【无人机】无人机的电调校准,ESC Calibration,PX4使用手册电调校准详细步骤
目录
1、前提 条件
2、详细步骤
3、故障 排除
无人机的电调校准,ESC Calibration,PX4使用手册电调校准详细步骤
参考:ESC 校准 |PX4 指南 (v1.15)
信息
这些说明仅与 PWM ESC 和 OneShot ESC 相关。DShot 和 CAN ESC (DroneCAN/Cyphal) 不需要这种校准。
电子速度控制器 (ESC) 根据来自飞行控制器 (FC) 的输入命令调节电机速度(和方向)。ESC 将响应的输入命令范围通常是可配置的,即使同一型号的 ESC 之间也可能不同,默认范围也可能不同。
此校准使用来自飞控的固定最大 (2000us) 和最小 (1000us) PWM 输入更新所有 ESC。随后,机体上的所有 ESC/电机将在整个输入范围内以相同的方式响应飞行控制器的输入。
建议所有支持此工具的 PWM/OneShot ESC 使用此工具进行校准。
信息
校准对于低成本 ESC 尤为重要,因为它们对输入的响应通常差异很大。
但是,也建议将其用于高质量的控制器。尽管这些是工厂校准的,并且都应该以相同的方式响应,但实际上 input 范围可能会有所不同。例如,如果控制器在出厂后进行了手动校准,则它可能不再以相同的方式运行。
警告
如果您想使用不支持此校准的 ESC,则必须对其进行工厂校准,并且开箱即用。这应该使用 Actuator Testing 进行验证。跳转到 actuator 配置步骤 (7) (这仍然很重要)。
OneShot ESC 应在校准前配置为使用 OneShot。即使您之前已经校准过,也应在切换后校准 ESC。
1、前提 条件
校准序列要求您能够在手动为 ESC 供电时保持飞行控制器的电源。
如果使用 Pixhawk 飞控,推荐的方法是通过 USB 单独为飞控供电,并在需要时连接/断开电池为 ESC 供电。无法通过 USB 为自动驾驶仪供电的飞行控制系统将需要不同的方法。
如果电池通过电源模块连接,则校准程序可以检测电池连接并使用它来驱动校准序列。如果无法检测到电池电量,则根据超时执行校准序列。
2、详细步骤
要校准 ESC:
-
拆下螺旋桨。
警告
切勿在打开螺旋桨的情况下尝试 ESC 校准!
电调校准期间电机不应旋转。但是,如果在 ESC 已经通电时开始校准,或者如果 ESC 没有正确支持/检测校准序列,则它将通过以最大速度运行电机来响应 PWM 输入。
-
将您正在校准的 ESC 映射为车辆的 Actuator Configuration 中的电机。只有映射的执行器才能获得输出,并且只有映射为电机的 ESC 才会被校准。
-
拔下电池,断开 ESC 的电源。飞行控制器必须保持通电,例如,通过将 USB 连接到地面站。
-
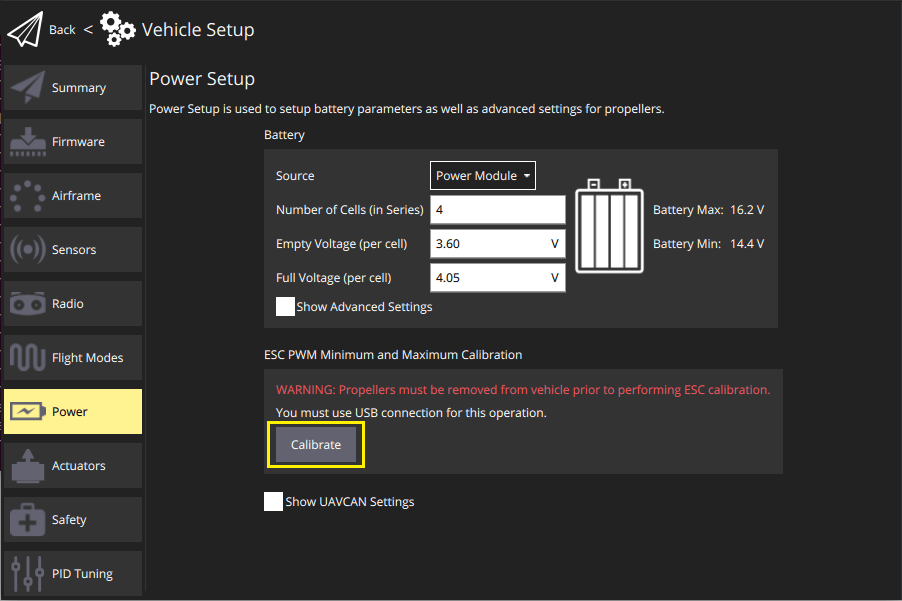
打开 QGroundControl 设置> Power,然后按 Calibrate 按钮。
-
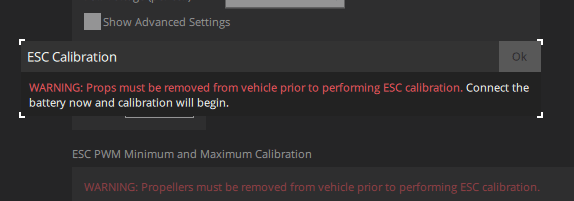
在无误地启动校准序列后,直接为 ESC 供电(应提示您):
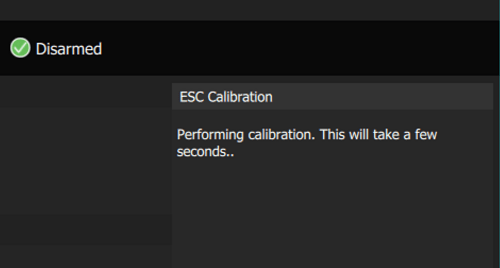
校准将自动开始:
-
在校准过程中,您应该会听到 ESC 发出特定于型号的哔哔声,这表示校准的各个步骤。
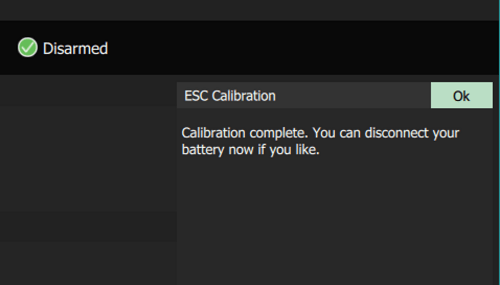
