8. ROS中常见命令
1)rosnode : 操作节点
2)rostopic : 操作话题
3)rosservice : 操作服务
4)rosmsg : 操作msg消息
5)rossrv : 操作srv消息
6)rosparam : 操作参数
1)rosnode
rosnode ping 测试到节点的连接状态
rosnode list 列出活动节点
rosnode info 打印节点信息
rosnode machine 列出指定设备上节点
rosnode kill 杀死某个节点
rosnode cleanup 清除不可连接的节点
2) rostopic
rostopic bw 显示主题使用的带宽
rostopic delay 显示带有 header 的主题延迟
rostopic echo 打印消息到屏幕
rostopic find 根据类型查找主题
rostopic hz 显示主题的发布频率
rostopic info 显示主题相关信息
rostopic list 显示所有活动状态下的主题
rostopic pub 将数据发布到主题
rostopic type 打印主题类型
其中 rostopic list / rostopic pub / rostopic echo /rostopic info 是比较重要的,下面展开说说
以小乌龟的GUI为例
首先启动roscore
roscore在终端输入
rosrun turtlesim turtlesim_node1) rostopic list 打印当前运行状态下的主题名称

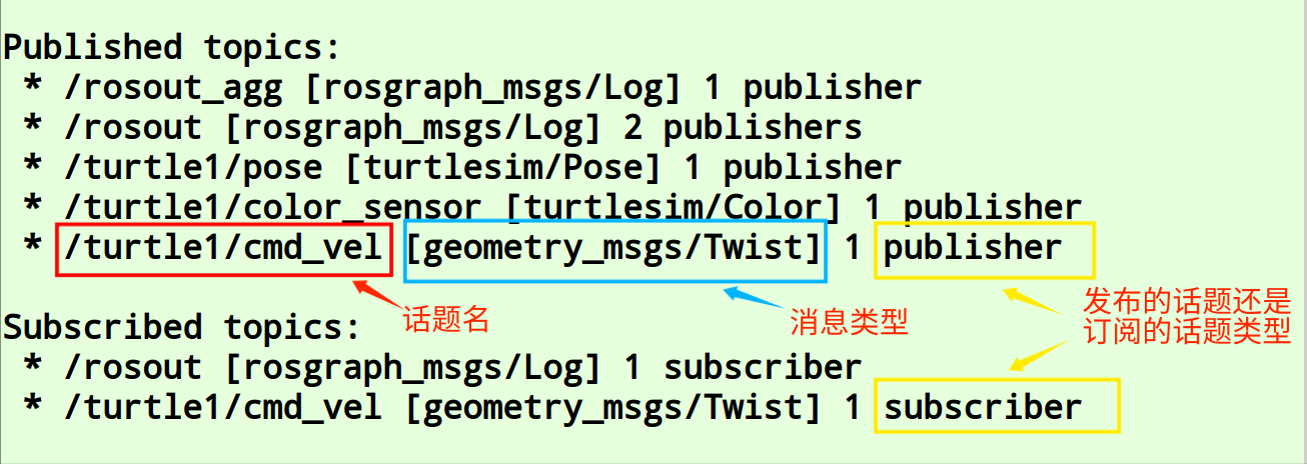
rostopic list -v 获取话题详情(比如列出:发布者和订阅者个数...),所以这个更详细,更好用
2) rostopic pub 向订阅者发布消息,相当于话题通信中的发布方
使用方法:
rostopic pub /话题名称 消息类型 消息内容
rostopic pub /chatter std_msgs gagaxixi
还是以小乌龟为案例 订阅者 发布一条运动信息,使乌龟做圆周运动
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist在空格后再按下tab键补全消息内容
"linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 2.0"
// 以 10HZ 的频率循环发送运动信息3) rostopic echo获取指定话题当前发布的消息,相当于订阅者
rostopic echo [options] /topic4) rostopic info 获取当前话题的具体信息,包括消息类型,发布者信息,订阅者信息等
2) rostopic : 操作话题
rosservice args 打印服务参数
rosservice call 使用提供的参数调用服务
rosservice find 按照服务类型查找服务
rosservice info 打印有关服务的信息
rosservice list 列出所有活动的服务
rosservice type 打印服务类型
rosservice uri 打印服务的 ROSRPC uri
6)rosparam : 操作参数
rosparam set 设置参数
rosparam get 获取参数
rosparam load 从外部文件加载参数
rosparam dump 将参数写出到外部文件
rosparam delete 删除参数
rosparam list 列出所有参数