MATLAB 控制系统设计与仿真 - 38
多变量系统 控制器设计实例1
控制器设计实例1
考虑如下给出的多变量系统模型:
考虑混合灵敏度问题,引入加权矩阵:
设计鲁棒控制器,并绘制闭环系统的阶跃响应曲线及开环系统的奇异值曲线。
MATLAB代码如下:
clear all;clc;
s=tf('s');
g11=tf([0.806 0.264],[1 1.15 0.202]);
g12=tf([-15 -1.42],[1 12.8 13.6 2.36]);
g21=tf([1.95 2.12 0.49],[1 9.15 9.39 1.62]);
g22=tf([7.15 25.8 9.35],[1 20.8 116.4 111.6 18.8]);
G=[g11 g12; g21 g22];
W1=[100/(s+0.5) 0; 0 100/(s+1)];
W2=tf(1)*[10^-5 0; 0 10^-5];
W3=[s/100 0;0 s/200];
P=augtf(G,W1,W2,W3);
[K,CL,gamma]=hinfsyn(P);
figure(1)
step(feedback(G*K,eye(2)),0.1);
grid on;
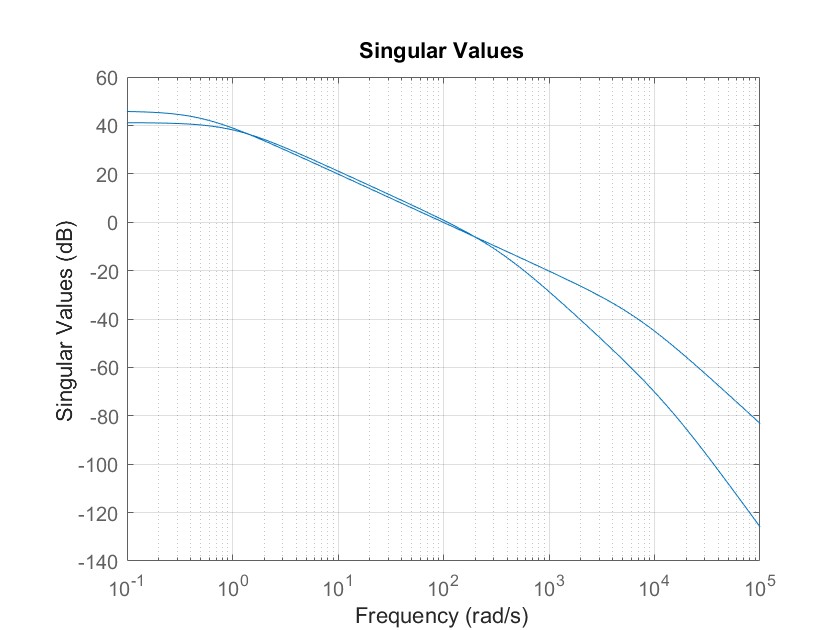
figure(2)
sigma(G*K)
grid on;程序运行结果如下:
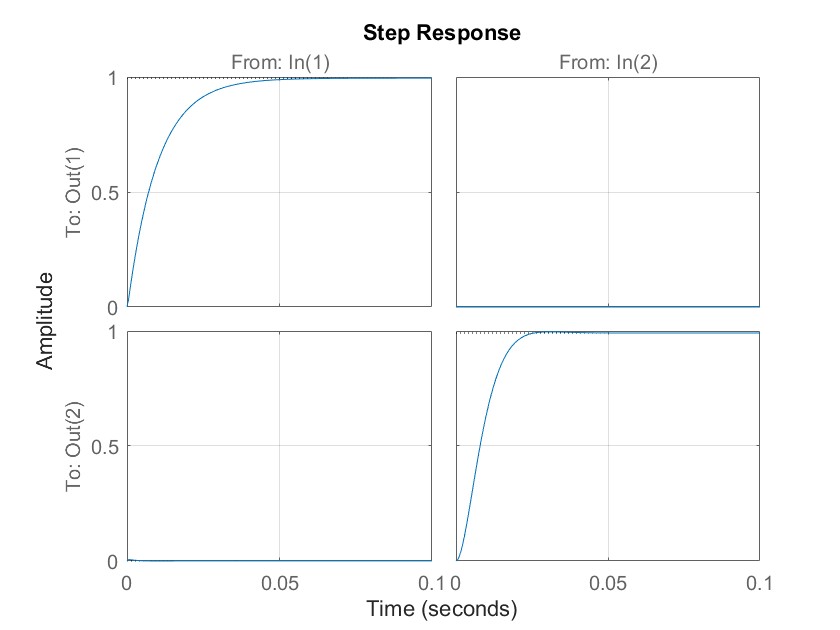
从结果可以看出,得出的阶跃响应是很理想的,第1路阶跃输入作用于子系统时能得出很好的y1输出,而y2几乎为0.当第2路输入单独作用时效果也很好,然而这样设计出来的控制器阶次是相当高的。例如K(1,2)控制器的传递函数为:
>> tf(K(1,2))ans =9624 s^13 + 2.982e08 s^12 + 1.562e12 s^11 + 4.93e13 s^10 + 5.738e14 s^9 + 3.033e15 s^8 + 7.55e15 s^7 + 1.013e16 s^6 + 7.884e15 s^5 + 3.663e15 s^4 + 1.014e15 s^3 + 1.618e14 s^2 + 1.355e13 s + 4.52e11 --------------------------------------------------------------------------------------------------------------------s^14 + 2.089e04 s^13 + 1.005e08 s^12 + 3.42e10 s^11 + 8.161e11 s^10 + 6.824e12 s^9 + 2.461e13 s^8 + 4.801e13 s^7 + 5.644e13 s^6 + 4.205e13 s^5 + 2.019e13 s^4 + 6.189e12 s^3 + 1.165e12 s^2 + 1.223e11 s + 5.466e09Continuous-time transfer function.
