基础的贝叶斯神经网络(BNN)回归
下面是一个最基础的贝叶斯神经网络(BNN)回归示例,采用PyTorch实现,适合入门理解。
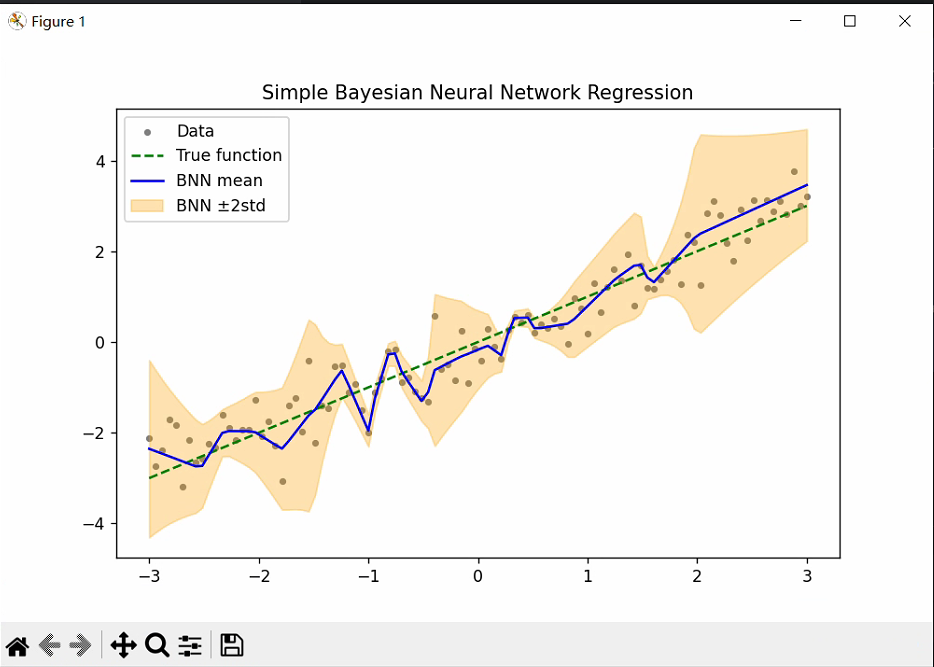
这个例子用BNN拟合 y = x + 噪声 的一维回归问题,输出均值和不确定性(方差)。
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt# 1. 生成数据
np.random.seed(0)
x = np.linspace(-3, 3, 100)
y = x + np.random.normal(0, 0.5, size=x.shape)# 转为torch tensor
x_train = torch.tensor(x, dtype=torch.float32).unsqueeze(1)
y_train = torch.tensor(y, dtype=torch.float32).unsqueeze(1)# 2. 定义贝叶斯回归网络(输出均值和log方差)
class BayesianRegressor(nn.Module):def __init__(self):super().__init__()self.net = nn.Sequential(nn.Linear(1, 32), nn.ReLU(),nn.Linear(32, 32), nn.ReLU(),nn.Linear(32, 2) # 输出均值和log方差)def forward(self, x):out = self.net(x)mean = out[:, 0:1]logvar = out[:, 1:2]return mean, logvar# 3. 贝叶斯损失函数(负对数似然)
def bayesian_loss(mean, logvar, target):# 对应N(y|mean, exp(logvar))return (0.5 * torch.exp(-logvar) * (target - mean) ** 2 + 0.5 * logvar).mean()# 4. 训练网络
model = BayesianRegressor()
optimizer = optim.Adam(model.parameters(), lr=0.01)for epoch in range(2000):mean, logvar = model(x_train)loss = bayesian_loss(mean, logvar, y_train)optimizer.zero_grad()loss.backward()optimizer.step()if (epoch+1) % 200 == 0:print(f"Epoch {epoch+1}, Loss: {loss.item():.4f}")# 5. 预测与可视化
x_test = torch.linspace(-3, 3, 100).unsqueeze(1)
mean_pred, logvar_pred = model(x_test)
mean_pred = mean_pred.detach().numpy().flatten()
std_pred = torch.exp(0.5 * logvar_pred).detach().numpy().flatten()plt.figure(figsize=(8, 5))
plt.scatter(x, y, label='Data', color='gray', s=10)
plt.plot(x, x, 'g--', label='True function')
plt.plot(x_test, mean_pred, 'b-', label='BNN mean')
plt.fill_between(x_test.flatten(), mean_pred-2*std_pred, mean_pred+2*std_pred, color='orange', alpha=0.3, label='BNN ±2std')
plt.legend()
plt.title("Simple Bayesian Neural Network Regression")
plt.show()