校准完成后,系统将提示您。
-
在 ESC 校准之后,具有相同(重新)校准的 ESC 的所有电机对于相同的输入应以相同的方式运行。执行器配置中电机输出的默认 PWM 设置现在应该开箱即用。
您需要确认电机确实工作正常。由于默认配置值已保守设置,因此您可能还希望针对您的特定 ESC 调整它们。
信息
以下步骤类似于 Actuator Configuration > Motor Configuration 中描述的步骤。
验证以下值:
-
电机的最小值 (default: ) 应使电机缓慢但可靠地旋转,并在停止后可靠地旋转。
1100us在执行器测试中,您可以通过启用滑块,然后将电机的测试输出滑块移动到从底部开始的第一个捕捉位置来确认电机至少旋转(仍然没有螺旋桨)。正确的值应使电机在您将滑块从已撤防移动到最小值时立即可靠地旋转。
要找到 “最佳” 最小值,请将滑块移动到底部 (已撤防)。然后以小增量增加 PWM 输出的设置(例如 1025us、1050us 等),直到电机开始可靠地旋转(最好太高总比太低好)。在所有电机 PWM 输出的设置中输入此值,并将输出恢复为 。
disarmedminimumdisarmed1100us -
应选择电机的最大值 (default: ) ,以便增加该值不会使电机旋转得更快。
1900us您可以通过将关联的测试输出滑块移动到顶部位置来确认电机是否以 Actuator Testing 中的最大设置快速旋转。
要找到 “最佳” 最大值,首先将滑块移动到底部 (已撤防)。然后将 PWM 输出的设置增加到接近默认的最大值 () - 电机应该会旋转。当您以增量方式增加输出的 PWM 最大值时(例如 1925us、1950us 等),请聆听电机的音调。当您增加输出值时,电机的声音不会发生变化时,就会找到最佳值。在所有电机 PWM 输出的设置中输入此值,并将输出恢复为 。
disarmed1900maximumdisarmed1100us -
电机的 disarmed 值 (default: ) 应使电机停止并保持停止状态。
1000us您可以在 Actuator Testing 中确认这一点,方法是将测试输出滑块移动到滑块底部的捕捉位置并观察电机不旋转。
如果 ESC 以默认值 1000us 旋转,则 ESC 未正确校准。如果使用无法校准的 ESC,则应将输出的 PWM 输出值降低到电机不再旋转的水平(例如 950us 或 900us)以下。
信息
VTOL 和固定翼电机不需要任何特殊的 PWM 配置。使用默认的 PWM 配置,当自动驾驶仪发出命令时,它们将在飞行过程中自动停止。
-
3、故障 排除
-
校准可以表明它已成功,即使它已失败。
如果您没有在正确的时间为 ESC 供电,或者 ESC 不支持校准,则会发生这种情况。发生这种情况是因为 PX4 没有来自 ESC 的反馈来知道校准是否成功。您必须依靠在校准和后续电机测试期间解释蜂鸣声,以确定校准是否有效。
-
如果您配置并连接了电源模块(出于安全原因),则无法开始校准。
首先拔下 ESC 的电源。如果您因为需要电源模块来保持飞行控制器活动而被阻止,但您可以单独为电调(取消)供电,您可以使用参数BATn_SOURCE暂时禁用电源模块的检测,仅用于 ESC 校准。一旦为自动驾驶仪供电的电源模块不再被检测为电池,就可以进行基于定时的校准。
-
如果系统在开始校准后立即检测到电流消耗增加,PX4 将中止校准(出于安全原因)。这需要一个电源模块。