机器人抓取位姿检测——GRCN训练及测试教程(Pytorch)
这篇文章主要介绍了2020年IROS提出的一种名为GRCN的检测模型,给出了代码各部分的说明,并给出windows系统下可以直接复现的完整代码,包含Cornell数据集。
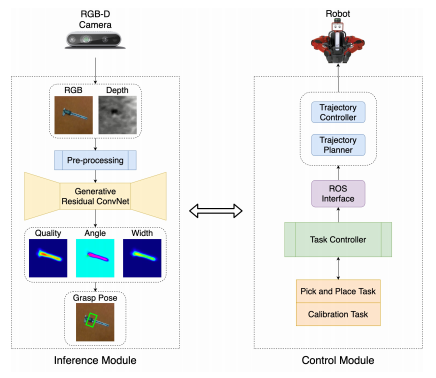
模型结构图
github源码地址:https://github.com/skumra/robotic-grasping
完整代码地址:https://download.csdn.net/download/hsdujdjrjrj/90698765
Cornell数据集地址:https://aistudio.baidu.com/datasetdetail/3297