GPIO _OUTPUT-NORMAL 模式
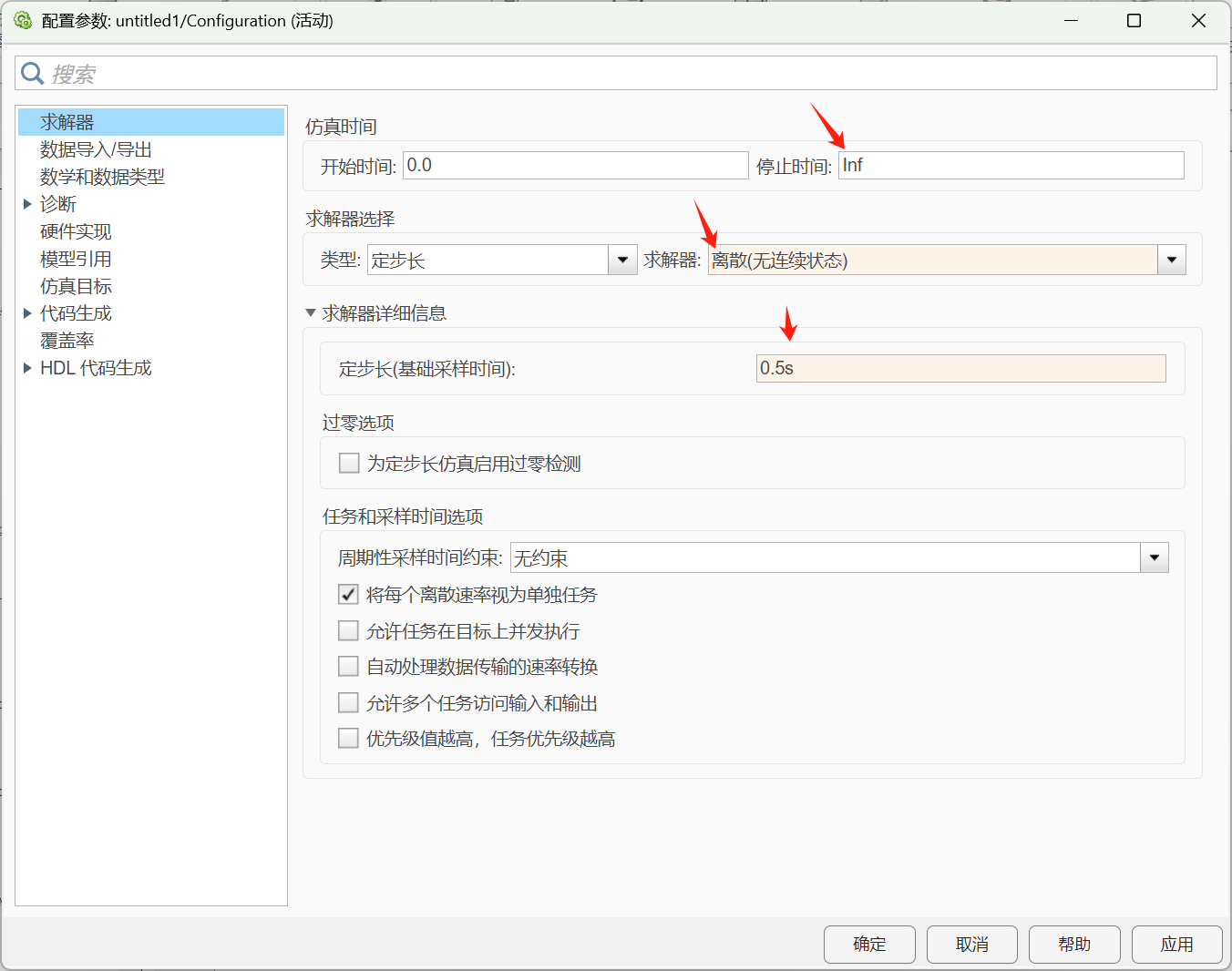
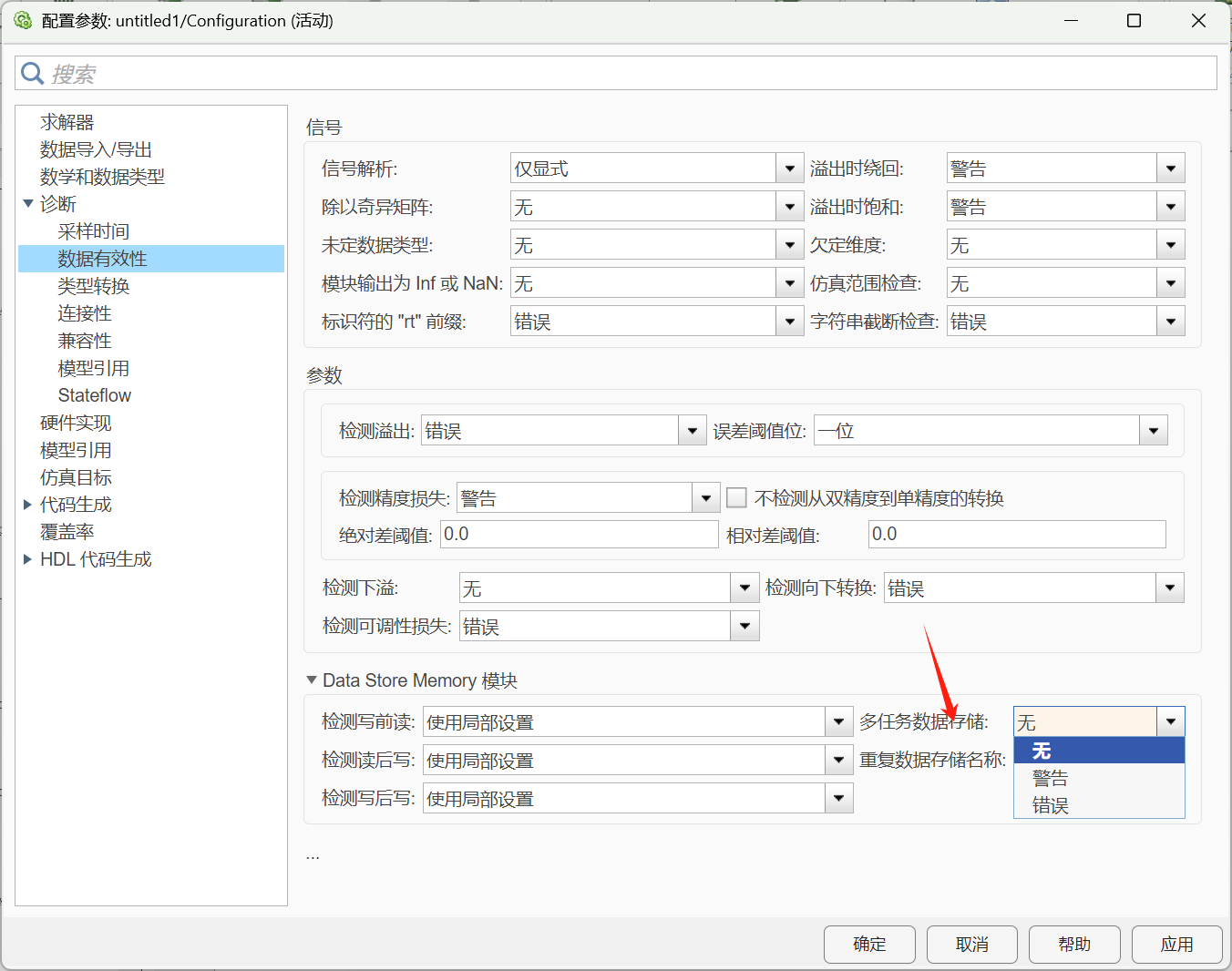
打开 Simulink 的模型配置界面,首先配置 Solver 选项卡,设置 Stop Time 为 inf 。 Slover options 为定步长离散解算器,也就是选择 Fixed-Step ,并选择 discrete。定步长设置为 0.5 秒。