AMP混合精度训练 详细解析
为什么需要 AMP混合精度训练?
PyTorch 1.6版本今天发布了,带来的最大更新就是自动混合精度。release说明的标题是:
Stable release of automatic mixed precision (AMP).New Beta features include a TensorPipe backend for RPC, memory profiler, and several improvements to distributed training for both RPC and DDP.
可见自动混合精度正是PyTorch 1.6的最大更新。这就带来了几个问题:
- 什么是自动混合精度训练?
- 为什么需要自动混合精度?
- 如何在PyTorch中使用自动混合精度?
一、什么是自动混合精度训练(AMP)
>>> import torch
>>> gemfield = torch.zeros(70,30)
>>> gemfield.type() 'torch.FloatTensor'
>>> syszux = torch.Tensor([1,2])
>>> syszux.type() 'torch.FloatTensor'
我们知道神经网络框架的计算核心是Tensor,也就是那个从scaler -> array -> matrix -> tensor 维度一路丰富过来的tensor。在PyTorch中,我们可以这样创建一个Tensor:
可以看到默认创建的tensor都是FloatTensor类型。而在PyTorch中,一共有10种类型的tensor: - torch.FloatTensor (32-bit floating point)
- torch.DoubleTensor (64-bit floating point)
- torch.HalfTensor (16-bit floating point 1)
- torch.BFloat16Tensor (16-bit floating point 2)
- torch.ByteTensor (8-bit integer (unsigned))
- torch.CharTensor (8-bit integer (signed))
- torch.ShortTensor (16-bit integer (signed))
- torch.IntTensor (32-bit integer (signed))
- torch.LongTensor (64-bit integer (signed))
- torch.BoolTensor (Boolean)
由此可见,默认的Tensor是32-bit floating point,这就是32位浮点型精度的Tensor。
from torch.cuda.amp import autocast as autocast
自动混合精度的关键词有两个:自动、混合精度。这是由PyTorch 1.6的torch.cuda.amp模块带来的:
混合精度预示着有不止一种精度的Tensor,那在PyTorch的AMP模块里是几种呢?2种:torch.FloatTensor和
torch.HalfTensor;
自动预示着Tensor的dtype类型会自动变化,也就是框架按需自动调整tensor的dtype(其实不是完全自动,有些 地方还是需要手工干预);
torch.cuda.amp 的名字意味着这个功能只能在cuda上使用,事实上,这个功能正是NVIDIA的开发人员贡献到PyTorch项目中的。而只有支持Tensor core的CUDA硬件才能享受到AMP的好处(比如2080ti显卡)。Tensor Core是一种矩阵乘累加的计算单元,每个Tensor Core每个时钟执行64个浮点混合精度操作(FP16矩阵相乘和FP32累加),英伟达宣称使用Tensor Core进行矩阵运算可以轻易的提速,同时降低一半的显存访问和存储。
因此,在PyTorch中,当我们提到自动混合精度训练,我们说的就是在NVIDIA的支持Tensor core的CUDA设备上使用torch.cuda.amp.autocast (以及torch.cuda.amp.GradScaler)来进行训练。咦?为什么还要有torch.cuda.amp.GradScaler?
二、为什么需要自动混合精度?
这个问题其实暗含着这样的意思:为什么需要自动混合精度,也就是torch.FloatTensor和torch.HalfTensor的混 合,而不全是torch.FloatTensor?或者全是torch.HalfTensor?
