机器学习(神经网络基础篇)——个人理解篇6(概念+代码)
1 在声明一个类中,构建一个属于类的函数,前面为什要加上“self”?
就像下面这一串代码:
class TwoLayerNet:def __init__(self, input_size, hidden_size, output_size,weight_init_std=0.01):#
初始化权重self.params = {}self.params['W1'] = weight_init_std * \np.random.randn(input_size, hidden_size)self.params['b1'] = np.zeros(hidden_size)self.params['W2'] = weight_init_std * \np.random.randn(hidden_size, output_size)self.params['b2'] = np.zeros(output_size)def predict(self, x):W1, W2 = self.params['W1'], self.params['W2']b1, b2 = self.params['b1'], self.params['b2']a1 = np.dot(x, W1) + b1z1 = sigmoid(a1)a2 = np.dot(z1, W2) + b2y = softmax(a2)return y解释:
在Python中,self 是一个指向当前类实例自身的引用参数,它的作用类似于“我”或“这个对象”。它的存在是为了让类的方法(函数)能够访问和操作这个实例的属性(变量)和其他方法。
专业解释:
1 访问实例属性
在 predict 方法中,你需要访问当前实例的权重参数 self.params['W1']、self.params['b1'] 等。没有 self,方法就不知道去哪里找这些参数。
2 区分不同实例
如果有多个神经网络实例(比如 net1 和 net2),它们的权重参数是独立的。通过 self,每个实例的方法只会操作自己的参数,不会互相干扰。
通俗解释:
想象你有一个机器人(类 TwoLayerNet),它身上有多个按钮(属性如 params)和功能(方法如 predict)。当你按下某个功能按钮时,机器人需要知道:“这个功能是针对 我自身 的哪些属性操作的?”这时 self 就是告诉机器人:“操作的是当前这个机器人自己的按钮,而不是其他机器人的。”
总结:self 是类方法的“自我标识符”,让方法知道应该操作哪个实例的数据。没有它,类的方法就无法区分不同实例的属性。
2 神经网络中的参数优化,你知道哪些?有什么优缺点?(纯个人总结)
所谓优化,实质上是找使得损失函数的值最小的一组参数。举一个生活中的例子:
2.1 用调热水澡水温类比神经网络参数优化
想象你正在调整淋浴的冷热水龙头,目标是找到 最舒适的水温。这个过程与神经网络的参数优化惊人地相似:
1. 初始状态(参数初始化)
- 场景:第一次打开淋浴,随机拧动冷热龙头(初始权重和偏置随机设置)。
- 结果:水温要么太冷(预测错误),要么太烫(损失函数值大)。
2. 试水温(前向传播)
- 动作:伸手试水温,感受冷热程度。
- 对应:
- 输入数据 = 当前冷热水比例(参数)
- 输出结果 = 实际水温(预测值)
- 目标 = 理想水温(标签)
- 误差 = 水温偏差(损失函数值)
3. 调整龙头(反向传播与梯度下降)
-
冷热不均(计算梯度):
- 若水太冷 → 需要更多热水(梯度指向增加热水权重的方向)。