在 Diagonostics 选项卡中的 Data Validity 选项中,将 Multitask data store 配 置为 none 。
!!!编译之后报错
错误:计算在模块图 'untitled1' 的 "配置参数" 对话框中指定的 'FixedStep' 的表达式 '0.5s' 时出错。
原因:
无效表达式。请检查缺失的乘法运算符、缺失或不对称的分隔符或者其他语法错误。要构造矩阵,请使用方括号而不是圆括号。
原因:
无效表达式。请检查缺失的乘法运算符、缺失或不对称的分隔符或者其他语法错误。要构造矩阵,请使用方括号而不是圆括号。
注意 定步长设置为 0.5 秒,不能带s,只需输入数字0.5

在 Diagonostics 选项卡中的 Data Validity 选项中,将 Multitask data store 配 置为 none 。
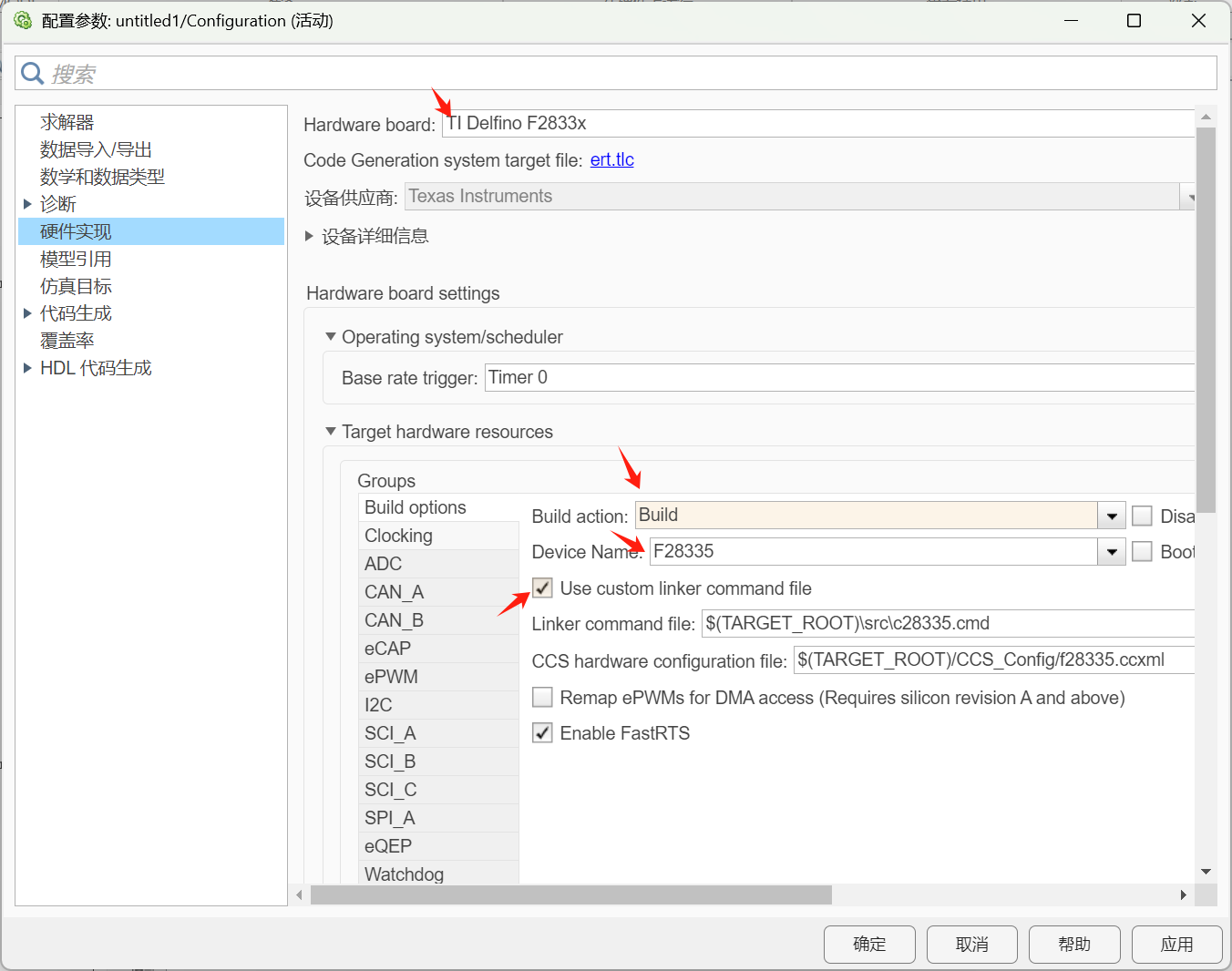
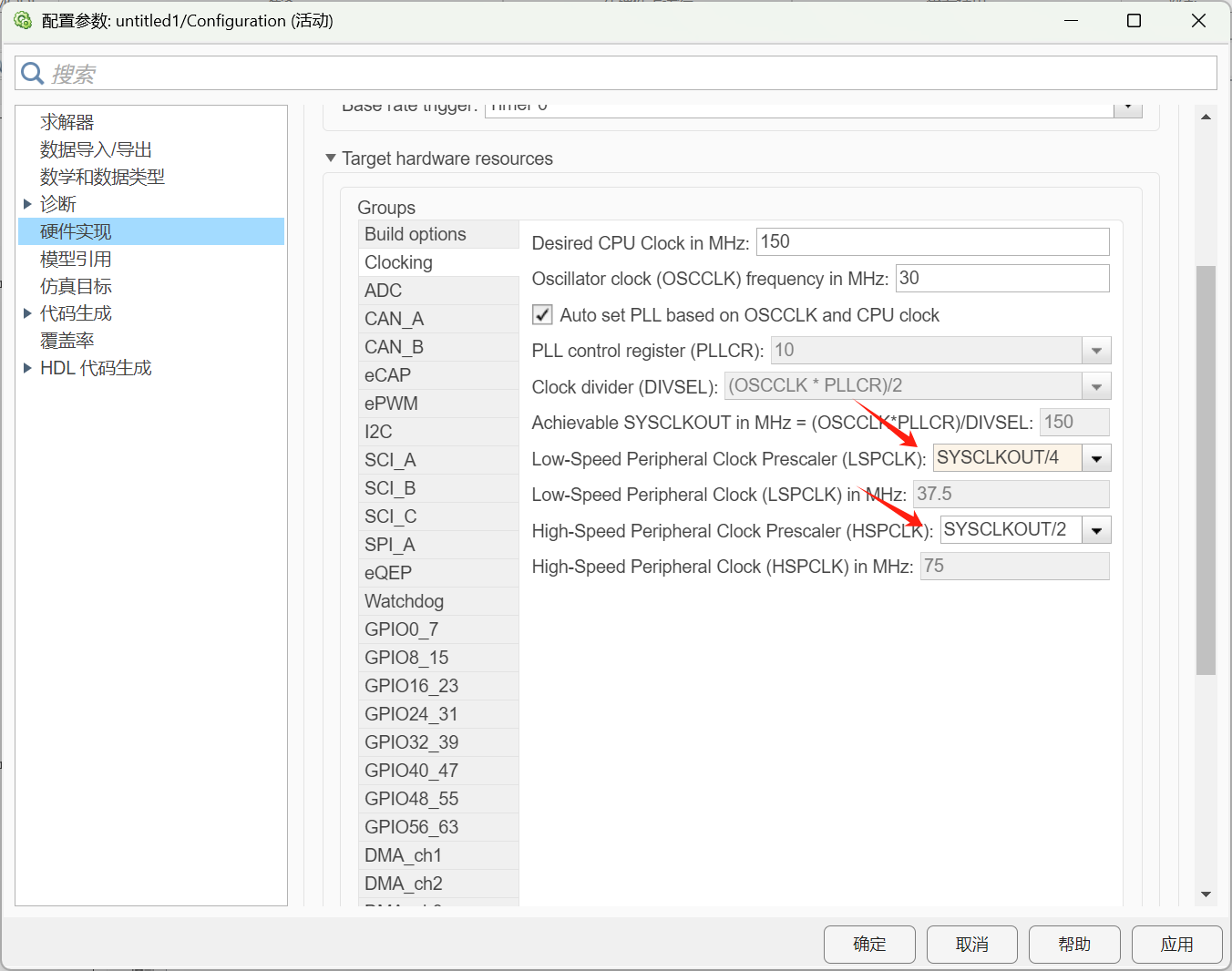
