使用手机录制rosbag包
文章目录
- 简介
- 录制工具
- 录制步骤
- 录制设置
- 设置IMU录制频率
- 设置相机分辨率
- 拍照模式
- 录制模式
- 数据制作
- 获取数据
- 数据转为rosbag
- 查看rosbag
简介
ROS数据包(rosbag)是ROS系统中用于记录和回放传感器数据的重要工具,通常用于算法调试、系统测试和数据采集。传统上,rosbag依赖于ROS环境下的传感器(如激光雷达、摄像头、IMU等)进行录制,但借助移动设备的强大传感器和灵活的网络通信能力,我们也可以使用手机作为便携式数据采集设备来录制rosbag,利用手机内置的摄像头、IMU(加速度计+陀螺仪)、GPS、麦克风等传感器获取数据。
录制工具
git clone https://gitcode.com/weixin_3858285111/rosbag-apk.git
使用APK包app-fdroid-release.apk,安装在手机上即可;也可参照另一种工具(readme.md)录制。
录制步骤
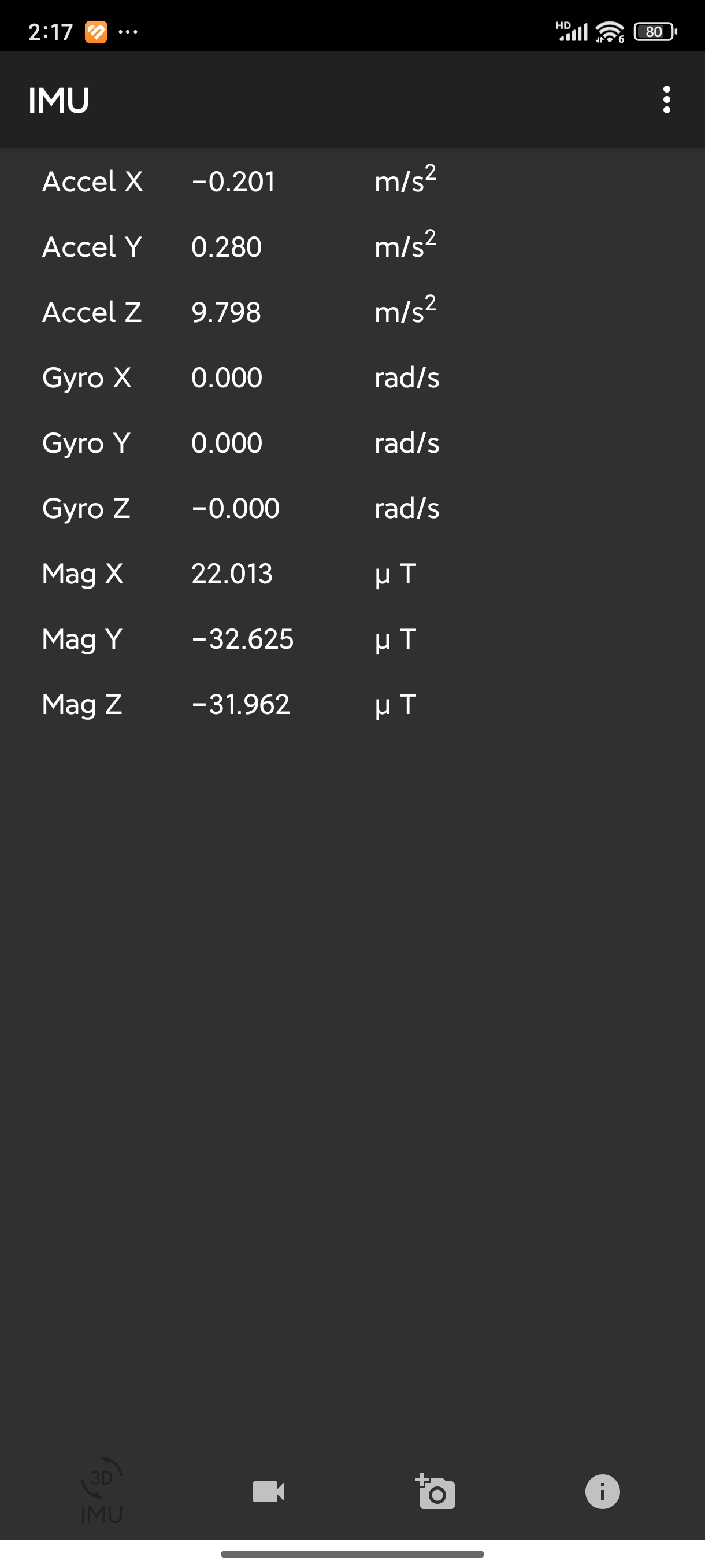
下载APK工具安装到手机上。主页面为手机IMU数据,如图
 </
</