强化学习机器人路径规划——Sparrow-v1.1复现教程
Sparrow是一个开源的移动机器人路径规划模拟器,重视模拟速度和轻量化,使用DDQN强化学习方法进行训练。本文在其基础上,增加了绘制训练曲线教程,并给出了自制地图文件,以实现在自己的地图上进行训练。
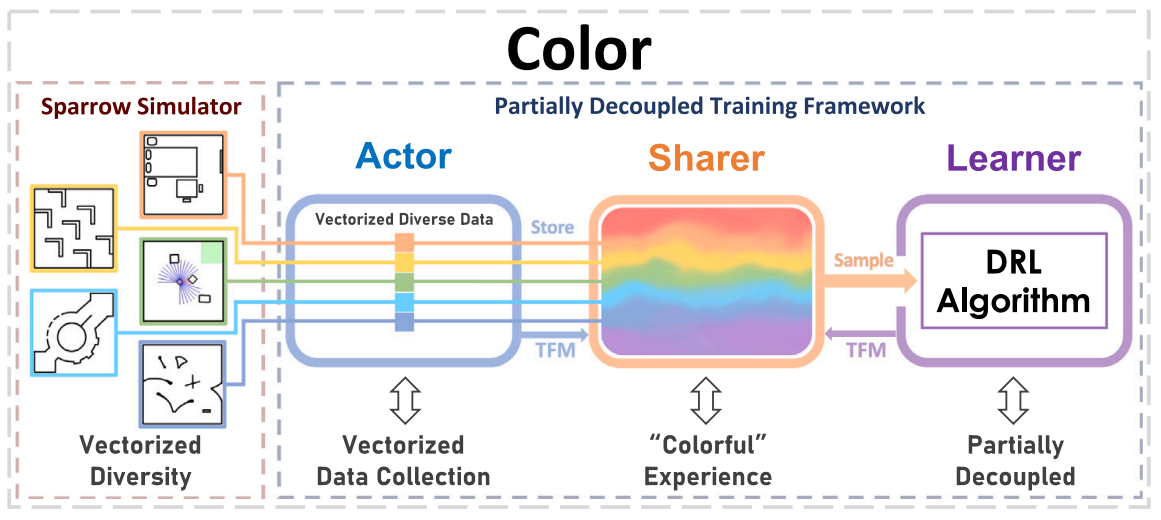
模型示意图
源码地址:https://github.com/XinJingHao/Sparrow-V1
完整代码地址:https://download.csdn.net/download/hsdujdjrjrj/90701650
论文:Xin, J.