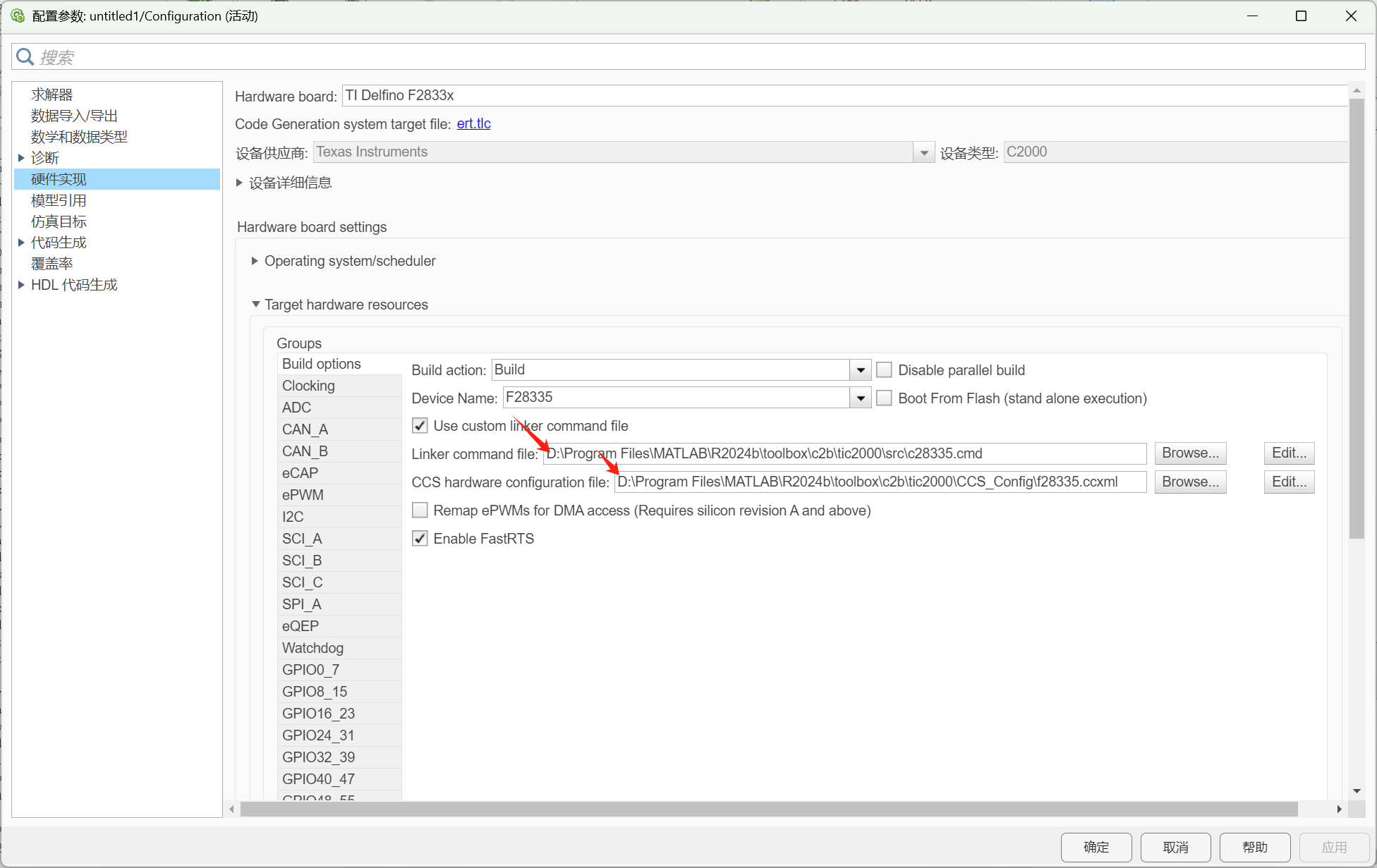
在 Hardware Implementation 中 选 择 Hardware board 为 TI Defino F2833x(boot from flash),这时 simulink 会自动选定 TI c2000 系列。然后配置该 界面下 build action 为 build 。 Device name 为 F28335 。并勾选 Use custom linker command。