- 若水太热 → 需要更多冷水(梯度指向减少热水权重的方向)。
- 调整幅度 = 手拧龙头的力度(学习率)。
-
具体操作:
- 微调热水龙头开大一点(参数更新公式:
W = W - 学习率 × 梯度)。 - 下次再试水温(下一轮训练)。
- 微调热水龙头开大一点(参数更新公式:
4. 反复调试(迭代优化)
- 过程:
太冷 → 加热水 → 试水 → 太烫 → 减热水 → 试水 → 接近舒适 → 微调... - 对应:
通过多次迭代(epoch),参数(冷热水比例)逐渐收敛到最佳值(损失函数最小化)。
5. 成功(模型收敛)
- 结果:水温稳定在理想温度(模型准确预测)。
- 关键因素:
- 学习率:手拧龙头的幅度太大(学习率高)→ 水温反复震荡;幅度太小(学习率低)→ 调整过慢。
- 耐心(迭代次数):足够多的调试次数才能找到平衡点。
2.2 SGD(随机下降)介绍
1 核心公式:
这里把需要更新的权重参数记为W,把损失函数关于W的梯度记为![]() 。 η表示学习率,实际上会取0.01或0.001这些事先决定好的值。上式中的←表示用右边的值更新左边的值。(可以理解为朝向梯度下降的方向前进)
。 η表示学习率,实际上会取0.01或0.001这些事先决定好的值。上式中的←表示用右边的值更新左边的值。(可以理解为朝向梯度下降的方向前进)
2 SGD缺点:
首先来求 的最值问题。
的最值问题。
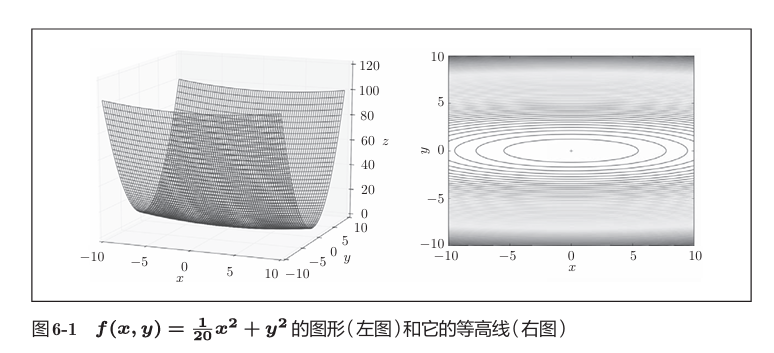
左图表示的函数是向x轴方向延伸的“碗”状函数。 右图是等高线呈向x轴方向延伸的椭圆状。
此函数对应的梯度如下图:
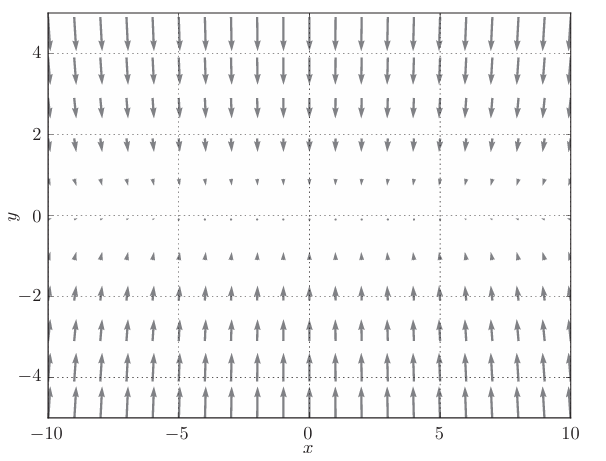
这个梯度的特征是,y轴方向上大,x轴方向上小。换句话说, 就是y轴方向的坡度大,而x轴方向的坡度小。假设从(x , y )=(-7, 2)处 (初始值)开始搜索,结果如下图所示:
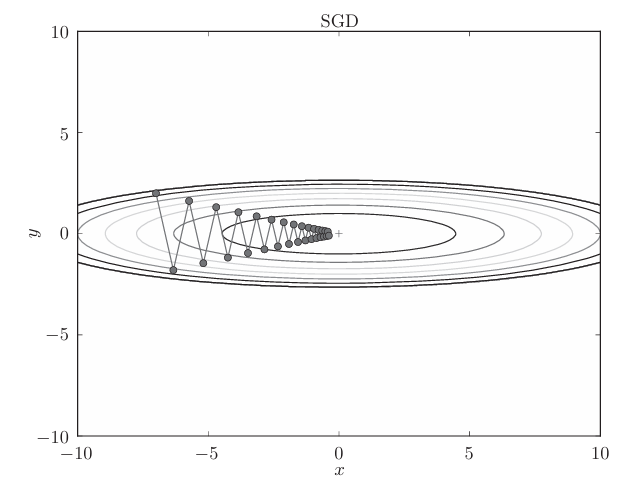
如图,虽然最后能找到“最优点”,但是过程很曲折,,SGD呈“之”字形移动。这是一个相当低效的路径,在Y轴上跨度比较大,但是在水平方向上看,每次平移的:“步伐”总是很小。
为了改正SGD的缺点,下面将介绍Momentum、AdaGrad、Adam这3 种方法来取代SGD。
2.3 Momentum(同SGD相比,引入了阻力下的初始速度)
Momentum是“动量”的意思,和物理有关。
1 我个人的理解:
将二维空间图像的梯度进行正交分解,在梯度跨度大的方向(比如Y轴)对梯度的跨度进行适当的“动态调整”,在梯度跨度小的方向(比如X轴)对梯度的跨度施加外力作用,“迫使”梯度跨度逐渐增加。
2 核心公式:
和前面的SGD一样,W表示要更新的权重参数,![]() 表示损失函数关 于W的梯度,η表示学习率。这里新出现了一个变量v,对应物理上的速度。
表示损失函数关 于W的梯度,η表示学习率。这里新出现了一个变量v,对应物理上的速度。
例如下图:

αv这一项,在物体不受任何力时,该项承担使物体逐渐减 速的任务(α设定为0.9之类的值),对应物理上的地面摩擦或空气阻力。
class Momentum:def __init__(self, lr , moment):self.lr = lrself.moment = momentself.v = Nonedef update (self, para , grad):if self.v is None:self.v = {}for key , val in para.items():self.v[key] = np.zeros_like(val)for key in para.keys():para[key] = self.moment * self.v[key] - self.lr - grad[key]para[key] =+ self.v[key]