如果非要以这种方式问,那么答案只能是,在某些上下文中torch.FloatTensor有优势,在某些上下文中torch.HalfTensor有优势呗。答案进一步可以转化为,相比于之前的默认的torch.FloatTensor,torch.HalfTensor 有时具有优势,有时劣势不可忽视。
torch.HalfTensor的优势就是存储小、计算快、更好的利用CUDA设备的Tensor Core。因此训练的时候可以减少显存的占用(可以增加batchsize了),同时训练速度更快;
torch.HalfTensor的劣势就是:数值范围小(更容易Overflow / Underflow)、舍入误差(Rounding Error,导致一些微小的梯度信息达不到16bit精度的最低分辨率,从而丢失)。
可见,当有优势的时候就用torch.HalfTensor,而为了消除torch.HalfTensor的劣势,我们带来了两种解决方案:
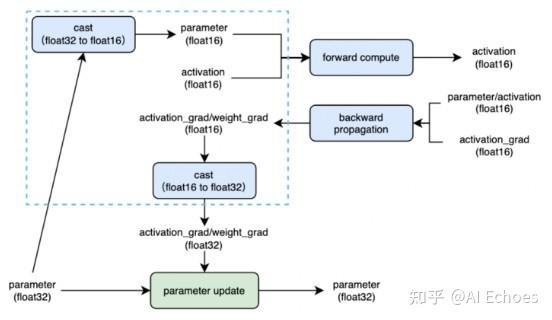
- 梯度scale,这正是上一小节中提到的torch.cuda.amp.GradScaler,通过放大loss的值来防止梯度的underflow(这只是BP的时候传递梯度信息使用,真正更新权重的时候还是要把放大的梯度再unscale回 去);
- matmul
addbmm
addmm
addmv
addr
baddbmm
bmm
chain_matmul
conv1d
conv2d
conv3d
conv_transpose1d
conv_transpose2d
conv_transpose3d
linear
matmul
mm
mv
prelu
回落到torch.FloatTensor,这就是混合一词的由来。那怎么知道什么时候用torch.FloatTensor,什么时候用半 精度浮点型呢?这是PyTorch框架决定的,在PyTorch 1.6的AMP上下文中,如下操作中tensor会被自动转化为半精度浮点型的torch.HalfTensor:
三、混合精度训练的优点是什么?
- 减少显存
- 占用加快训练速度:通信量
- 减半;计算性能翻倍。
四、混合精度训练的缺点是什么? - 数据溢出
- 舍入误差
五、混合精度训练的关键技术是什么? - float32主权重备份
- 动态损失缩放
六、介绍一下 混合精度训练 动态损失缩放? - 介绍:即损失标度。这会将梯度也放大1024倍,大大降只需要将损失乘以某个大数字 (如1024),低了梯度发生下溢的几率。计算出梯度后,只需将其除以1024就可以得到准确值。
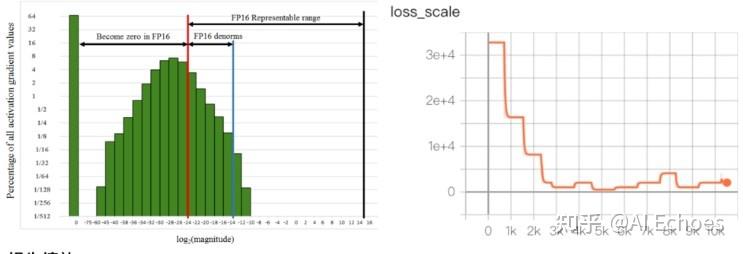
动态选择损失标度 介绍:发生溢出,跳过优化器更新,损失标度减半;连续N个steps没有发生溢出,损失标度翻倍
七、如何在PyTorch中使用自动混合精度?
答案就是autocast + GradScaler。
1. autocast
正如前文所说,需要使用torch.cuda.amp模块中的autocast 类。使用也是非常简单的:
from torch.cuda.amp import autocast as autocast
# 创建model,默认是torch.FloatTensor model = Net().cuda()
optimizer = optim.SGD(model.parameters(),)
可以使用autocast的context managers语义(如上所示),也可以使用decorators语义。 当进入autocast的上下文后,上面列出来的那些CUDA ops 会把tensor的dtype转换为半精度浮点型,从而在不损失训练精度的情况下加快运算。刚进入autocast的上下文时,tensor可以是任何类型,你不要在model或者input上手工调用.half() ,框架会自动做,这也是自动混合精度中“自动”一词的由来。
另外一点就是,autocast上下文应该只包含网络的前向过程(包括loss的计算),而不要包含反向传播,因为BP 的op会使用和前向op相同的类型。
Traceback (most recent call last):
......
File "/opt/conda/lib/python3.7/site-packages/torch/nn/modules/module.py", line 722, in _call_impl
result = self.forward(*input, **kwargs)
......