Model Properties另外根据阶跃响应结果可知,y22的响应速度和y11相比显得很慢,因此需要加重y22的权重。
令:
重新设计最优鲁棒控制器,MATLAB代码为:
W1=[100/(s+0.5) 0; 0 1000/(s+1)];
P=augtf(G,W1,W2,W3);
[K,CL,gamma]=hinfsyn(P);
figure(1)
step(feedback(G*K,eye(2)),0.1);
grid on;
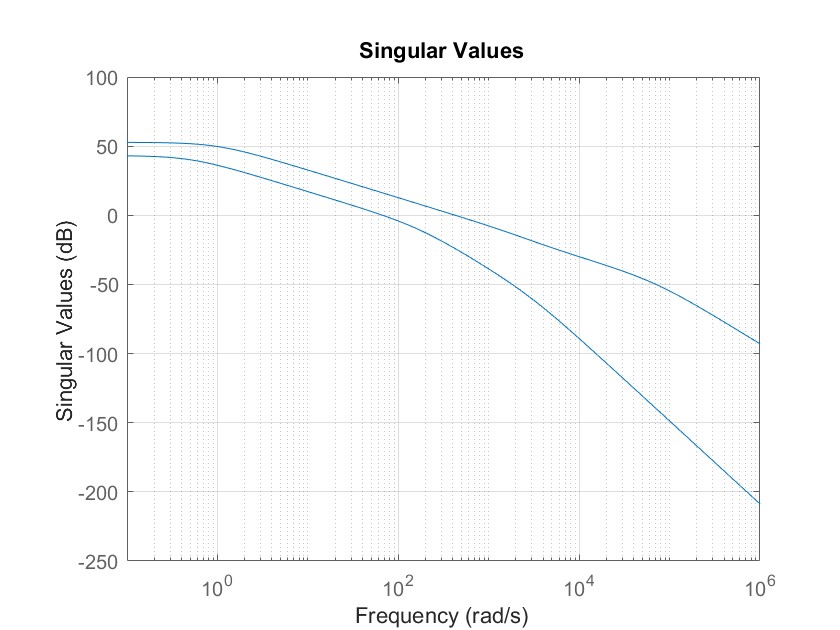
figure(2)
sigma(G*K)
grid on;程序运行结果为:
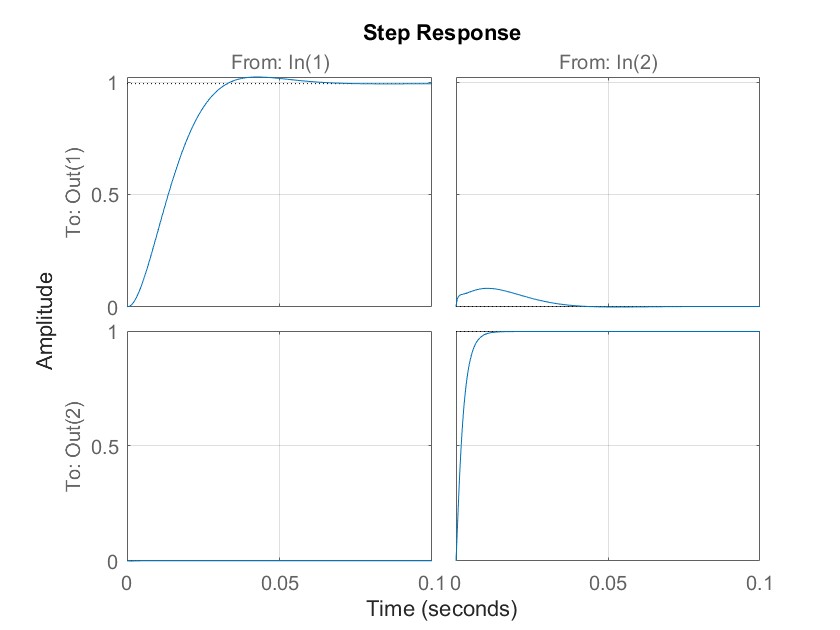
由上图可知,在新的控制器下,y22效果明显改善。
新的控制器传递函数为:
tf(K(1,2))ans =1.07e07 s^13 + 3.147e10 s^12 + 6.161e12 s^11 + 1.741e14 s^10 + 1.939e15 s^9 + 1.002e16 s^8 + 2.471e16 s^7 + 3.306e16 s^6 + 2.574e16 s^5 + 1.2e16 s^4 + 3.343e15 s^3 + 5.393e14 s^2 + 4.591e13 s + 1.571e12------------------------------------------------------------------------------------------------------------------s^14 + 7.391e04 s^13 + 1.707e08 s^12 + 3.072e10 s^11 + 6.998e11 s^10 + 5.765e12 s^9 + 2.068e13 s^8 + 4.025e13 s^7 + 4.725e13 s^6 + 3.517e13 s^5 + 1.688e13 s^4 + 5.172e12 s^3 + 9.735e11 s^2 + 1.022e11 s + 4.565e09Continuous-time transfer function.
Model Properties由于控制器的阶次较高,在实际应用中难以实现,因此可以考虑采用降阶算法降低控制器的阶次。可以采用闭环系统的控制器模型降阶的概念,降低控制器的阶次直接实现降阶。
最后,欢迎大家有问题给我留言。
非常感谢小伙伴们的-点赞-收藏-加关注。