然后在 Clocking 选项中,外部晶振为 30M ,将系统时钟配置为 150MHz,高速外设时钟 2 分频,低速时钟外设 4 分频。其他外设模块按自己需
要配置。
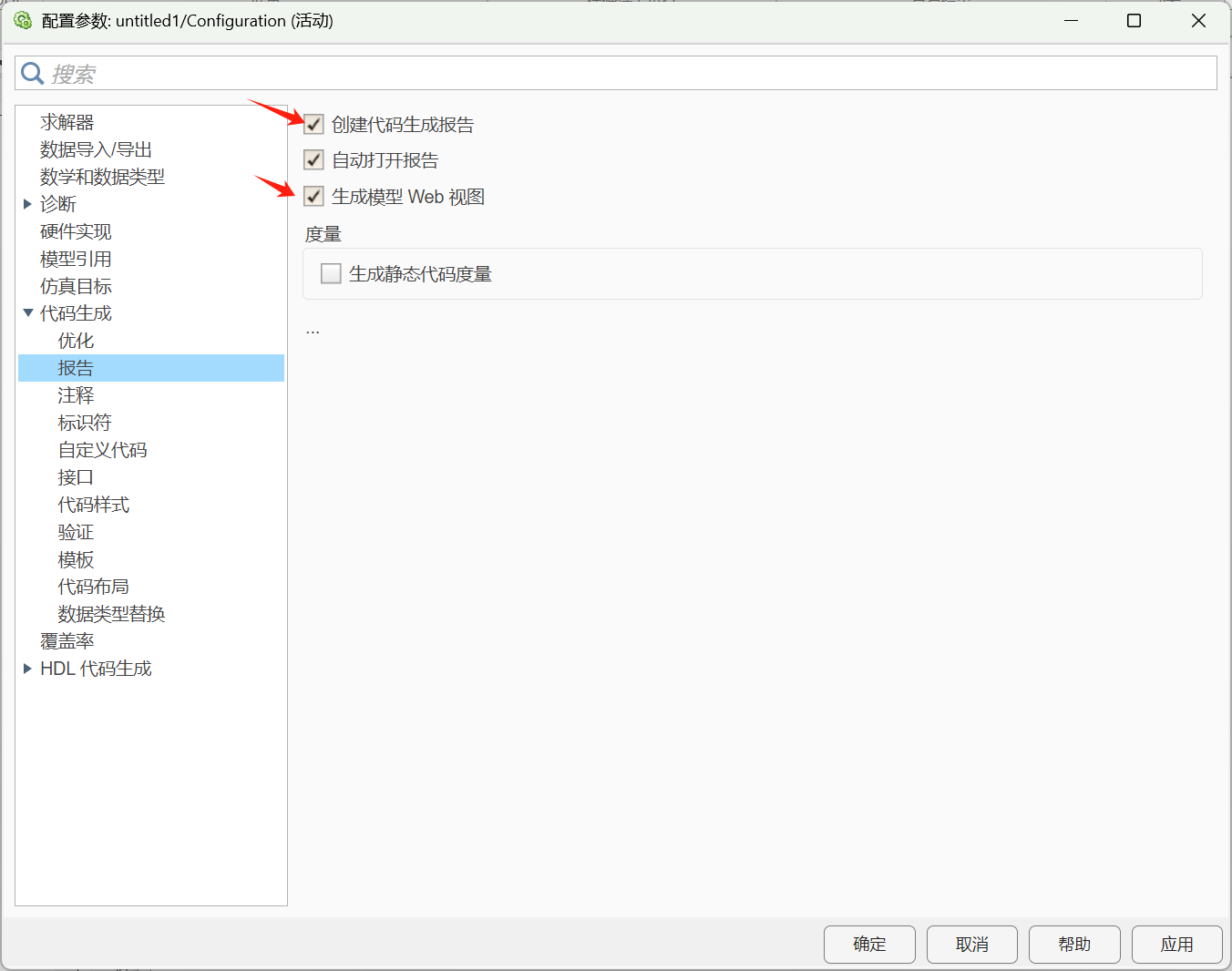
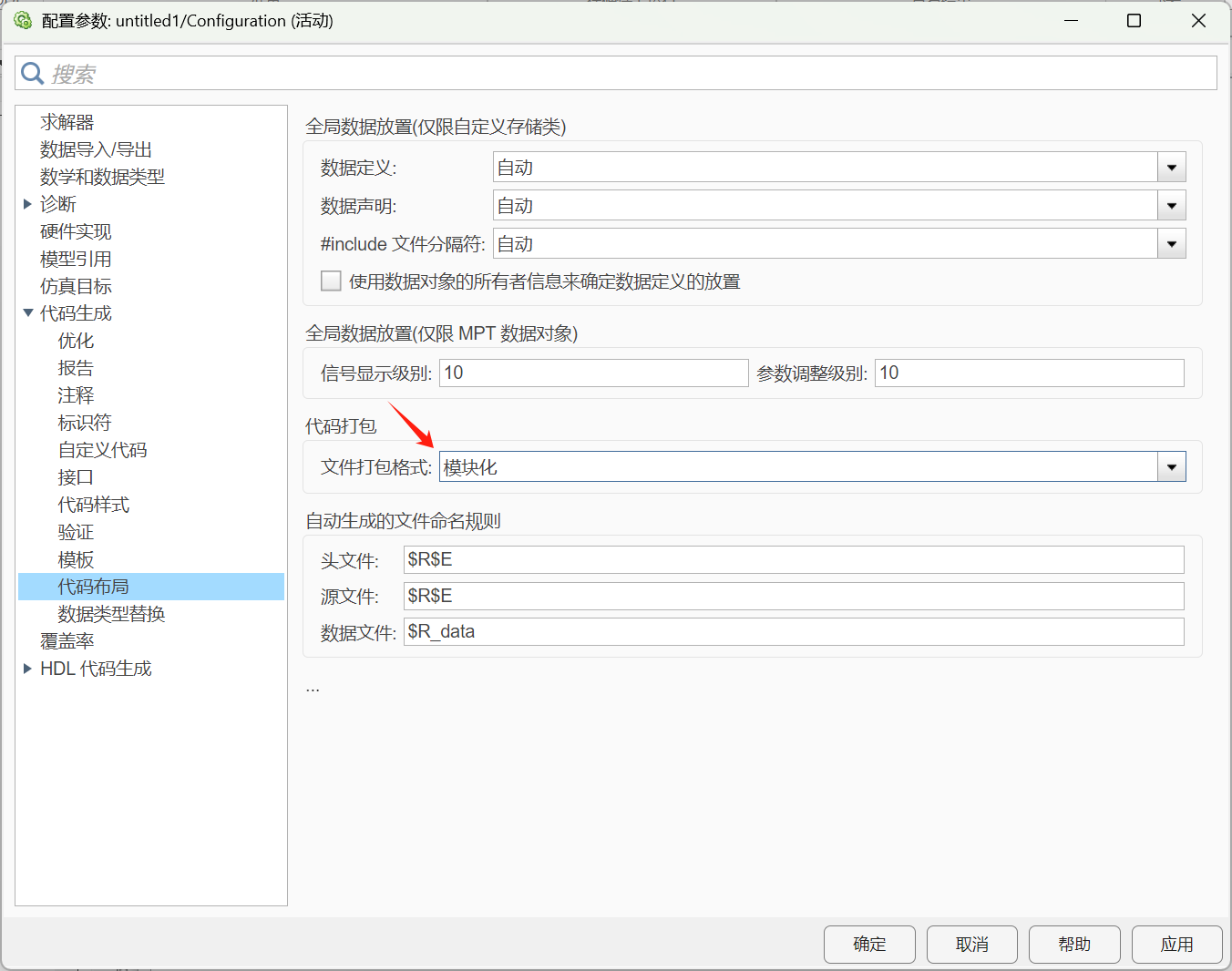
Code generation 选项卡中使用的 Toolchain 为 CCSv6 。