RuntimeError: expected scalar type float but found c10::Half
还有的时候呀,你的代码在autocast上下文中会报如下的错误:
对于RuntimeError: expected scalar type float but found c10::Half,这估计是个bug。你可以在tensor上手工调用.float()来让type匹配。
1. GradScaler
但是别忘了前面提到的梯度scaler模块呀,需要在训练最开始之前实例化一个GradScaler对象。因此PyTorch中 经典的AMP使用方式如下:
from torch.cuda.amp import autocast as autocast
# 创建model,默认是torch.FloatTensor model = Net().cuda()
optimizer = optim.SGD(model.parameters(),)
# 在训练最开始之前实例化一个GradScaler对象scaler = GradScaler()
for epoch in epochs:
for input, target in data:
optimizer.zero_grad()
# 前向过程(model + loss)开启 autocast
with autocast():
scaler的大小在每次迭代中动态的估计,为了尽可能的减少梯度underflow,scaler应该更大;但是如果太大的 话,半精度浮点型的tensor又容易overflow(变成inf或者NaN)。所以动态估计的原理就是在不出现inf或者NaN
梯度值的情况下尽可能的增大scaler的值——在每次scaler.step(optimizer)中,都会检查是否又inf或NaN的梯度出 现:
- 如果出现了inf或者NaN,scaler.step(optimizer)会忽略此次的权重更新(optimizer.step() ),并且将scaler的大小缩小(乘上backoff_factor);
- 如果没有出现inf或者NaN,那么权重正常更新,并且当连续多次(growth_interval指定)没有出现inf或者
NaN,则scaler.update()会将scaler的大小增加(乘上growth_factor)。
八、如何使用 AMP混合精度训练 ?
- AMP混合精度训练 代码
- Trainer 训练类
class Trainer:
...
def train(self, train_loader, dev_loader=None, train_sampler=None):
...
# 设置 AMP混合精度训练
if self.args.use_amp:
scaler = torch.cuda.amp.GradScaler()
if self.args.local_rank == 0:
start = time.time()
for epoch in range(1, self.args.epochs + 1):
train_sampler.set_epoch(epoch)
for step, batch_data in enumerate(train_loader):
self.model.train()
# 使用 AMP混合精度训练
if self.args.use_amp:
with torch.cuda.amp.autocast():
logits, label = self.on_step(batch_data)
loss = self.criterion(logits, label)
torch.distributed.barrier()
scaler.scale(loss).backward()
scaler.step(self.optimizer)
scaler.update() - class Args:
...
local_rank = None
local_world_size = None
device_ids = None
rank = None
dev = False
use_amp = True
Args 参数类 - main_worker 主函数
def main_worker(local_rank, local_world_size):
# =======================================
# 设置参数
...
dist.init_process_group(backend="nccl", init_method="tcp://localhost:12345", world_size=local_world_size, rank=local_rank)
n = torch.cuda.device_count() // local_world_size
device_ids = [local_rank]
print(
f"[{os.getpid()}] rank = {local_rank}, "
+ f"world_size = {local_world_size}, n = {n}, device_ids = {device_ids}
\n", end=''
)
torch.cuda.set_device(local_rank)
args = Args()
args.local_world_size = local_world_size
args.local_rank = local_rank
args.device_ids = device_ids
args.rank = local_rank
tokenizer = BertTokenizer.from_pretrained(args.model_path)
- AMP混合精度训练 完整代码
torch.cuda.manual_seed_all(seed)
def get_data():
with open("data/train.json", "r", encoding="utf-8") as fp:
data = fp.read()
data = json.loads(data)
return data
def load_data():
data = get_data()
return_data = []
# [(文本, 标签id)]
for d in data:
text = d[0]
label = d[1]
return_data.append(("".join(text.split(" ")).strip(), label))
return return_data
class ClsDataset(Dataset):
def init (self, data):
self.data = data
def len (self):
return len(self.data)
def getitem (self, index):
return self.data[index]
class Collate:
def init (self,
tokenizer,
max_seq_len,
):
self.tokenizer = tokenizer
self.max_seq_len = max_seq_len
def collate_fn(self, batch):
input_ids_all = []
token_type_ids_all = []
attention_mask_all = []
label_all = []
for data in batch:
text = data[0]
label = data[1]
inputs = self.tokenizer.encode_plus(text=text,
max_length=self.max_seq_len,
padding="max_length",
truncation="longest_first",
return_attention_mask=True,
return_token_type_ids=True)
input_ids = inputs["input_ids"]
token_type_ids = inputs["token_type_ids"]
attention_mask = inputs["attention_mask"]
input_ids_all.append(input_ids)
token_type_ids_all.append(token_type_ids)
attention_mask_all.append(attention_mask)