实例变量v会保存物体的速度。初始化时,v中什么都不保存,但当第 一次调用update()时,v会以字典型变量的形式保存与参数结构相同的数据。
假设采用Momentum解决函数最优化的问题,相应的 优化路径如下:
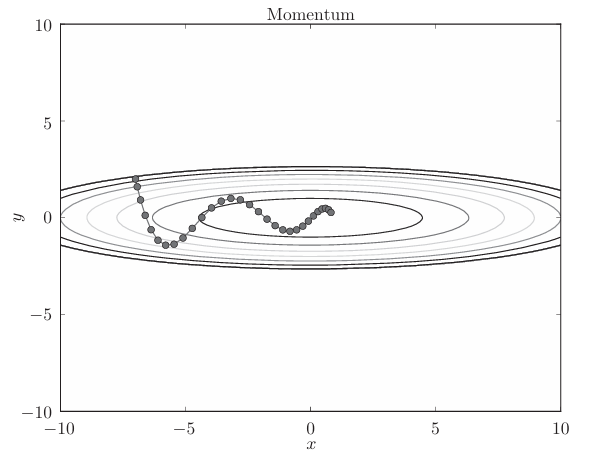
和SGD相比,我们发现 “之”字形的“程度”减轻了。这是因为虽然x轴方向上受到的力非常小,但 是一直在同一方向上受力,所以朝同一个方向会有一定的加速。反过来,虽 然y轴方向上受到的力很大,但是因为交互地受到正方向和反方向的力,它 们会互相抵消,所以y轴方向上的速度不稳定。因此,和SGD时的情形相比, 可以更快地朝x轴方向靠近,减弱“之”字形的变动程度。
2.4 AdaGrad
在神经网络的学习中,学习率(数学式中记为η)的值很重要。学习率过小, 会导致学习花费过多时间;反过来,学习率过大,则会导致学习发散而不能 正确进行。
有一种被称为学习率衰减(learning rate decay)的方法,即随着学习的进行,使学习率逐渐减小。
AdaGrad会为参数的每个元素适当地调整学习率。
1 核心公式:
和前面的SGD一样,W表示要更新的权重参数,![]() 表示损失函数关 于W的梯度,η表示学习率。这里新出现了变量h,它保 存了以前的所有梯度值的平方和(
表示损失函数关 于W的梯度,η表示学习率。这里新出现了变量h,它保 存了以前的所有梯度值的平方和(![]() 表示对应矩阵元素的乘法)。 然后,在更新参数时,通过乘以
表示对应矩阵元素的乘法)。 然后,在更新参数时,通过乘以![]() ,就可以调整学习的尺度。这意味着, 参数的元素中变动较大(被大幅更新)的元素的学习率将变小。也就是说, 可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
,就可以调整学习的尺度。这意味着, 参数的元素中变动较大(被大幅更新)的元素的学习率将变小。也就是说, 可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
AdaGrad代码实现过程:
class AdaGrad:def __init_(self, lr = 0.01):self.lr = lrself.h = Nonedef update(self, para, grad):if self.h is None:self.h = {}for key, val in para.items():self.h[key] = np.zeros_like(val)for key in para.keys():self.h[key] += grad[key] * grad[key]para[key] -= self.lr * grad[key] / (np.sqrt(self.h[key]) + 1e-7)
假设采用AdaGrad解决函数最优化的问题,相应的 优化路径如下:
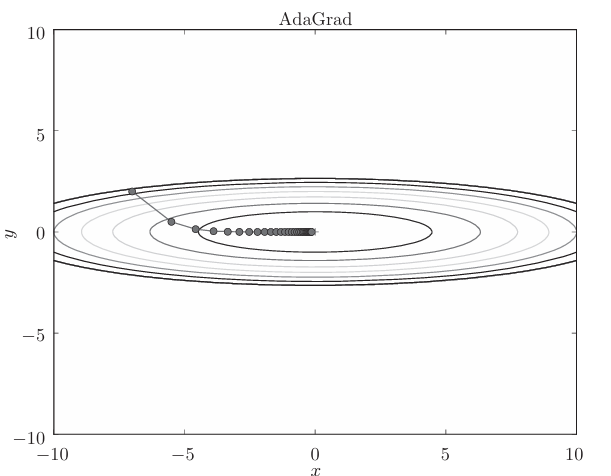
函数的取值高效地向着最小值移动。由于y轴方 向上的梯度较大,因此刚开始变动较大,但是后面会根据这个较大的变动按 比例进行调整,减小更新的步伐。因此,y轴方向上的更新程度被减弱,“之” 字形的变动程度有所衰减.