在 Code generation objectives 的 Prioritized objectives 中将执行效率、 ROM 效率、 RAM 效率设置为 优先的代码生成目标。在 report 中勾选 Generate model web view 使生成的代码 可以进行模型与代码之间相互的跟踪。在 Code Placement 中配置 Code Packaging 为 Modular 。
这是生成ccs工程必须选择的前提,注意配置好路径
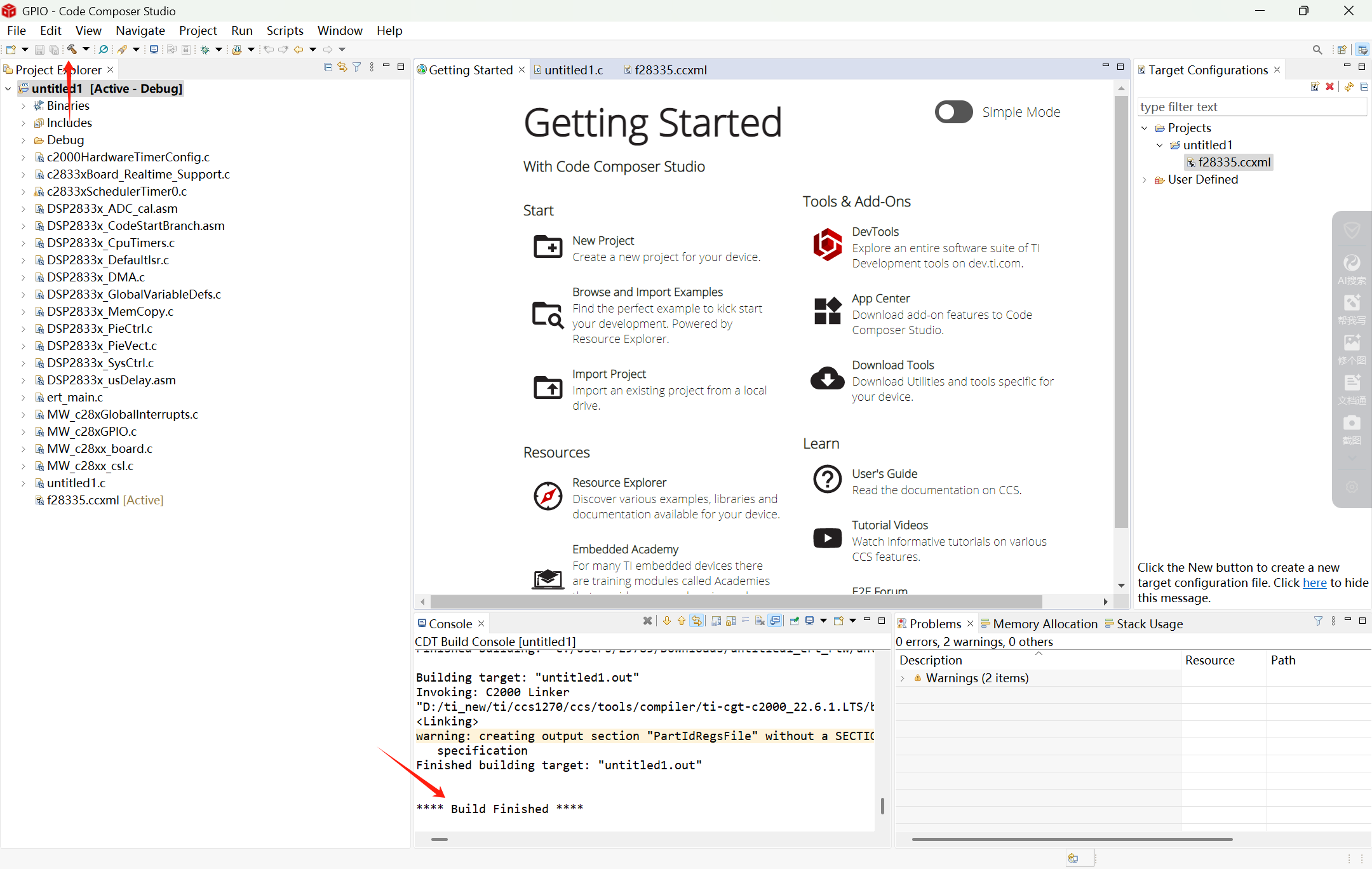