label_all.append(label)
input_ids_all = torch.tensor(input_ids_all, dtype=torch.long)
token_type_ids_all = torch.tensor(token_type_ids_all, dtype=torch.long)
attention_mask_all = torch.tensor(attention_mask_all, dtype=torch.long)
label_all = torch.tensor(label_all, dtype=torch.long)
return_data = {
"input_ids": input_ids_all,
"attention_mask": attention_mask_all,
"token_type_ids": token_type_ids_all,
"label": label_all
}
return return_data
def build_optimizer(model, args):
no_decay = ['bias', 'LayerNorm.weight']
optimizer_grouped_parameters = [
{'params': [p for n, p in model.named_parameters() if not any(nd in n for nd in no_decay)],
'weight_decay': args.weight_decay},
{'params': [p for n, p in model.named_parameters() if any(nd in n for nd in no_decay)],
'weight_decay': 0.0}
]
# optimizer = AdamW(model.parameters(), lr=learning_rate)
optimizer = AdamW(optimizer_grouped_parameters, lr=args.learning_rate)
return optimizer
class Trainer:
def init (self,
args,
config,
model,
criterion,
optimizer):
self.args = args
self.config = config,
self.model = model
self.criterion = criterion
self.optimizer = optimizer
def on_step(self, batch_data):
label = batch_data["label"].cuda()
input_ids = batch_data["input_ids"].cuda()
token_type_ids = batch_data["token_type_ids"].cuda()
attention_mask = batch_data["attention_mask"].cuda()
output = self.model(input_ids=input_ids,
token_type_ids=token_type_ids,
attention_mask=attention_mask,
labels=label)
logits = output[1]
return logits, label
def loss_reduce(self, loss):
rt = loss.clone()
dist.all_reduce(rt, op=dist.ReduceOp.SUM)
rt /= self.args.local_world_size
return rt
def output_reduce(self, outputs, targets):
output_gather_list = [torch.zeros_like(outputs) for _ in range(self.args.local_world_size)]
# 把每一个GPU的输出聚合起来
dist.all_gather(output_gather_list, outputs)
outputs = torch.cat(output_gather_list, dim=0)
target_gather_list = [torch.zeros_like(targets) for _ in range(self.args.local_world_size)]
# 把每一个GPU的输出聚合起来
dist.all_gather(target_gather_list, targets)
targets = torch.cat(target_gather_list, dim=0)
return outputs, targets
def train(self, train_loader, dev_loader=None, train_sampler=None):
gloabl_step = 1
best_acc = 0.
if self.args.use_amp:
scaler = torch.cuda.amp.GradScaler()
if self.args.local_rank == 0:
start = time.time()
for epoch in range(1, self.args.epochs + 1):
train_sampler.set_epoch(epoch)
for step, batch_data in enumerate(train_loader):
self.model.train()
if self.args.use_amp:
with torch.cuda.amp.autocast():
logits, label = self.on_step(batch_data)
loss = self.criterion(logits, label)
torch.distributed.barrier()
scaler.scale(loss).backward()
scaler.step(self.optimizer)
scaler.update()
else:
logits, label = self.on_step(batch_data)
loss = self.criterion(logits, label)
torch.distributed.barrier()
loss.backward()
self.optimizer.step()
if self.args.local_rank == 0:
print("【train】 epoch:{}/{} step:{}/{} loss:{:.6f}".format(
epoch, self.args.epochs, gloabl_step, self.args.total_step, loss
))
gloabl_step += 1
if self.args.dev:
if gloabl_step % self.args.eval_step == 0:
loss, accuracy = self.dev(dev_loader)
if self.args.local_rank == 0:
print("【dev】 loss:{:.6f} accuracy:
{:.4f}".format(loss, accuracy))
if accuracy > best_acc:
best_acc = accuracy
print("【best accuracy】 {:.4f}".format(best_acc))
torch.save(self.model.state_dict(), self.args.ckpt_path)
if self.args.local_rank == 0:
end = time.time()
print("耗时:{}分钟".format((end - start) / 60))
if not self.args.dev and self.args.local_rank == 0:
torch.save(self.model.state_dict(), self.args.ckpt_path)
def dev(self, dev_loader):
self.model.eval()
correct_total = 0
num_total = 0
loss_total = 0.
