老黄的卡通