编译成功之后弹出代码生成报告,复制路径在ccs软件打开
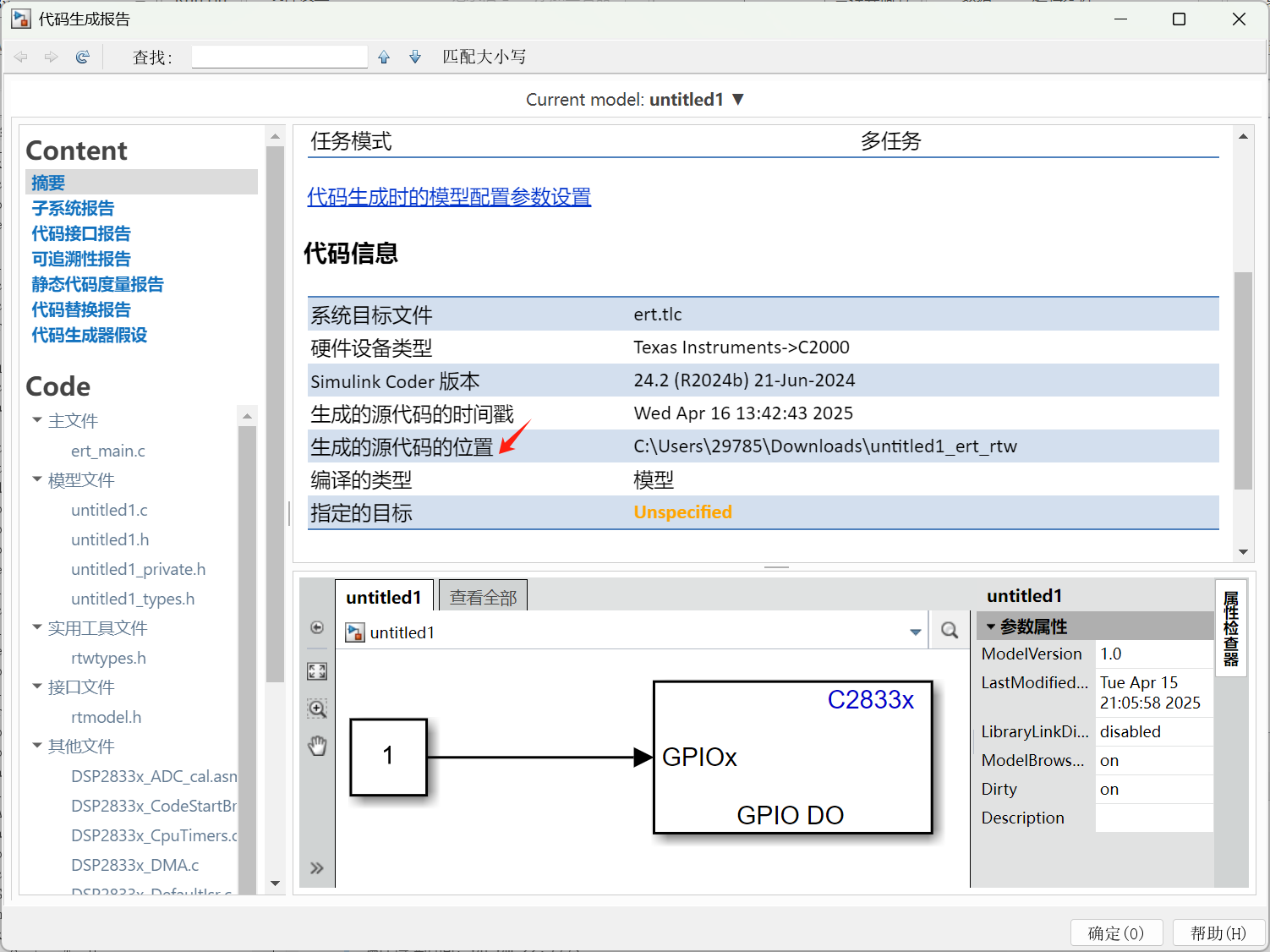
以下是CCS文件的配置
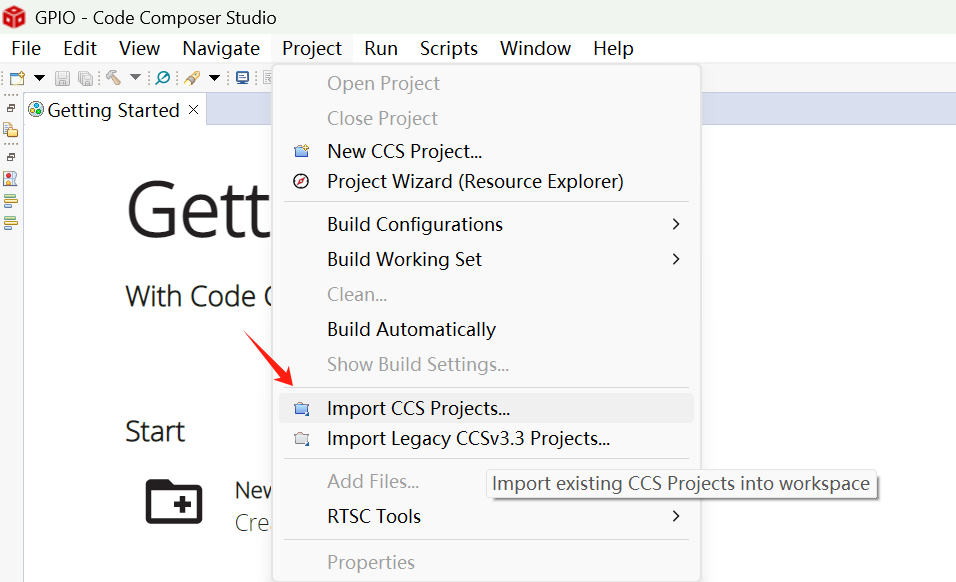
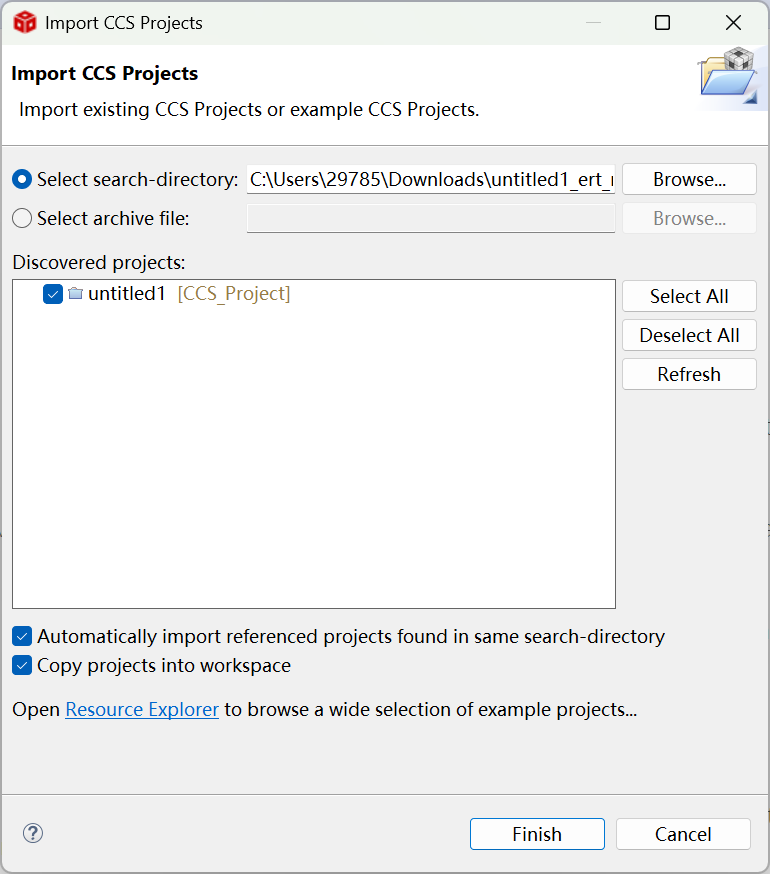
导入matlab生成的文件路径
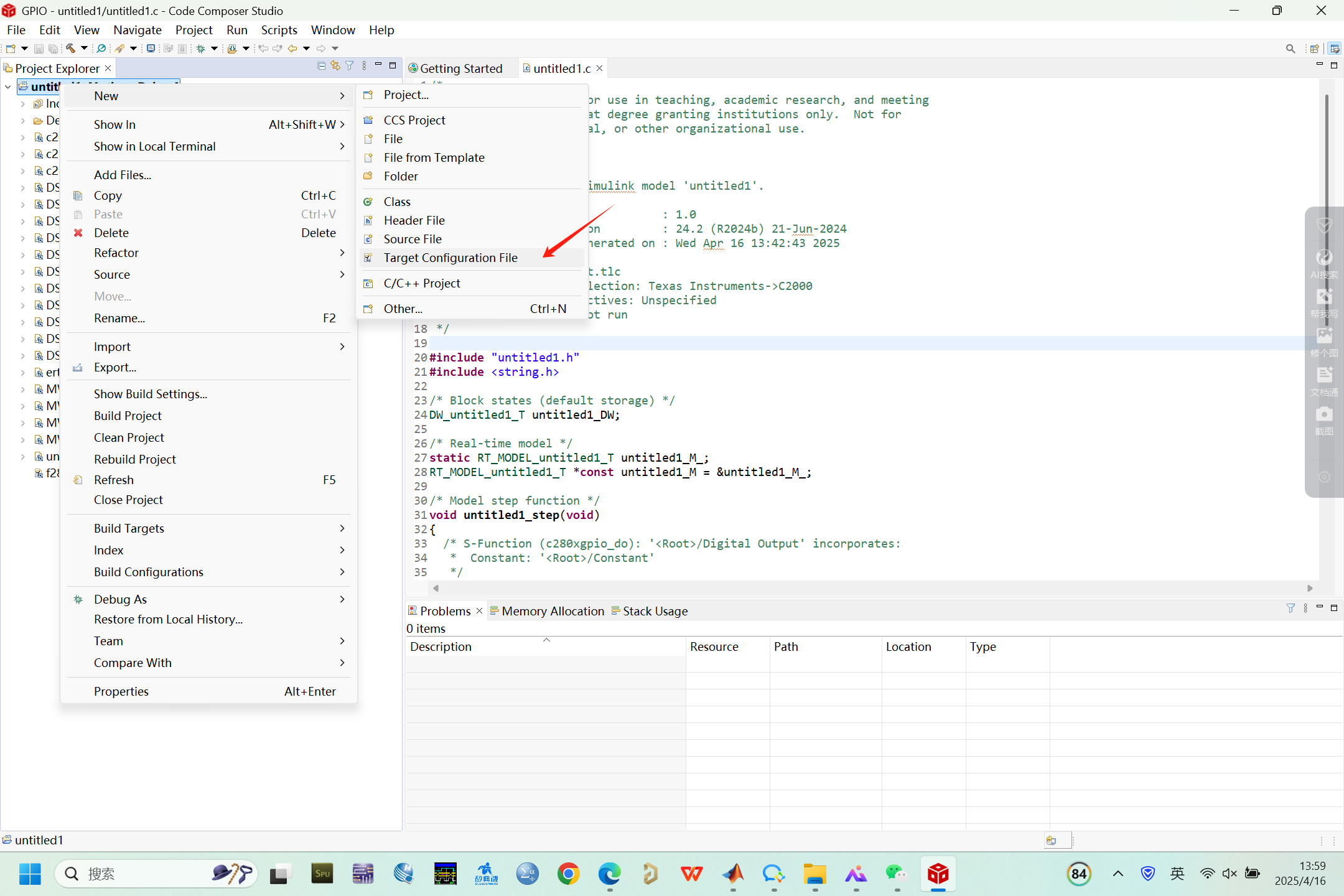