with torch.no_grad():
for step, batch_data in tqdm(enumerate(dev_loader)):
logits, label = self.on_step(batch_data)
loss = self.criterion(logits, label)
torch.distributed.barrier()
loss = self.loss_reduce(loss)
loss_total += loss
logits, label = self.output_reduce(logits, label)
logits = logits.detach().cpu().numpy()
label = label.view(-1).detach().cpu().numpy()
num_total += len(label)
preds = np.argmax(logits, axis=1).flatten()
correct_num = (preds == label).sum()
correct_total += correct_num
return loss_total, correct_total / num_total
def test(self, model, test_loader, labels):
self.model = model
self.model.eval()
preds = []
trues = []
with torch.no_grad():
for step, batch_data in enumerate(test_loader):
logits, label = self.on_step(batch_data)
torch.distributed.barrier()
logits, label = self.output_reduce(logits, label)
label = label.view(-1).detach().cpu().numpy().tolist()
logits = logits.detach().cpu().numpy()
pred = np.argmax(logits, axis=1).flatten().tolist()
trues.extend(label)
preds.extend(pred)
report = classification_report(trues, preds, target_names=labels)
return report
class Args:
model_path = "/mnt/kaimo/data/pretrain/bert-base-chinese"
ckpt_path = "output/multi-gpu-distributed-mp-amp-cls.pt"
max_seq_len = 128
ratio = 0.92
device = torch.device("cuda" if torch.cuda.is_available else "cpu")
train_batch_size = 32
dev_batch_size = 32
weight_decay = 0.01
epochs = 1
learning_rate = 3e-5
eval_step = 50
local_rank = None
local_world_size = None
device_ids = None
rank = None
dev = False
use_amp = True
def main_worker(local_rank, local_world_size):
# =======================================
# 设置参数
set_seed()
label2id = {
"其他": 0,
"喜好": 1,
"悲伤": 2,
"厌恶": 3,
"愤怒": 4,
"高兴": 5,
}
dist.init_process_group(backend="nccl", init_method="tcp://localhost:12345", world_size=local_world_size,
rank=local_rank)
n = torch.cuda.device_count() // local_world_size
device_ids = [local_rank]
print(
f"[{os.getpid()}] rank = {local_rank}, "
+ f"world_size = {local_world_size}, n = {n}, device_ids = {device_ids}
\n", end=''
)
torch.cuda.set_device(local_rank)
args = Args()
args.local_world_size = local_world_size
args.local_rank = local_rank
args.device_ids = device_ids
args.rank = local_rank
tokenizer = BertTokenizer.from_pretrained(args.model_path)
# =======================================
# =======================================
# 加载数据集
data = load_data()
# 取1万条数据出来
data = data[:10000]
random.shuffle(data)
train_num = int(len(data) * args.ratio)
train_data = data[:train_num]
dev_data = data[train_num:]
collate = Collate(tokenizer, args.max_seq_len)
train_dataset = ClsDataset(train_data)
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = DataLoader(train_dataset,
batch_size=args.train_batch_size,
num_workers=2,
collate_fn=collate.collate_fn,
sampler=train_sampler)
total_step = len(train_loader) * args.epochs
args.total_step = total_step
dev_dataset = ClsDataset(dev_data)
dev_sampler = torch.utils.data.distributed.DistributedSampler(dev_dataset)
dev_loader = DataLoader(dev_dataset,
batch_size=args.dev_batch_size,
shuffle=False,
num_workers=2,
collate_fn=collate.collate_fn,
sampler=dev_sampler)
test_loader = dev_loader
# =======================================
# =======================================
# 定义模型、优化器、损失函数
config = BertConfig.from_pretrained(args.model_path, num_labels=6)
model = BertForSequenceClassification.from_pretrained(args.model_path,
config=config)
# 第三步:封装模型
model.cuda()
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=args.device_ids)
criterion = torch.nn.CrossEntropyLoss()
optimizer = build_optimizer(model, args)
# =======================================
# =======================================
# 定义训练器,进行训练、验证和测试
trainer = Trainer(args,
config,
model,
criterion,
optimizer)
trainer.train(train_loader, dev_loader, train_sampler)
labels = list(label2id.keys())
config = BertConfig.from_pretrained(args.model_path, num_labels=6)