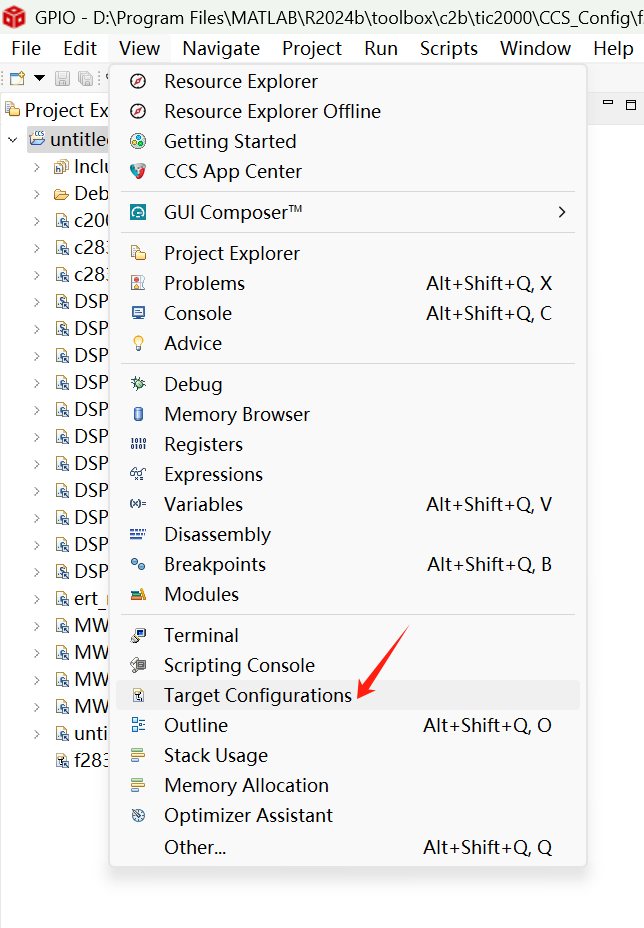
打开工程后右键,如图所示点击Target Configuration File
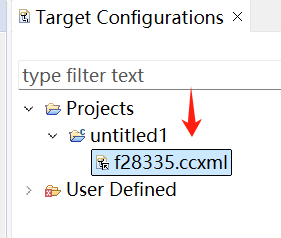
如果忘记修改而直接退出,可以按图所示方法重新配置
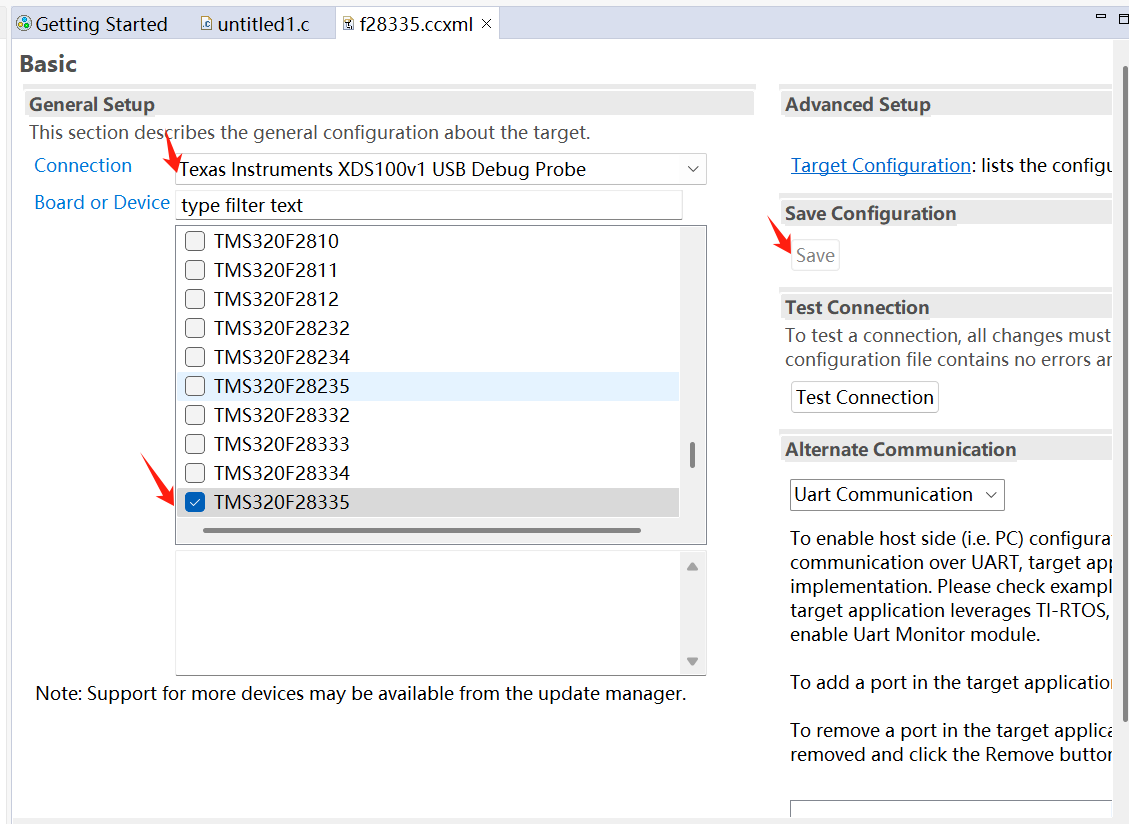
按如图所示save好配置
点击锤子进行编译,编译成功后可连接开发板进行烧录